一种新型的硅微机械陀螺数字读出系统
2017-03-06王玉良郑旭东曾青林邢朝洋
王玉良,郑旭东,曾青林,邢朝洋
(北京航天控制仪器研究所,北京100039)
一种新型的硅微机械陀螺数字读出系统
王玉良,郑旭东,曾青林,邢朝洋
(北京航天控制仪器研究所,北京100039)
为了简化系统设计,进一步改善陀螺的控制性能,提出了一种新型的微机械陀螺数字读出系统方案。该方案采用EPLL和AGC技术实现陀螺驱动模态的相位与幅度闭环控制,采用EPLL技术实现检测模态的信号解调。不仅降低了对陀螺品质因数的要求,而且省去了低通滤波器的设计。通过仿真实验不仅验证了该方案的可行性,还研究了EPLL参数对陀螺数字读出系统性能的影响。该方案对今后微机械陀螺系统的实现与性能的进一步提高有一定的指导作用,同时也为今后陀螺系统的误差补偿以及自标定、自校准奠定了基础。
硅微机械陀螺;闭环驱动;数字锁相环;解调
0 引言
微机械陀螺作为一种新型的微惯性传感器,具有体积小、质量小、功耗低、批量生产成本低等优点,因此在国民经济和国防军事等领域都有着重要的应用价值和广泛的应用前景,现在已经受到越来越广泛的关注并出现了许多类型[1,9]。双线振动微机械陀螺的工作原理建立在哥氏效应的基础上,驱动模态振动幅度和频率的稳定性直接影响陀螺的标度因子[2],并且还会直接或间接影响其各项性能参数。因此,对陀螺驱动模态测控电路的研究具有十分重要的意义。
目前,陀螺驱动模态的测控电路主要有自激和锁相环两种方式[3]。自激方式是利用测控电路的噪声自激起振,比较适合采用模拟电路实现;而锁相环方式可以同时实现双闭环控制(幅度控制和频率控制),不仅可以采用模拟电路实现,而且可以采用数字电路实现。以前的驱动电路无论是自激方式还是锁相环方式,检波器后面都须要低通滤波器滤除其中的交流分量后才可以对可控增益放大器进行控制。因为低通滤波器的性能直接影响陀螺驱动模态振动幅度的稳定性[2],所以为了达到更好的性能就必须优化滤波器的设计,增加滤波器的阶数。滤波器阶数的增加不仅会增加运算量和功耗,而且可能还会因为量化误差导致系统不稳定。
本文针对上述问题提出了一种新型的微机械陀螺数字读出系统方案,并对该方案进行了仿真实验。仿真实验结果表明本方案与原数字读出系统方案相比有很大的优势。该方案不仅降低了对陀螺品质因数的要求,而且省去了低通滤波器的设计。这不仅可以减少数字电路资源,降低功耗,而且更加有利于陀螺与测控电路的集成设计。
1 硅微机械陀螺结构与工作原理
1.1 硅微机械陀螺的动力学方程
双线振动微机械陀螺是建立在哥氏效应的基础上的,理想的动力学方程可以表示为:
式中,ωd、ωs分别为驱动模态与检测模态的固有角频率,ζd、ζs分别是各模态的阻尼比,Ω(t)为载体的旋转角速度,Fsinωt为陀螺驱动电极受到的正弦驱动力。解以上微分方程可知陀螺检测模态的输出信号是与驱动力同频的正弦信号,可以用式(3)表示。

式中,Qd和Qs分别是陀螺驱动模态与检测模态的品质因数,kd为驱动模态的弹性系数。
1.2 硅微机械陀螺结构
图1是根据以上方程设计的一种硅微机械陀螺结构[4],它分为驱动和检测两部分。驱动部分由驱动电极、驱动梳齿、外支撑梁、外框、驱动敏感电极构成;检测部分由内支撑梁、内框、检测电极、检测梳齿、反馈电极构成。图中的X方向为陀螺驱动模态振动方向,Y方向为陀螺检测模态振动方向,Z方向为陀螺角速度敏感方向。

图1 硅微机械陀螺结构Fig.1 The structure of a SMG
当两侧驱动梳齿外加一定的电压激励时,外框架在电容式静电驱动器的影响下受到一个交变驱动力的影响,沿X轴做简谐振动。由于内框横梁刚度足够大,可以使内框同外框一起运动。此时,如果Z轴有角速度输入,内框受哥氏效应影响,就会沿Y向做简谐振动,通过检测其振动就可以得到角速度信号。
2 新型锁相环原理
新型锁相环的结构如图2所示,与传统锁相环不同的是其鉴相器由一个积分器、一个90°移相器、一个加法器以及3个乘法器构成[5⁃7]。这种鉴相器的一个优点是可以实时跟踪输入信号基频分量的相位,这不仅可以使输出的同相分量与输入信号保持相关,而且可以使二者保持相位同步,从而使二者的相位误差更小,并且对内部参数变化和外部噪声的影响具有更强的鲁棒性[5]。另一更重要的优点是可以实时跟踪输入信号的幅值[6],但是不需要相敏检测中的高阶滤波器。
由图2选择变量A(t)、ω(t)和ϕ(t)为状态变量,可以得到新型锁相环系统的状态方程:
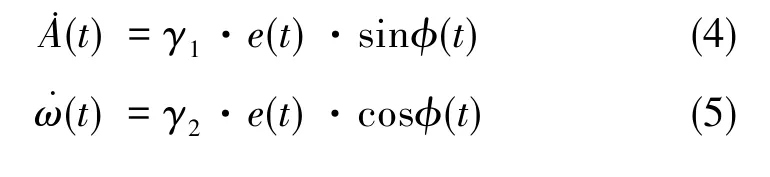
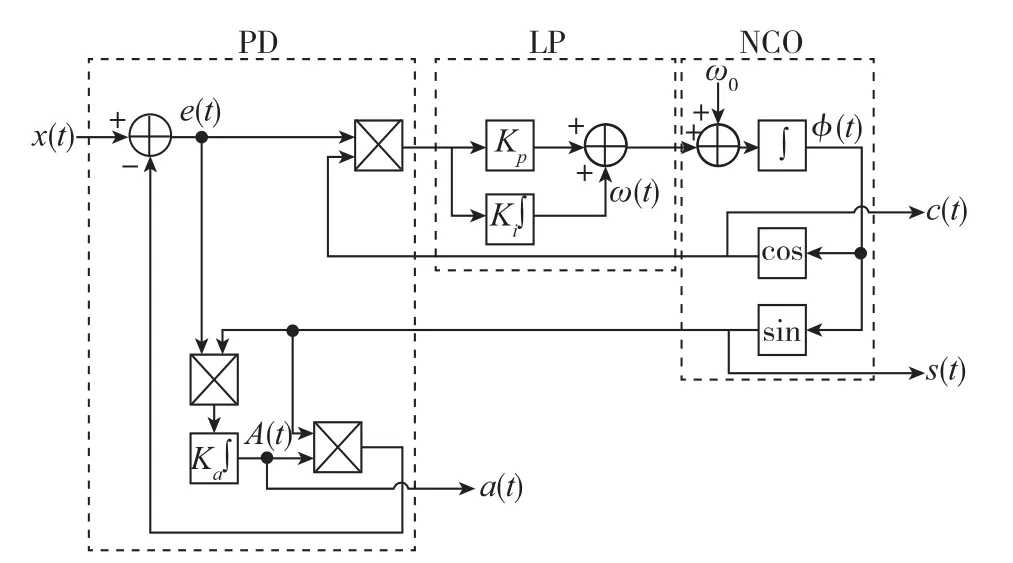
图2 EPLL结构框图Fig.2 The structure of the EPLL

e(t)为信号的瞬态跟踪误差,定义为:

3 数字读出系统
硅微机械陀螺系统由驱动信号通路与检测信号通路构成。驱动信号通路的目的是实现恒幅稳频闭环控制,从而减小温度对陀螺标度因子的影响。检测信号通路的目的就是要得到载体的角速度信息。这两个信号通路都需要对信号进行幅度检波,通常采用相敏解调的方式实现。虽然这种方式可以达到比较好的性能,但是需要设计高性能的滤波器,这势必会增加滤波器的阶数和系统设计的复杂性。针对这个问题,本文基于一种新型锁相环技术,提出了一种新型的数字读出系统,从而省去了相敏检测中的高性能滤波器。这种系统的原理框图如图3所示,其驱动信号通路还是由自动增益控制(AGC)模块和锁相环(PLL)模块进行恒幅稳频闭环控制,减小温度对陀螺标度因子的影响。其检测信号通路以锁相环输出信号的同相与正交分量为参考信号,被解调后得到载体的角速度信号和正交误差信号,由UART上传至上位机实时显示。
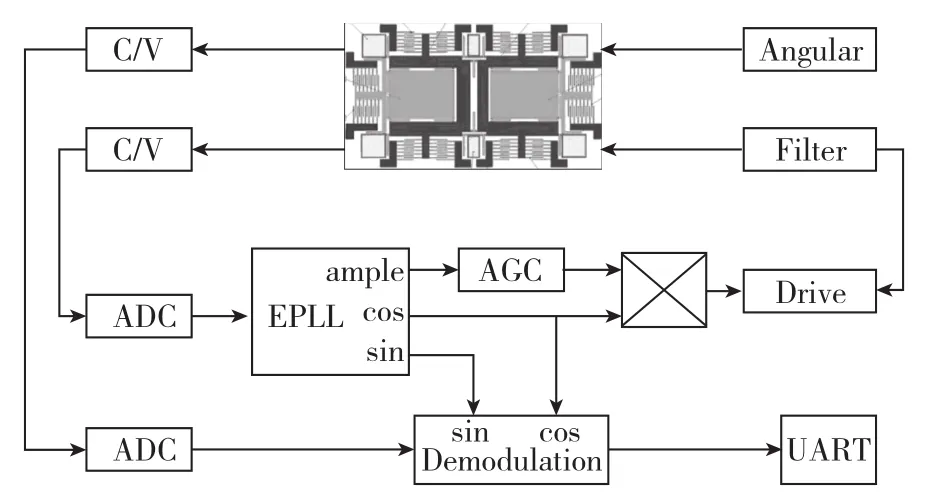
图3 硅微机械陀螺系统原理框图Fig.3 The schematic block diagram of SMG's digital readout system
3.1 驱动模态设计
驱动环路的PLL模块用于实现陀螺驱动模态的相位闭环,使陀螺的驱动模态在外界环境变化时还能保持谐振。为了使陀螺驱动模态谐振频率在保持一定精度的条件下,还能快速起振,本文驱动模态采用了EPLL技术。EPLL的压控振荡器(NCO)采用CORDIC算法实现,使其输出频率分辨率Δf≤0.001Hz[8]。调整EPLL环路滤波器的比例控制系数Kp和积分控制系数Ki使其自然谐振频率ωn在合适的范围内[8]。
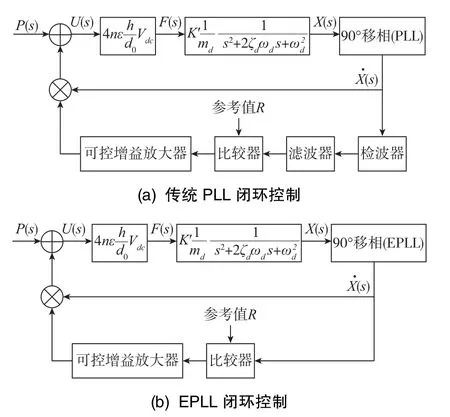
图4 硅微机械陀螺驱动闭环控制方法比较Fig.4 Comparison of SMG's drive control closed⁃loop
驱动环路的AGC模块用于实现陀螺驱动模态的幅度闭环,使陀螺的驱动模态工作在某一个平衡点上,并且当环路受到电源电压、温度以及噪声等干扰时,能在原平衡状态附近建立新的平衡状态,而当干扰消失后,又能回到原平衡状态。传统驱动环路的AGC模块如图4(a)所示,而采用EPLL技术后,原理框图如图4(b)所示。由于EPLL可以提供陀螺驱动模态的振动幅值信息,因此也就不再需要传统AGC模块中的检波器和相应的滤波器,从而简化了陀螺驱动模态的设计。这不仅可以减少数字电路资源,降低功耗,而且更加有利于陀螺与测控电路的集成设计。
3.2 检测模态设计
硅微机械陀螺检测模态是幅度调制信号,调制幅度反映了载体的旋转角速度信息。为了得到该幅度信息,就必须采用相应的解调算法。硅微机械陀螺检测模态一般采用相敏解调,但是相敏解调的输出不仅与输入信号的幅值有关,而且与参考信号的幅值和二者之间的相位差有关。并且硅微机械陀螺仪谐振频率一般比较低,要滤除该二倍频信号则需要高阶低通滤波器,这势必占用大量数字电路资源,增加系统功耗。由式(4)可知,EPLL输出信号与输入信号的瞬态跟踪误差e(t)和EPLL累加相角ϕ(t)的正弦值的积分,可以用来表示输入信号的幅值A(t)。因此,本文采用与驱动模态相同的方法,即采用EPLL技术实现。
4 系统仿真实验
4.1 驱动模态仿真
因为PLL和AGC都为非线性模块,用数学的方法对整个系统进行分析十分困难,因此本文采用Simulink仿真验证系统性能。系统的驱动幅度控制误差在不同参数时的时域波形如图5~图7所示。图5是系统在不同鉴相器积分控制系数Ka时的波形曲线,图6是系统在环路滤波器的比例控制系数Kp不同时的波形曲线,而图7是系统在环路滤波器的积分控制系数Ki不同时的波形曲线。
由图5~图7可知,驱动闭环控制中EPLL鉴相器的积分控制系数Ka和环路滤波器的比例控制系数Kp、积分控制系数Ki,对微机械陀螺的起振速度及驱动敏感信号的幅值精度都有影响。其中,从图5可知驱动幅度控制误差的超调量随Ka的减小而增大,过渡时间随Ka的减小而变长。同时,Ka值的大小直接决定EPLL输出幅值的精度,幅值精度随Ka值的减小而提高,反之亦然。因此在实际中应该折中考虑速度和精度,选择合适的Ka值。从图6可知驱动幅度控制误差的超调量随Kp的增大而减小,过渡时间随Kp的增大而变短。而从图7可知驱动幅度控制误差的超调量随Ki的增大而减小,过渡时间随Ki的增大而变短。同时Kp和Ki还影响驱动环路的增益,驱动环路的增益随Kp和Ki的增大而增大,当增大到一定值时势必会引起驱动环路不稳定而产生振荡。因此,Kp和Ki的值既不能太大又不能太小,也要根据实际折中考虑速度和精度,选择合适的Kp和Ki值。同样,AGC中PI控制器的比例和积分参数的作用与Kp和Ki的作用相同,在此不再重复。
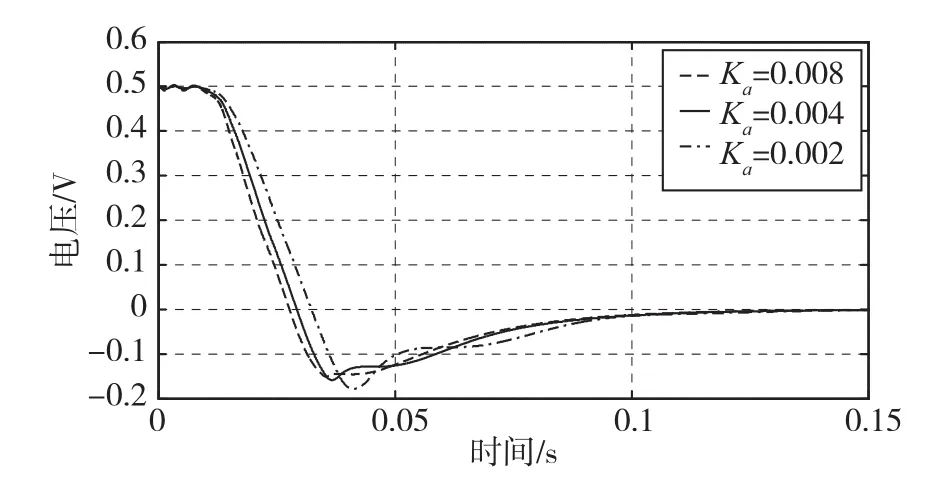
图5 驱动幅度控制误差在不同Ka时的仿真波形Fig.5 The time domain waveforms of the drive amplitude control error with different Ka
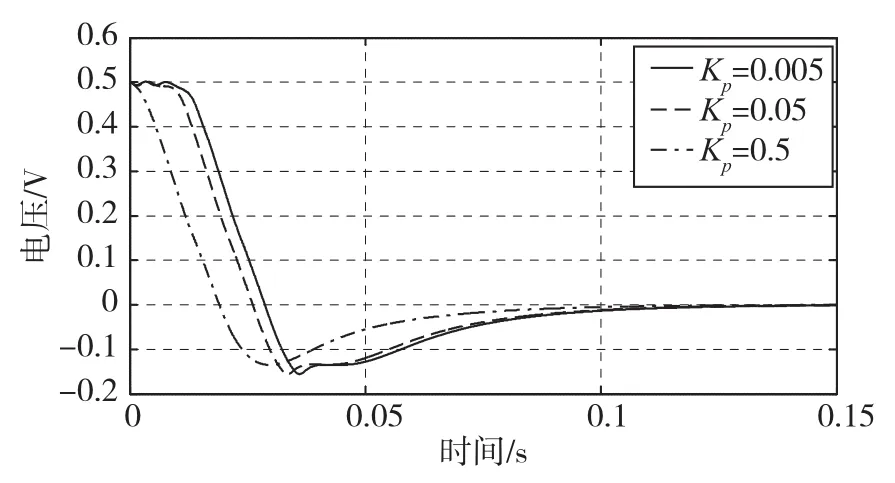
图6 驱动幅度控制误差在不同Kp时的仿真波形Fig.6 The time domain waveforms of the drive amplitude control error with different Kp
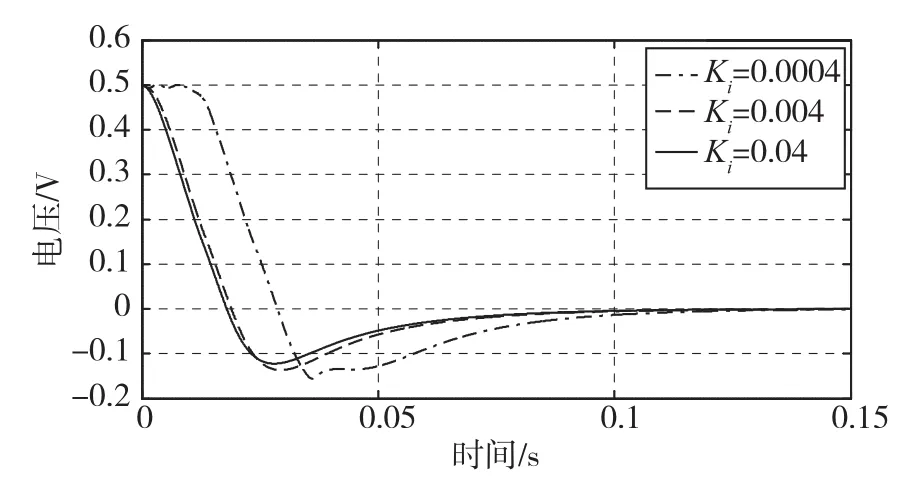
图7 驱动幅度控制误差在不同Ki时的仿真波形Fig.7 The time domain waveforms of the drive amplitude control error with different Ki
4.2 检测模态仿真
为了研究方便,本文检测模态同样采用Simulink仿真验证其性能。检测模态EPLL鉴相器的积分控制系数Ka和环路滤波器的比例控制系数Kp、积分控制系数Ki对微机械陀螺的检测模态的起振速度及载体角速度信号的解调精度都有影响。并且各参数在检测模态中的作用与其在驱动模态中的作用相同,因此不再重复。图8是检测模态在不同角速度输入条件时,输出信号的时域波形。
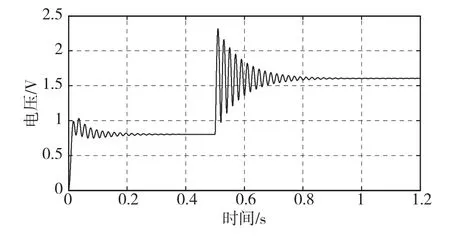
图8 检测模态输出信号时域波形图Fig.8 The time domain waveforms of the outputs with different angular velocity inputs
5 结论
本文设计的基于EPLL技术的数字闭环驱动与解调方案,通过仿真实验验证,得到了满意的结果,为今后微机械陀螺系统的实现与性能的进一步提高奠定了基础。
[1]Chang B S,Lee J G,Kang T,et al.Design and perform⁃ance analysis of PLL based self oscillation loop in vibrating gyroscope[C].Mechatronics,MEMS,and Smart Materials(ICMIT),United States:Proceedings of SPIE Int Soc Opt Eng,2005,6040:7⁃12.
[2]Wang Y L,Han S W,Li H S,et al.Research and test of the digital phase locked loop drive technology for silicon micro⁃machined gyroscope[C].MEMS,NANO and Smart Systems(ICMENS).Switzerland:Proceedings of Trans Tech Publications(TTP)⁃Advanced Materials Research(AMR),2012,403⁃408:4252⁃4259.
[3]盛平.硅微机械谐振式陀螺仪测控技术研究[D].东南大学,2009. SHENG Ping.Research of the control technology for silicon micro⁃machined resonant gyroscope[D].Southeast University,2009.
[4]Wang Y L.Research and test of the adaptive quadrature demodulation technology for silicon micro⁃machined gyro⁃scope[J].Journal of Harbin Institute of Technology,2012,19(5):118⁃122.
[5]Karimi⁃Ghartemani M,Iravani M R.A method for syn⁃chronization of power electronic converters in polluted and variable⁃frequency environments[J].IEEE Transactions on Power Systems,2004,19(3):1263⁃1270.
[6]Karimi⁃Ghartemani M,Boon⁃Teck O,Bakhshai A.Appli⁃cation of enhanced phase⁃locked loop system to the com⁃putation of synchrophasors[J].IEEE Transactions on Power Delivery,2011,26(1):22⁃32.
[7]Karimi⁃Ghartemani M,Mojiri M,Safaee A,et al.A new phase⁃locked loop system for three⁃phase applications[J]. IEEE Transactions on Power Electronics,2013,28(3):1208⁃1218.
[8]王玉良.基于CORDIC算法的PLL在FPGA中的实现[J].计量学报,2012,33(3):259⁃265. WANG Yu⁃liang.FPGA implementation of PLL based on CORDIC algorithm[J].Acta Metrologica Sinica,2012,33(3):259⁃265.
[9]王寿荣.硅微型惯性器件理论及应用[M].南京:东南大学出版社,2000. WANG Shou⁃rong.Theory and application of Silicon micro⁃inertial devices[M].Nanjing:Southeast University Press,2000.
A New Digital Readout System for Silicon Micro⁃machined Gyroscope
WANG Yu⁃liang,ZHENG Xu⁃dong,ZENG Qing⁃lin,XING Chao⁃yang
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
In order to simplify the system design,and further improve the control performance of the silicon micro⁃machined gyroscope(SMG),a new digital readout system program of the SMG is proposed.In this program,EPLL and AGC technologies are adopted to achieve the closed⁃loop control of the phase and amplitude of SMG's drive mode and EPLL is used for signal demodulation of SMG's detection mode,which has not only reduced the constraints of SMG's quality fac⁃tor,but also eliminated the low⁃pass filter that has to be used for conventional programs.Simulation results not only verify the feasibility of the program,but also demonstrate the correlation between EPLL's parameters and the digital readout system performance of the SMG.This program lays the foundation for the further improvement of the SMG's system perform⁃ance and the implementation of the SMG system's self⁃calibration and self⁃demarcation in future.
silicon micro⁃machined gyroscope;closed⁃loop drive;digital phase⁃locked loop;demodulation
TP21
A
1674⁃5558(2017)02⁃01249
10.3969/j.issn.1674⁃5558.2017.01.010
王玉良,男,博士,研究方向为MEMS陀螺及医用超声信号处理。
2016⁃03⁃08