基于RTDS的VDCOL控制仿真研究
2017-03-07林益茂周雅洁刘建国兰泳文顾建新
林益茂,周雅洁,刘建国,兰泳文,顾建新
(国网湖北省电力有限公司检修公司,湖北 武汉 430050)
0 引言
当逆变站或整流站直流电压或交流电压处于较低水平时,经常会通过高压直流输电系统控制来限制直流功率的传输。在低电压水平条件下,直流电流将增加,消耗的无功功率会增多,交流滤波器所发出的无功功率也将以电压平方倍的速率下降,进一步加剧交流母线电压的下降,从而对直流输电以及交流系统的稳定性造成重要的影响。为了避免系统受到较大的扰动时,其稳定性受到破坏,在高压直流控制中引入低压限流环节[1]。VDCOL一般有两种控制类型,即依靠直流电压的低压限流和依靠交流母线电压的低压限流。目前,大多数直流工程均采用DC-VDCOL控制,该类型可以根据直流电压的变化作用于直流电流指令,有效地减少直流故障后可能的换相失败。AC-VDCOL近年来才应用于实际工程中,它依赖实际检测到的交流换相电压作用于直流电流指令,能有效改善交流故障发生后换流站附近交流电压和直流功率的恢复。[2-3]
在高压直流输电实际控制系统中,VDCOL的参数一般会跟随其输入电压信号变化而变化。多数VDCOL仿真实验没有明确VDCOL的参数与其输入电压信号之间的关系,以及这种关系是否有利于系统稳定。本文基于实时数字仿真器,给出VDCOL变斜率控制的函数表达式,并在RTDS仿真平台上搭建模型进行验证。DC-VDCOL与AC-VDCOL这两种控制类型对系统稳定均有一定的作用,但是缺乏对两种不同控制类型的对比性仿真验证,另外,AC-VDCOL正处于初步应用阶段,为了更好地掌握AC-VDCOL对系统稳定性的影响,本文在采用VDCOL变斜率控制的基础上,对比分析了DC-VDCOL与AC-VDCOL这两种控制类型在直流和交流系统发生故障条件下对系统暂态稳定的影响,验证了变斜率VDCOL控制与AC-VDCOL控制的有效性。
1 VDCOL控制参数对系统稳定性影响分析
低压限流环节的任务是在直流电压或交流电压跌落到某个指定值时对直流电流指令进行限制。当交流电网换相母线电压过低,即使点火角α调节至最小值(5o)也可能无法使直流电流达到电流指定值,VDCOL通过降低电流指令,使系统传输功率自动运行于可控的降容状态。如图1所示,VDCOL通常包括一个最小电流指令IL限制功能,目的是防止电流太低时可控硅在导通期间关断电流。最小电流指令一般取值为0.1 pu,但在应用时可降低此值。当HVDC工程用于联网频率控制时,应将此值改为0 pu,这样可使两端换流站在起动过程中小负荷运行。VDCOL功能包括一个最大电流指令IH限制,此值一般与最大过负荷限制相等。低压限流特性的直流电压动作值UL通常取0.45~0.35 pu,其最高电压门槛值UH通常取0.7~0.9 pu[4]。
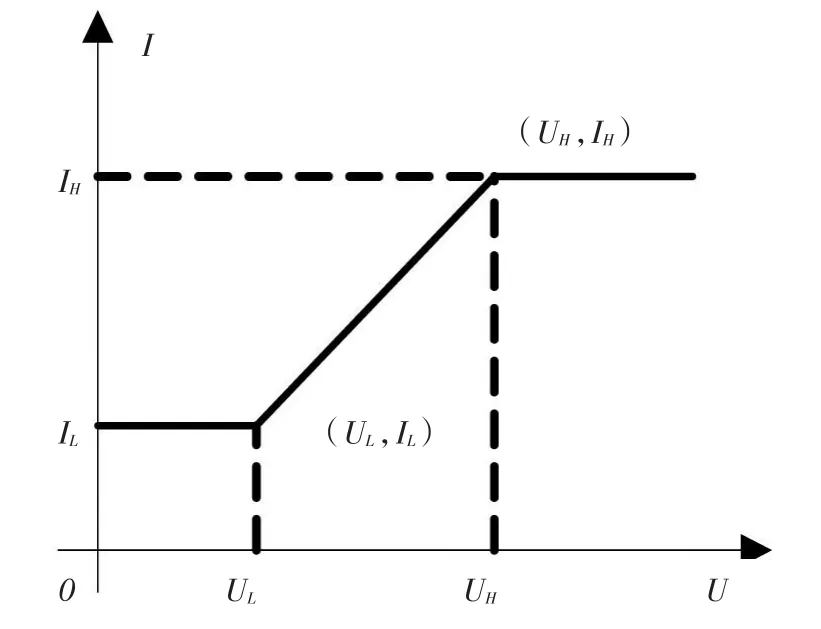
图1 VDCOL的I-U特性曲线Fig.1 I-U Characteristic curve of VDCOL
当IL下降时,I-U的斜率会增大,针对相同的输入电压,直流输送的功率将减少,不利于缓解两端交流系统内的功率平衡[5]。在相同输入电压下,电流指令值将下降,换流站消耗的无功也将减少,因而有利于交直流系统的无功平衡和交流系统的电压恢复。
根据VDCOL中的参数变化,分析了VDCOL参数对直流系统和交流系统稳定性的影响。如表1所示,当IL、UL、IH、UH发生变化时,直流输电系统的功率稳定和交流系统的电压稳定性具有不同的情况。
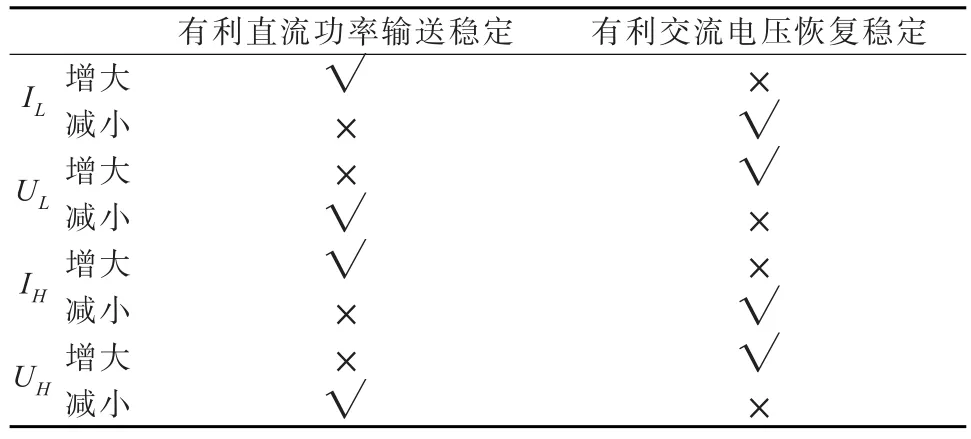
表1 VDCOL参数对直流和交流系统稳定性影响的对照Tab.1 Contrast of VDCOL parameters influence on the stability of DC and AC systems
2 VDCOL控制特性改进
2.1 变斜率控制
参数IL主要用于限制直流电流过低,而参数IH与直流输电系统所允许的负荷限制有关,综合这四个VDCOL参数对直流输电系统和交流系统稳定性的影响,对VDCOL的控制特性做出改进,仅考虑UH和UL的合理搭配。当系统处于正常工况时,交流或直流系统的扰动,即电压水平降低,相比较参数UH和UL,UH对直流输电系统和交流系统稳定性影响较大。UH所设的值越高,电压下降时,电流下降得越快,无功消耗得越少,但不利于直流输送功率的稳定性。根据直流系统所连接的交流系统的强弱程度,来设定UH,强交流系统的电压稳定性一般能够得到保障,UH可以设置偏低,来尽量保证直流输送功率的稳定性。
基于以上的分析,对传统VDCOL的特性进行改进,如图2所示,采用变斜率的I-U特性。相比采用固定的UH,当电压降低时,通过降低UH来控制电流指令,使得直流功率稳定。当交流系统为弱系统时,电压降低时,为了保证交流系统电压稳定,可以采取适当增大UH。
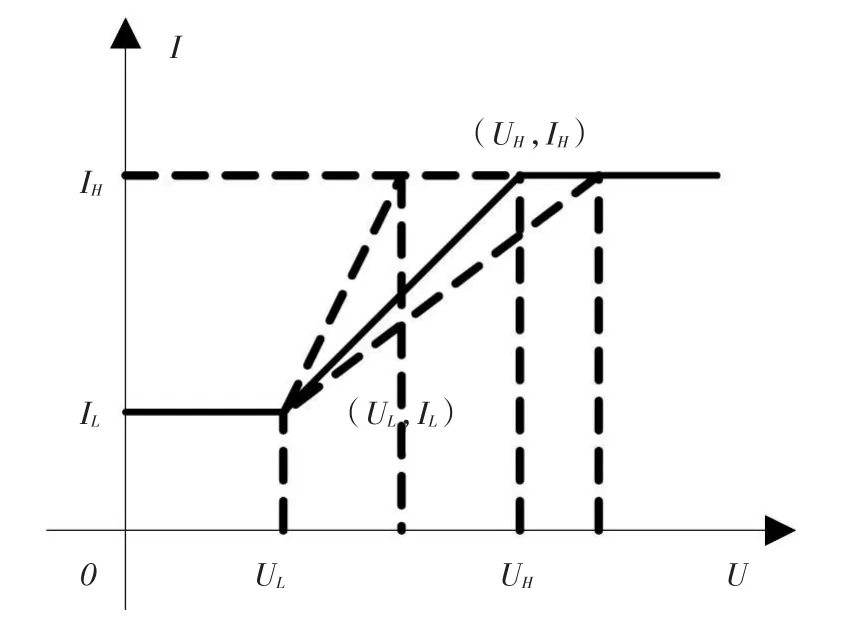
图2 VDCOL改进I-U特性曲线Fig.2 I-U Characteristic curve of improved VDCOL
由图2可知,VDCOL的数学特性可以表达为:
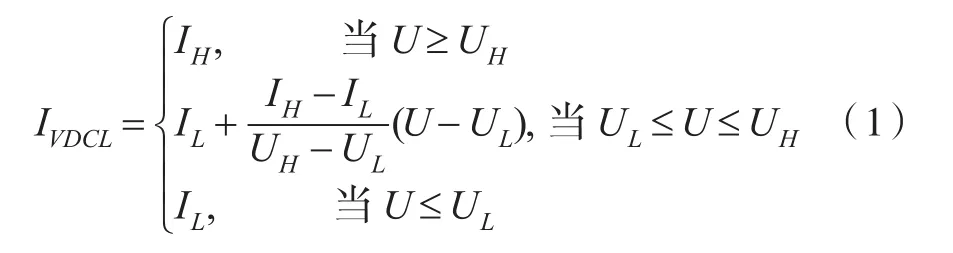
其中UH与U的函数关系可以表示为
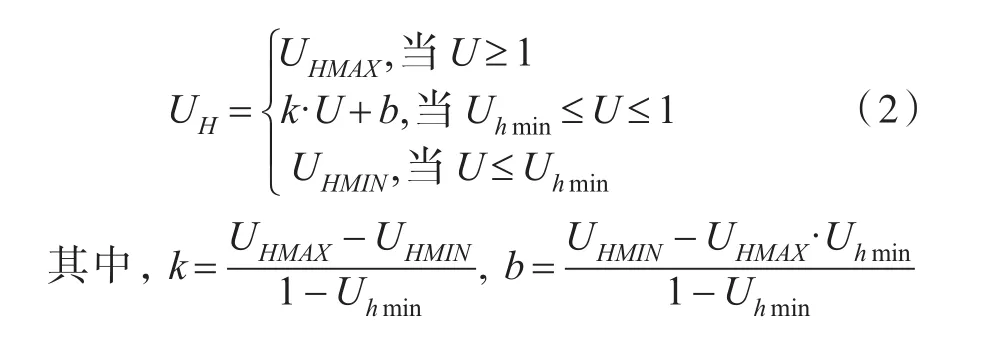
UHMAX指的是UH所允许的最大值,UHMIN指的是UH所允许的最小值,UHMAX与UHMIN可根据不同的工程类型选取不同的值,在本文仿真模型搭建中,取UHMAX=0.75,UHMIN=0.6,Uhmin代表的是所检测的电压最低门槛值,本文中取Uhmin=0.8,以上均为标幺值。
2.2 改进特性仿真验证
本实验参考±500 kV三常直流联网工程,搭建一次等值模型和二次简单控制系统,如图3所示一次RTDS仿真模型。三常工程的相关运行参数如下:额定直流输送功率:Pd=3 000 MW;额定直流电压:Ud=±500 kV;额定直流电流:Id=3 kA。
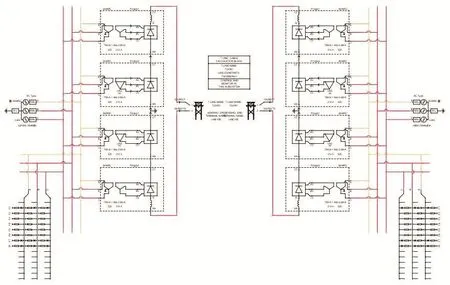
图3 常规直流输电一次系统RTDS模型Fig.3 Model of primary system of traditional HVDC system in RTDS
整流侧交流母线线电压:U=525 kV;逆变侧交流母线线电压:U=500 kV。
整流侧触发角:α=15度;逆变侧关断角:γ=17度。
在高压直流输电运行过程中,逆变侧作为电网的接入点,会有换相失败的状况发生,其VDCOL控制对直流和交流系统稳定性影响更大[6],因而本实验主要研究逆变侧VDCOL的曲线特性对直流和交流系统稳定性的影响,在逆变侧的交流系统中,采用戴维南电源来进行等效。
逆变侧电压为500 kV,初始相位角为-5.4719度,正序阻抗为7.94 Ω,频率50 Hz。
(1)传统VDCOL控制
在传统VDCOL控制中,一般采取UH固定不变。在直流极线和交流母线分别发生接地故障情况下,直流电压和电流变化,以及交流母线电压变化如图4所示。在这里,VDCOL引入的电压信号采用直流电压。
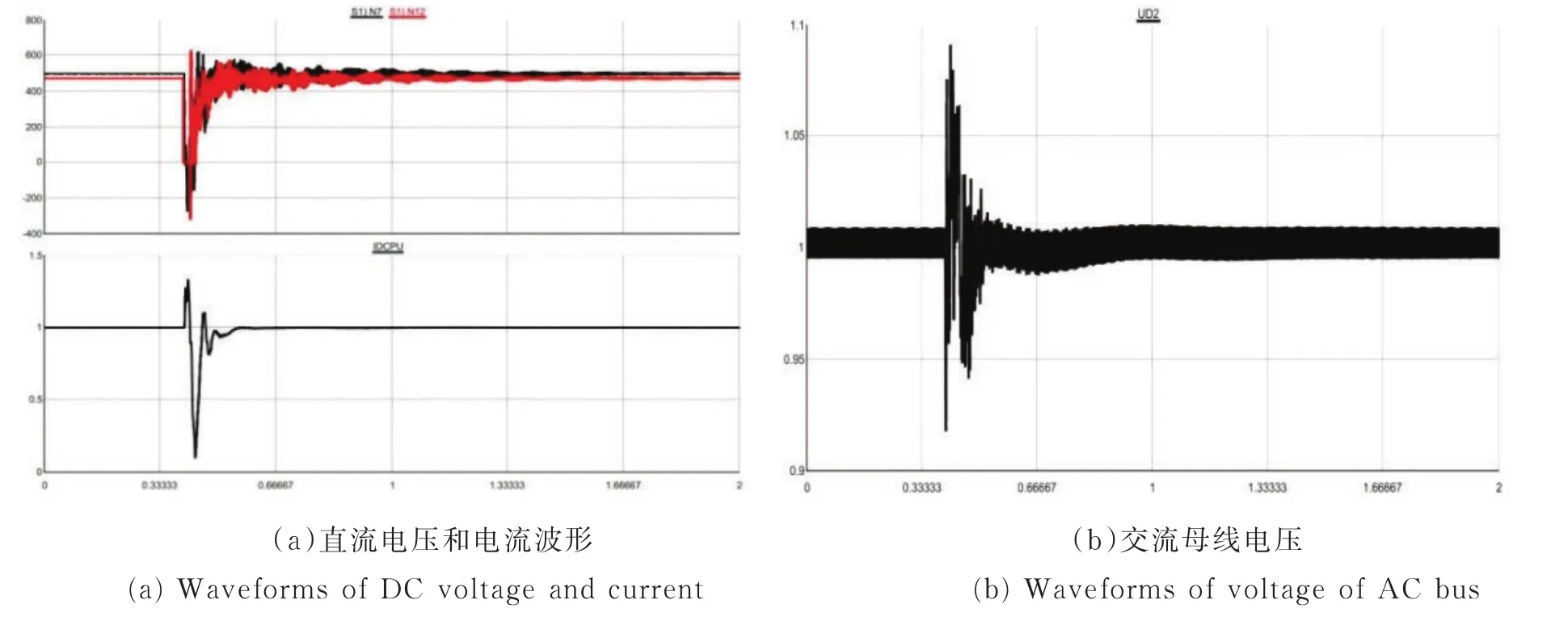
图4 逆变侧直流极线发生接地故障时相关波形Fig.4 Waveforms of voltage and current when a ground fault occurred in DC pole bus in inverter side
图5 交流母线发生接地故障时相关波形Fig.5 Waveforms of voltage and current when a ground fault occurred in AC bus
(2)改进VDCOL控制
根据变斜率控制,进行仿真实验。其中,VDCOL引入的电压信号采取直流电压。在直流极线和交流母线分别发生接地故障情况下,直流电压和电流变化,以及交流母线电压变化如图6所示。
当逆变侧直流极线发生接地故障时,通过对比图4和图6,可以看到,采用改进型的VDCOL控制策略后,直流电流在恢复过程中,其振荡次数明显减少,在交流母线发生接地故障下,也有同样的效果。通过对比传统VDCOL和改进VDCOL,交流母线电压在恢复过程中,其波形振荡也明显减少。通过比较传统VDCOL和改进VDCOL对直流电流命令值的控制,可以发现直流电流振荡最大值有所增加。
在电压下降过程中,变斜率的VDCOL控制通过降低UH提升了电流指令值,这样可以保证直流输电功率的稳定。在电流恢复过程中,随着电压的上升,UH值增大,可以使得电流指令值有所减少,从而保证直流传输功率的稳定,以及直流电流的振荡性减少。由于采取变斜率的VDCOL控制,在电压恢复过程中,降低了电流指令值,换流器消耗的无功功率相应减少,交流母线电压波动变得更小。
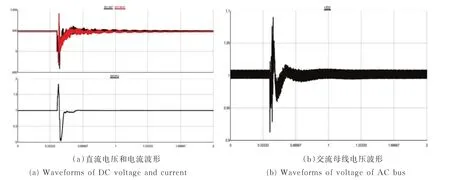
图6 逆变侧直流极线发生接地故障Fig.6 Ground fault in DC pole bus in inverter side
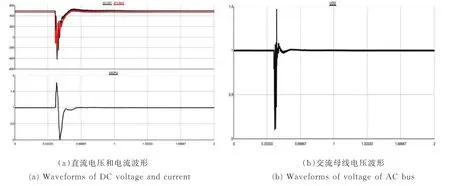
图7 交流母线发生接地故障Fig.7 Ground fault in AC bus
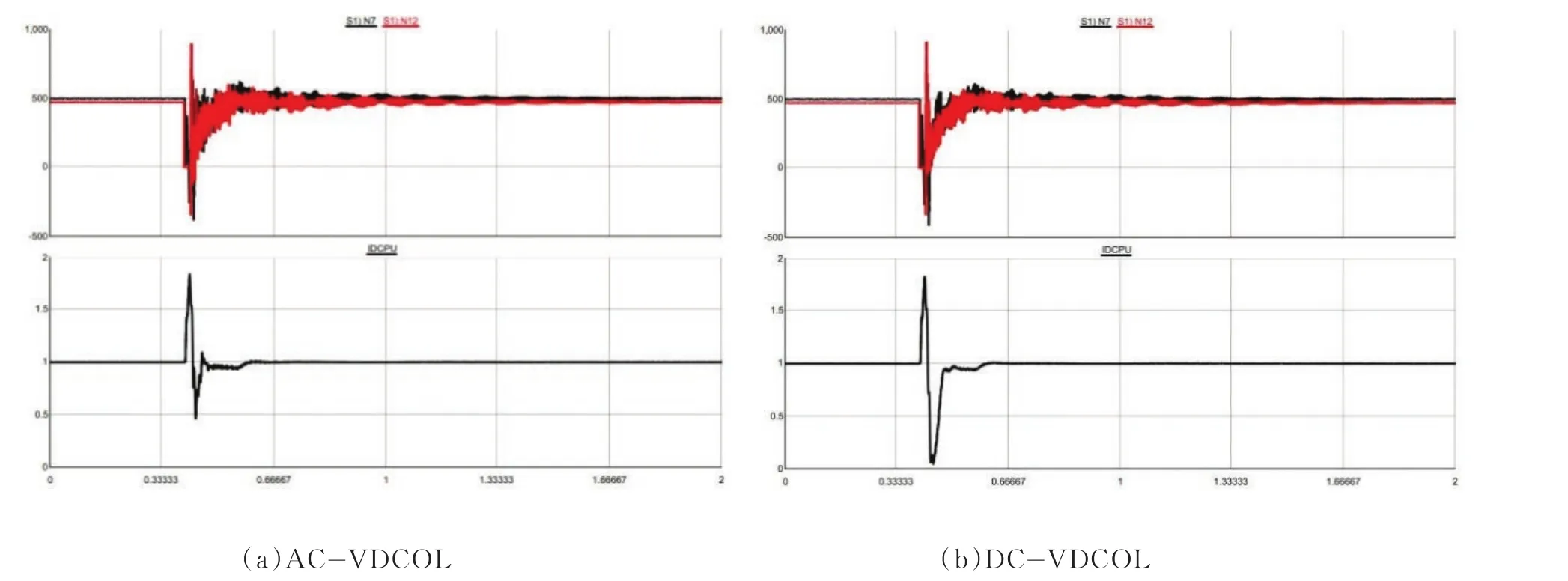
图8 直流故障下的直流电压和电流波形Fig.8 Waveform of DC voltage and current when a fault occurred in DC side
3 VDCOL控制类型比较
VDCOL控制可以通过引入直流电压或是交流电压,来限制直流电流命令值。采用和上述验证实验一样的一次RTDS模型和二次控制系统,仿真研究当直流极线发生接地故障、交流母线发生接地故障时,直流电压和电流,以及交流母线电压,在不同的VDCOL控制类型下,所发生的变化。
(1)研究直流输送功率稳定
在图8中,当直流极线发生接地故障时,VDCOL引入交流电压信号来控制直流电流指令值,能够很好地保证直流电流值振荡幅度,要小于采取直流电压信号。在图9中,也能得到在VDCOL当中引入交流电压,在保证直流电流稳定方面,要优于引入直流电压。在交流故障情况下,采用AC-VDCOL,直流电压的波动程度也要小于DC-VDCOL情况下的。
通过对比AC-VDCOL和DC-VDCOL两种控制类型,在直流故障下,交流系统相对直流系统而言,电压更加稳定,此时引入交流电压到VDCOL当中,直流电流指令值的波动也会更小。当交流母线发生接地故障,采取AC-VDCOL相比DC-VDCOL,可以更加灵敏地反应电压的波动,调整直流电流指令值的输出,从而保证直流输送功率的稳定性。
(2)研究交流电压稳定
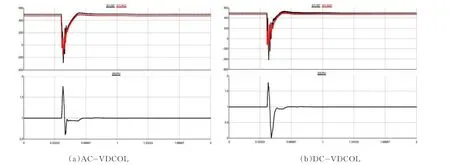
图9 交流故障下的直流电压和电流波形Fig.9 Waveform of DC voltage and current when a fault occurred in AC side
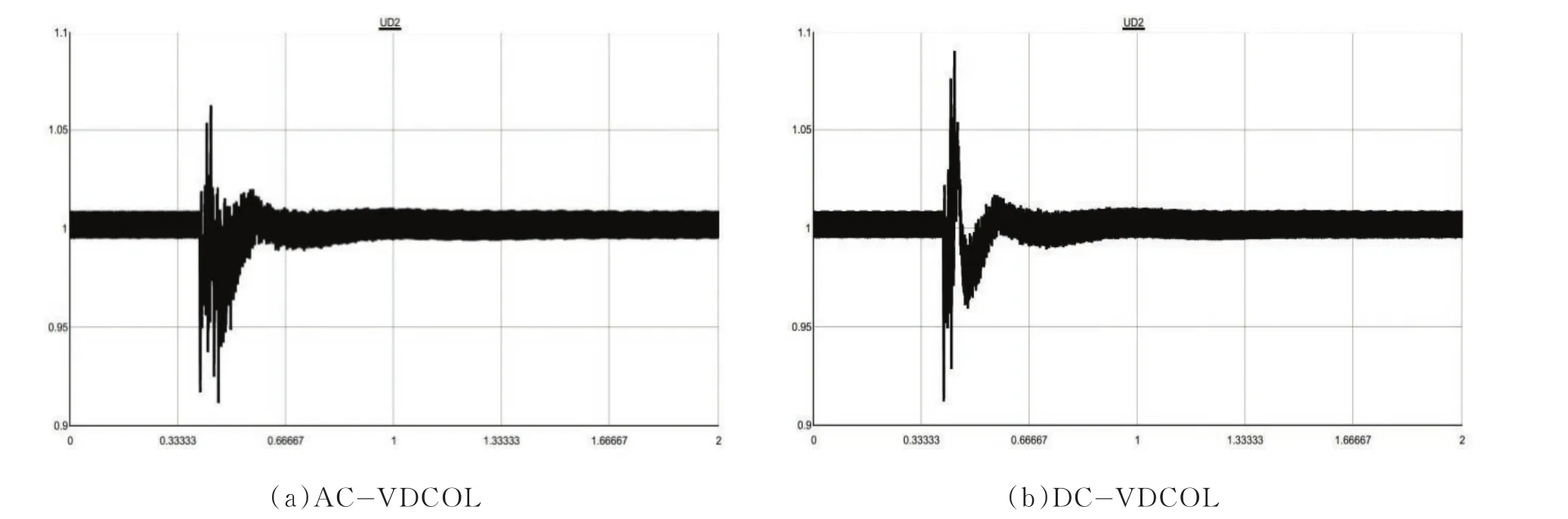
图10 直流故障下的交流电压波形Fig.10 Waveform of AC voltage when a fault occurred in DC side
在图10中,AC-VDCOL控制类型下,交流电压的波动幅度要小于DC-VDCOL当中的,相比较DC-VDCOL当中的电压振荡,AC-VDCOL中的交流电压振荡次数更多。在图11中,两种控制类型对于交流电压的振荡幅度和次数的影响程度基本相同。
在VDCOL控制中采用交流电压信号,当直流发生故障时,可以依靠交流系统更加稳定的电压水平,通过降低电流指令,减少无功消耗,来保证交流电压稳定。
图11 交流故障下的交流电压波形Fig.11 Waveform of AC voltage when a fault occurred in AC side
4 结论
本文从分析VDCOL参数对直流输电稳定性和交流系统电压稳定性出发,给出变斜率的VDCOL控制方式,根据电压输入值的变化来动态调节参数UH,从而调整直流电流命令值。在RTDS仿真实验过程中,验证了变斜率控制有利于直流电流、直流电压以及交流电压的恢复。在电压降低情况下,增大直流电流指令值,可以来保证直流输电的功率稳定。在高压直流输电系统中,采取的是非线性元件,UH和引入VDCOL中电压信号呈线性关系,对于限制直流电压和交流电压波动效果不明显,可以采取一定措施加以改进。通过仿真实验,对VDCOL的两种控制类型进行比较,在AC-VDCOL控制类型下,有利于直流输送功率的稳定,对保证交流电压的稳定性,也有一定的作用。
(
)
[1]杨大春,刘天琪,李兴源,等.VDCOL参数整定的改进对多馈入直流输电系统暂态稳定性的影响研究[J].四川电力技术,2009,32(02):24-27.YANG Dachun,LIU Tianqi,LIXingyuan,etal.Research on influence of VDCOL parameter setting improvement on transient stability of multi-infeed HVDC transmission system[J].Sichuan Electric Power Technology,2009,32(02):24-27.
[2]王珂,杨卫东,方勇杰,晁剑,荆勇,洪潮.有利于多馈入直流输电系统协调恢复的VDCOL控制策略研究[J].江苏电机工程,2007,(01):1-4.WANG Ke,YANG Weidong,FANG Yongjie.et al.Study of VDCOL control strategies for coordinated recovery ofmulti-feed-in HVDC system[J].Electric Power Engineering Technology,2007,(01):1-4.
[3]刘晓明,慈文斌,刘玉田.直流控制方式对受端电网电压稳定性影响[J].电力自动化设备,2011,31(04):69-73+77.LIU Xiaoming,CIWenbing,LIU Yutian.Influence of DC system control mode on voltage stability of receiving-end power grid[J].Electric Power Automation Equipment,2011,31(04):69-73+77.
[4]付颖,罗隆福,童泽,等.直流输电控制器低压限流环节的研究[J].高电压技术,2008,(06):1110-1114.FU Ying,LUO Longfu,TONG Ze,et al.Study on voltage dependent current order limiter of HVDC transmission system's Controller[J].High Voltage Engineering,2008,(06):1110-1114.
[5]陈琦.高压直流输电系统的实时数字仿真研究[D].武汉:武汉大学,2004.CHEN Qi.Study on the Simulation of HVDC Systems with a real-time digital simulator[D].Wuhan:Wuhan University,2004.
[6]廖瑛,梁加红,姚新宇.实时仿真理论与支撑技术[M].长沙:国防科技大学出版社,2002.LIAO Ying,LIANG Jiahong,YAO Xinyu.Real-time simulation theory&supporting technology[M].Changsha:National University of Defense Technology Press,2002.
