基于ADS-B监视技术的飞行器纵向最小间隔研究
2017-03-06吴学礼霍佳楠张建华
吴学礼,霍佳楠,张建华
( 1.河北科技大学电气工程学院,河北石家庄 050018;2.河北省生产过程自动化工程技术研究中心,河北石家庄 050018 )
。
。
L(S)=Ln(S)×Ls(S)。
f(x)=(1-η)N(x|a1)+ηN(x|a2), 0<η<1。
。
基于ADS-B监视技术的飞行器纵向最小间隔研究
吴学礼1,2,霍佳楠1,2,张建华1,2
( 1.河北科技大学电气工程学院,河北石家庄 050018;2.河北省生产过程自动化工程技术研究中心,河北石家庄 050018 )
为解决航路飞行安全问题,提高碰撞风险检测的精确度,主要研究飞行器在平行航路飞行过程中纵向安全间隔的问题。对传统的EVENT碰撞模型进行改进,建立以椭圆柱体为碰撞模板的EVENT模型。介绍了广播式自动相关监视(ADS-B)技术的性能及应用背景,并在改进EVENT模型基础上提出基于ADS-B监视技术下各个参数的计算方法。以中航工业石家庄飞机工业有限责任公司小鹰500机型为模型算例,计算出其最小安全间隔。研究结果符合国际民航组织的飞行安全指标,可为研究基于ADS-B监视技术的风险分级提供一种有效方法。
安全信息工程;ADS-B;椭圆柱体碰撞盒;EVENT模型;碰撞风险;纵向间隔
广播式自动相关监视(ADS-B),是一种为空空监视和地空监视提供自主监视信息的技术手段[1-3]。飞行器通过数据链自动广播其自身的位置和其他飞行状态信息,并实时获取空中ADS-B信息和地面服务信息,达到飞行器之间的相互感知[4];装配ADS-B地面站的地面系统,可以通过数据链接收设备接收视距范围内的飞行器及场面内车辆的ADS-B广播报文,准确获取飞行器飞行ID、经纬度、巡航速度、气压高度等状态信息,并且能够与其他类型的地面站连接,为飞行器提供飞行数据服务[5-6]。ADS-B地面站实时监控飞机最多可达500架,机载应答机、接收机设备更新率为0.5s,定位方式为GPS定位,比传统的二次雷达以询问、应答方式定位更加精确。ADS-B的建设投资只有二次雷达技术的十分之一左右,并且维护费用低,使用寿命更长[7-10]。
在国外,美国最先推行ADS-B技术的是美国通用航空,美国在通用航空领域全面采用的是UAT数据链方式。美国在2010年使ADS-B具有可用性,并且在2013年覆盖了全美国[11-13]。中国对ADS-B的试用正在积极展开,中航工业石家庄飞机工业有限责任公司(简称中航石飞集团)搭建了基于1090ES数据链ADS-B系统,对通航飞机进行了ADS-B机载设备的加装[14]。目前,在飞行试验中能够对飞机进行实时、精确的跟踪监控,通过机载ADS-B设备,飞机之间也可以互相了解对方的飞行状态,飞行训练的安全性有了较大的提高,使得ADS-B技术的先进性和可用性得到了有效验证。
ADS-B凭借其先进的技术优势,未来必然替代二次雷达成为航空监视的重要手段。在ADS-B监视技术下,为增大空域交通流量以及防止飞行冲突,对飞行器的安全间隔研究具有重大的意义。本文首先建立了风险评估模型,然后根据ADS-B导航与监视2个方面来计算飞机之间的碰撞风险,并采用小鹰500作为模型算例,结合实际得出其最小安全间隔。
1 风险评估模型
1.1EVENT碰撞模型
BROOKER教授在2003年初次提出了基于事件的“Post-Reich”模型,即EVENT模型,并对其侧向间隔进行求解[15]。2006年,BROOKER教授又对纵向EVENT模型进行了研究[16],如图1所示。
EVENT碰撞模型在考虑纵向碰撞风险时,为A机定义了一个长方体碰撞盒(A机的机长、翼展、机高的2倍作为长方体的长、宽、高),B机视为一个质点。以B机为原点建立三维坐标系,两机的纵向、侧向、垂直方向定义为x,y,z轴方向,y轴和z轴确定的平面定义为纵向间隔层[13-16]。
如图2所示,飞机即将进入纵向间隔层的位置为A,刚好飞出间隔层的位置为AA。EF为碰撞盒A在垂直方向上移动的距离,HI为侧向移动的距离。在穿越过程中,碰撞盒A的运动区域在纵向间隔层上的投影为CDFGHJ(阴影部分)。那么,如果飞机B恰好位于CDFGHJ中时,两机发生绝对碰撞。由于CDFGHJ形状较为复杂,相对于保守考虑,BROOKER教授定义长方形CEGI为拓展碰撞盒,那么,如果飞机B恰好位于长方形CEGI中时,两机发生碰撞。由此可以推出,纵向碰撞风险的概率就等于碰撞盒A纵向穿越间隔层的概率与飞机B恰好位于扩展碰撞盒的概率的乘积[15-18]。

图1 纵向EVENT碰撞风险模型
Fig.1 Longitudinal EVENT collision risk model

图2 拓展碰撞盒
Fig.2 Extended collision box
根据以上分析,可以推出纵向碰撞风险概率值为
(1)
式中:Px为纵向碰撞风险概率值;E(O)为两机纵向临近率,即相邻航路上同向飞行的飞机纵向间隔小于标准间隔的飞机数量与所有飞机总数的比值;L(S)为在最小安全间隔S下飞机穿越纵向间隔层的概率;Py(O)为同一高度层上两机侧向重叠的概率;Pz(O)为两机垂直重叠的概率;λx,λy,λz分别为A机的机长、翼展、机高;ux,uy,uz为两机在纵向、侧向、垂直方向的相对速度。
1.2 改进的EVENT碰撞模型
在实际飞行过程中,当2架飞机临近时,飞机一般都是通过调节垂直高度防止相撞。2008年徐肖豪[14]在传统EVENT模型基础上,将模型中长方体碰撞盒改进为圆柱体碰撞盒。2009年张晓燕等[13]建立了圆球体碰撞盒模型,并对RVSM空域内垂直间隔进行研究。2014年周建等[15]建立了椭球体碰撞盒模型,并计算平行航路侧向安全间隔。但是,以上模型在计算拓展碰撞盒的面积时不够精确,在两机的纵向角度,飞机绕机翼偏转形成的空间形状更加接近于一个椭圆柱体。以椭圆柱体碰撞模板取代传统的长方体碰撞模板显得更加符合实际,并且纵向碰撞风险值更加精确。故以飞机A为中心,λx为高,λy为长半轴,λz为短半轴建立的椭圆柱体碰撞盒,如图3所示。
因为A穿越纵向间隔层的概率与机载设备的监视及导航性能有关,与碰撞盒的具体形状无关,并且飞机B恰好位于扩展碰撞盒的概率与扩展碰撞盒的面积大小成正比关系,因此,只需计算出改进前后扩展碰撞盒面积的比例关系,即可得出改进后的碰撞概率。图4所示,阴影区域KLMNOPQR为改进后椭球体的扩展碰撞盒。

图3 改进EVENT碰撞风险模型
Fig.3 Improved EVENT collision risk model
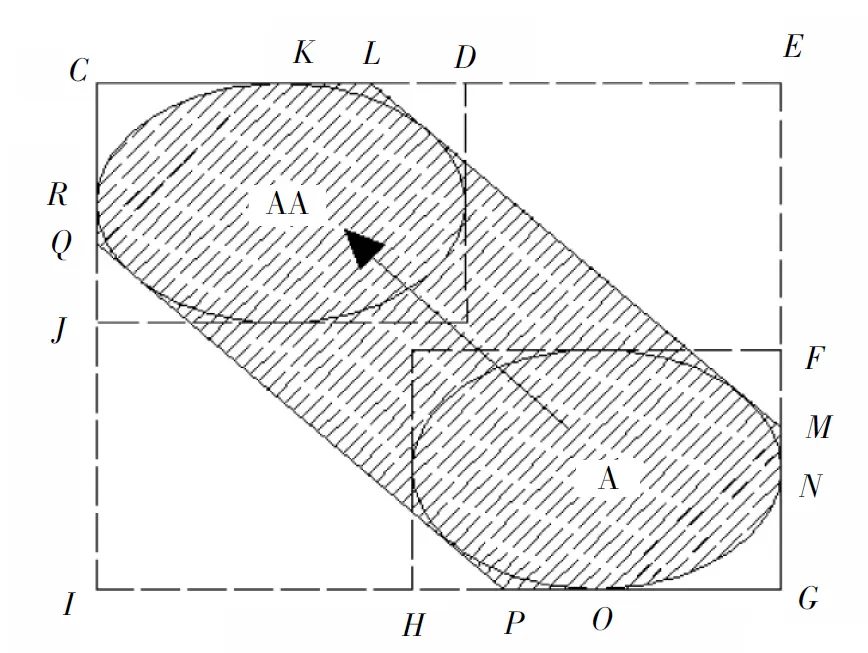
图4 改进拓展碰撞盒
Fig.4 Improved collision box
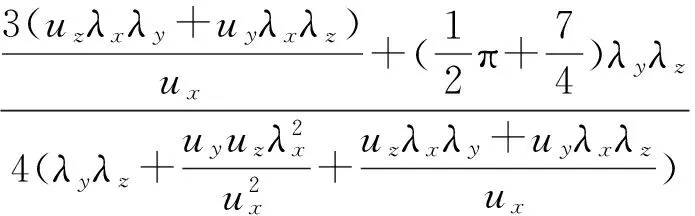
设图2中拓展碰撞盒的面积为S1,图4中拓展碰撞盒的面积为S2,S1与S2的面积之比为R(O)。
EF,IJ为碰撞盒A垂直方向上移动的距离,故
(2)
DE,HI为碰撞盒A侧向移动的距离,故
(3)
又因为图2中
(4)
于是可以推出:
(5)
可以推出:
(6)
(7)


(8)
因此,将式(7)、式(8)代入式(6),可以推出椭圆柱体扩展碰撞盒的面积为
S2=S1-SCRK-SGON-S∆LEM-S∆QPI=

(9)
所以
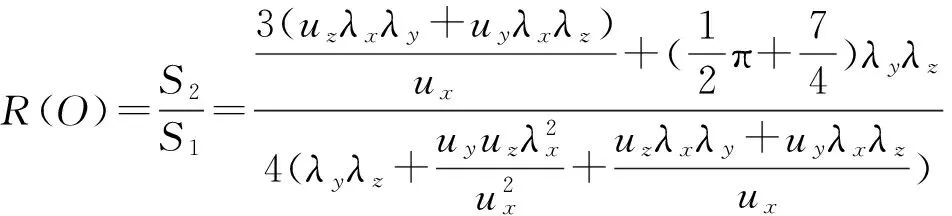
(10)

(11)
2 基于ADS-B监视技术下参数算法的分析
根据式(1),影响纵向碰撞风险值的最主要因素为飞机穿越纵向间隔层的概率,下面分析它们的计算方法。
相比于二次雷达监视技术,ADS-B技术在导航和监视性能上有了较大的提升,故计算飞机纵向穿越率主要从机载设备的导航和监视2个方面考虑。即:
L(S)=Ln(S)×Ls(S)。
(12)
ADS-B系统的位置信息来自于卫星导航系统(GNSS),而GNSS大部分采用的是美国的GPS系统[5]。ADS-B管制下,每架航空器根据机载GPS的定位信息通过应答机发送自身位置报,其他航空器通过机载ADS-B显示器显示的位置信息来避免飞机之间发生冲突。根据参考文献[19],GPS的位置误差服从混合高斯分布:
f(x)=(1-η)N(x|a1)+ηN(x|a2), 0<η<1。
(13)
式中:(1-η)为一般误差出现的比例;η为对碰撞风险影响很大的误差出现的比例;a1为一般误差概率密度函数对应的参数;a2为大误差概率密度函数对应的参数。
飞机在RNP-n程序下飞行时,满足:
(14)
当n确定时,即可求出a1。
假设2架飞机位置相互独立,则基于导航误差导致的纵向穿越率用卷积积分进行计算:
(15)
根据文献[19]的证明可知,基于监视误差导致的偏航误差模型服从指数分布:
(16)
由于机载接收机、机载显示器、地面站监视系统的刷新率和反应时间是导致飞机发生偏航的主要原因,假设监视性能参数为m,m=(刷新时间+反应时间)×ux,飞机的位置误差满足:
(17)
基于监视误差导致的纵向穿越率为
(18)
所以,将式(15)、式(18)代入式(12)即可求出飞机穿越纵向间隔层的概率。
3 算例分析
以通用航空常见的小鹰500(E500)为例,其机体尺寸:机长为7.74m;翼展为9.88m;机高为3.04m。小鹰500的巡航速度为290km/h,由于两机发生纵向重叠的概率很低,纵向、侧向和垂直方向的相对速度取决于间隔标准、机载设备的导航精度、交叉航路的夹角等等因素,很难对其进行统计,需要长周期的实际数据分析。根据参考文献[16-18,20],各个参数的取值如表1所示。
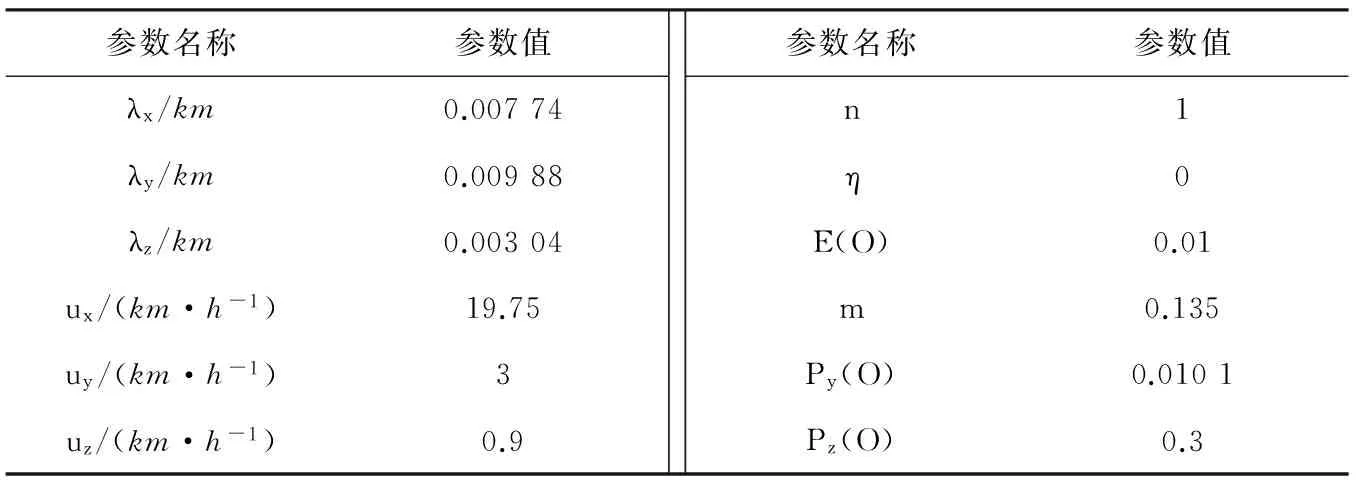
表1 纵向碰撞风险参数表
将表1数据代入式(10),可以得出:
(19)
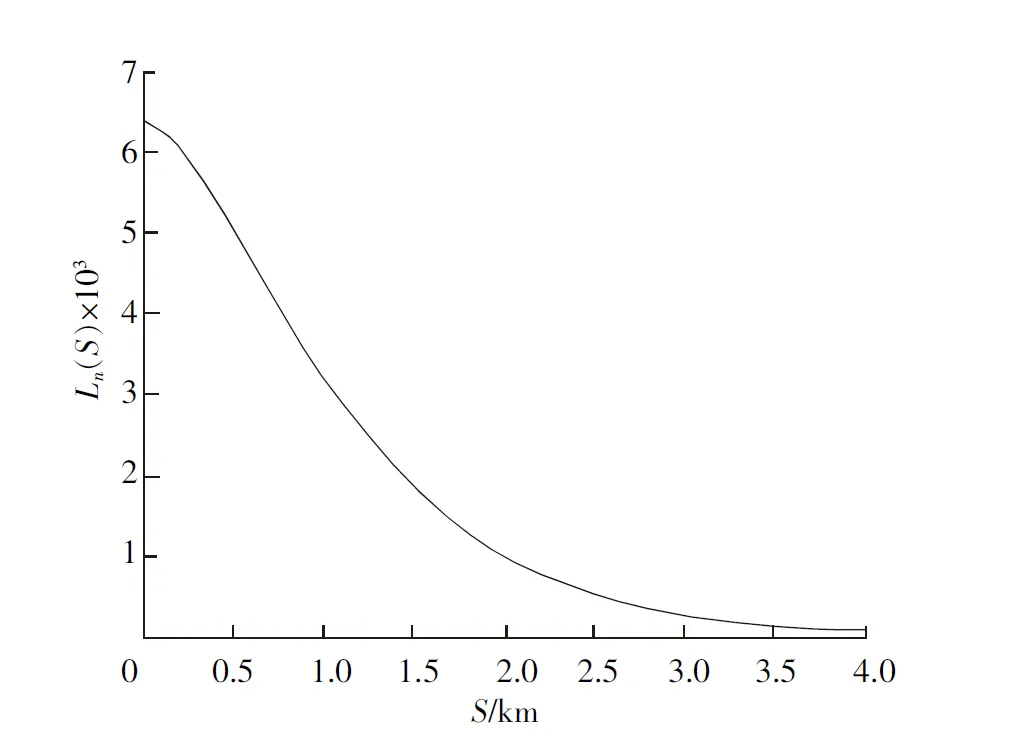
图5 不同间隔S下基于导航性能的纵向穿越率
Fig.5 Longitudinal traverse rate based on navigation performance in different interval S
下面求解飞机穿越纵向间隔层的概率,目前,大多数飞机都是飞RNP-x程序,RNP-x是指以确定的航路为中心,在95%的飞行时间内,飞机侧向偏差能够保证在x海里以内[1-5]。当n=1时,
(20)
由式(20)可以推出:
(21)
只考虑GPS误差引起的飞机位置误差,则η=0。可以推出:

(22)
将式(22)代入式(15)可以得出,不同间隔S下基于导航性能的纵向穿越率Ln(S)如图5所示。
监视性能参数m与机载接收机、机载显示器、地面站监视系统的刷新率和反应时间有关,m=(刷新时间+反应时间)×ux,当ux=19.75km/h时,根据式(17)可以解得b1=0.082 5。将相应数据代入式(18),可得出在不同间隔S下,基于监视误差导致的纵向穿越率Ls(S)如图6所示。
将以上结果及表1数据代入式(1),即可得出在传统的EVENT模型下,基于ADS-B技术纵向碰撞风险值Px,如图7所示。

图6 不同间隔S下基于监视误差的纵向穿越率
Fig.6 Longitudinal traverse rate based on monitoring error in different interval S

图7 不同间隔S下纵向碰撞风险值
Fig.7 Longitudinal collision risk value of S in different intervals
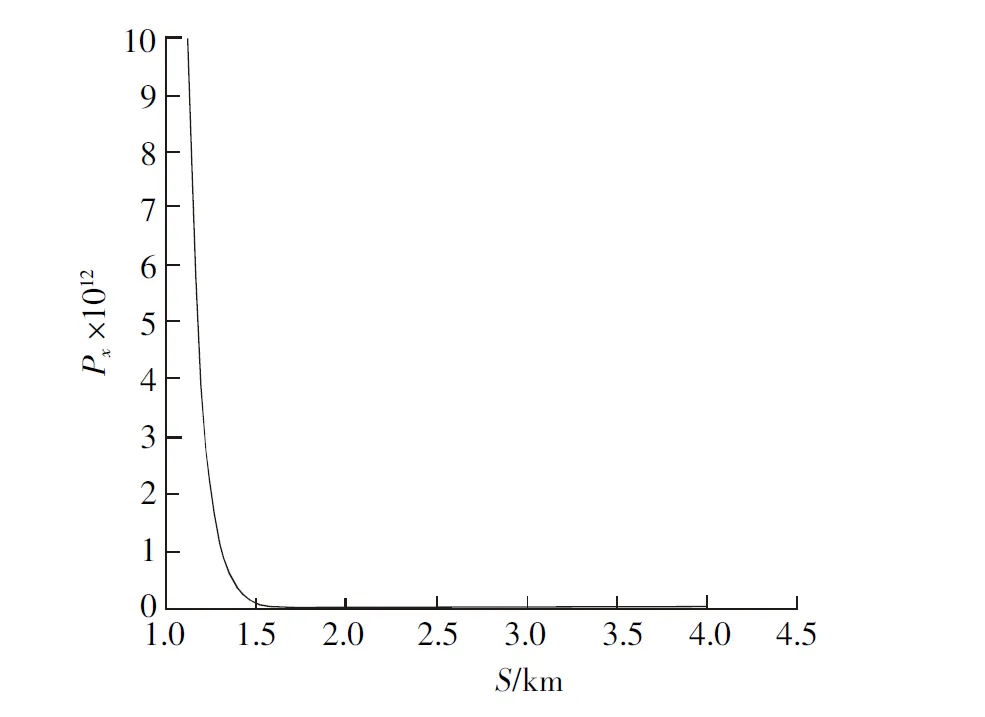
图8 不同间隔S下改进后的纵向碰撞风险值
Fig.8 Improved longitudinal impact risk of S in different interval

4 结 语
本文首先对ADS-B的特点与应用进行简单的介绍;提出了用椭圆柱体碰撞盒代替传统EVENT模型中的长方体碰撞盒的思想,使碰撞风险模型更加符合实际;在ADS-B技术下,结合相关的飞行实际综合分析了导航、监视设备等影响飞行安全的因素;以中航石飞集团小鹰500机型为算例,计算出改进后最小纵向安全间隔为900 m,仿真结果比传统的EVENT模型下纵向间隔标准更加精确。本模型仅对纵向安全间隔进行评估,下一步工作应从侧向、垂直两方面全面分析基于ADS-B技术下的最小间隔,为进一步研究基于ADS-B技术的风险分级提供一整套完善的方法。
/References:
[1] 民航局飞行标准司. 广播式自动相关监视(ADS-B)在飞行运行中的应用[Z]. 北京:民航局飞行标准司,2008.
[2] 龙超, 王文胜, 黄绍斌. 基于模式识别的S模式ADS-B应答信号检测[J]. 指挥信息系统与技术, 2016, 7(3):73-77. LONG Chao, WANG Wensheng, HUANG Shaobin. Response signal detection for modeSADS-B based on pattern recognition[J]. Command Information System and Technology, 2016, 7(3):73-77.
[3] 李颖慧. 关于ADS-B在空中交通管制中的应用[J]. 通讯世界, 2016(3):234. LI Yinghui. On the application of ADS-B in air traffic control[J]. Telecom World, 2016(3):234.
[4] SYD A,YOTTO O. A safety assessment framework for the automatic dependent surveillance broadcast (ADS-B) system[J]. Safety Science, 2015, 78:91-100.
[5] YANG Haomiao, HUANG Rongshun, WANG Xiaofen, et al. EBAA: An efficient broadcast authentication scheme for ADS-B communication based on IBS-MR[J]. Chinese Journal of Aeronautics, 2014, 27(3):688-696.
[6] ZHANG Jun, LIU Wei, ZHU Yanbo. Study of ADS-B data evaluation[J]. Chinese Journal of Aeronautics, 2011, 24:461-466.
[7] ZHANG Tao, WU Renbiao, LAI Ran,et al. Probability hypothesis density filter for rader systematic bias estimation aided by ADS-B[J]. Signal Processing, 2016, 120:280-287.
[8] YAN Fang, MA Zan. Study on airworthiness requirement for the position quality of ADS-B system[J]. Procedia Engineering, 2011, 17:415-421.
[9] 吴学礼, 刘浩南, 许晴. 机器人手臂控制系统的设计与研究[J]. 河北科技大学学报, 2014, 35(4):361-365. WU Xueli, LIU Haonan, XU Qing. Design and research of robot arm control system[J]. Journal of Hebei University of Science and Technology, 2014, 35(4):361-365.
[10]纪志强, 魏明, 吴启蒙, 等. 基于递归神经网络的TVS电脉冲响应建模[J]. 河北科技大学学报, 2015, 36(2):157-162. JI Zhiqiang, WEI Ming, WU Qimeng, et al. EMP response modeling of TVS based on the recurrent neural network[J]. Journal of Hebei University of Science and Technology, 2015, 36(2):157-162.
[11]张建平. 最小间隔安全性的定量评估[J]. 空中交通管理, 2009(4):15-16. ZHANG Jianping. Quantitative assessment of minimum separation safety[J]. Air Traffic Management, 2009(4):15-16.
[12]倪玉德, 马宇申, 刘萍. 基于ADS-B的飞行冲突探测[J]. 中国民航大学学报, 2014, 32(5):31-44. NI Yude, MA Yushen, LIU Ping. Aircraft conflict detection based on ADS-B[J]. Journal of Aviation University of China, 2014,32(5):31-44.
[13]张晓燕, 潘卫军. RVSM空域内垂直间隔的安全评估[J]. 航空计算技术, 2009, 39(5):1-4. ZHANG Xiaoyan. PAN Weijun. Safety assessment of vertical separation in airspace of RVSM[J]. Aeronautical Computing Technique, 2009, 39(5):1-4.
[14]徐肖豪, 李冬滨, 李雄. 飞行间隔安全评估研究[J]. 航空学报, 2008, 29(6):1-8. XU Xiaohao, LI Dongbin, LI Xiong. Research on safety assessment of flight separation[J]. Acta Aeronautic et Astronautica Sinica, 2008, 29(6):1-8.
[15]周建, 周启, 蒋志伟. 平行航路侧向安全评估研究[J]. 中国安全科学学报, 2014(8):26-30. ZHOU Jian, ZHOU Qi, JIANG Zhiwei. Study on safety assessment of parallel route based on lateral separation model[J]. China Safety Science Journal, 2014(8):26-30.
[16]张兆宁, 刘计民. 基于CNS性能的垂直间隔碰撞风险评估[J]. 中国民航大学学报, 2010, 28(1):5-8. ZHANG Zhaoning, LIU Jimin. Assessment of collision risk of vertical separation based on CNS performance[J]. Journal of Aviation University of China, 2010, 28(1):5-8.
[17]BROKKER P. Lateral collision risk in air traffic track systems: a‘post-reich’ event model [J]. Journal of Navigation, 2003, 56(3):399-409.
[18]BROKKER P. Longitudinal collision risk for ATC track systems:A hazardous event model[J]. Journal of Navigation, 2006, 59(1):55-70.
[19]RAN Y, GAZI T, DAVID J. The effect of GPS-based surveillance on aircraft separation standards[J]. IEEE, 1996(4): 360-367.
[20]BROKKER P. Consistent and up-to date aviation safety targets[J].The Aeronautical Journal, 2004, 108(1085):345-356.
Longitudinal minimum interval of aircrafts based onADS-B monitoring technique
WUXueli1,2,HUOJianan1,2,ZHANGJianhua1,2
(1.SchoolofElectricalEngineering,HebeiUniversityofScienceandTechnology,Shijiazhuang,Hebei050018,China; 2.HebeiProvincialResearchCenterforTechnologiesinProcessEngineeringAutomation,Shijiazhuang,Hebei050018,China)
Theproblemoflongitudinalsafetyintervalofaircraftduringparallelairrouteflightisdiscussedinordertosolvetheproblemofflightsafetyandimprovetheaccuracyofthecollisionrisk.ThetraditionalEVENTmodelisimprovedbyusingellipticcylinderasthecollisiontemplate.Theperformanceandapplicationfieldofbroadcastautomaticmonitoring(ADS-B)areintroduced,andbasedontheimprovedEVENTmodel,amethodforcalculatingtheparametersthroughusingADS-Bmonitoringtechnologyisputforward.TakingE500aircraftasamodelexample,theminimumsafetydistanceiscalculated.Theresultsareinlinewiththeinternationalcivilaviationorganization'sflightsafetyindex,whichprovidesaneffectivemethodforthestudyofriskclassificationbasedonADS-Btechnology.
safetyinformationengineering;ADS-B;ellipticcylindercrashbox;EVENTmodel;collisionrisk;longitudinalspacing
1008-1542(2017)01-0052-07
10.7535/hbkd.2017yx01009
2016-04-18;
2016-06-06;责任编辑:李 穆
河北省自然科学基金(F2014208119,F2015208128);河北省教育厅项目(QN20140157);河北省教育厅青年基金(QN20140157,BJ2016020)
吴学礼(1961— ),男(满族),黑龙江齐齐哈尔人,教授,博士,主要从事控制科学与工程方面的研究。
E-mail:wuxueli@hebust.edu.cn
TP
A
吴学礼,霍佳楠,张建华.基于ADS-B监视技术的飞行器纵向最小间隔研究[J].河北科技大学学报,2017,38(1):52-58.WUXueli,HUOJianan,ZHANGJianhua.LongitudinalminimumintervalofaircraftsbasedonADS-Bmonitoringtechnique[J].JournalofHebeiUniversityofScienceandTechnology,2017,38(1):52-58.
