基于嵌入式平台的MEMS/GPS组合导航系统实现研究
2017-03-06许建新孔雪博
黄 欣,许建新,孔雪博,熊 智
(南京航空航天大学导航研究中心,南京211106)
基于嵌入式平台的MEMS/GPS组合导航系统实现研究
黄 欣,许建新,孔雪博,熊 智
(南京航空航天大学导航研究中心,南京211106)
主要研究基于PC104平台的MEMS/GPS组合导航系统硬件实现方法。首先设计了对MTi⁃30 MEMS器件与GPS接收机的数据采集软件,基于统计分析方法分析建立了传感器的误差模型参数,构建了MEMS/GPS组合算法模型,基于MEMS惯性器件和GPS接收机实测数据确定了Kalman滤波器的系统噪声阵及量测噪声阵模型参数;然后利用实际测量数据进行了MEMS/GPS组合系统导航性能仿真;最后基于PC104嵌入式平台,构建了MEMS/GPS组合导航系统原理样机,分别在静态和动态情况下完成MEMS/GPS组合导航算法实时测试,导航结果验证了硬件平台及导航算法的正确性。
MTi⁃30;组合导航;PC104平台;Kalman滤波
0 引言
MEMS(Micro Electro Mechanical System)惯性传感器是指采用微电子加工技术,由硅或石英为主要材料制成的芯片级的惯性传感器[1]。虽然体积较小,功耗少,但是与其他惯性传感器相比,MEMS依旧具有较低的元件精度、较差的稳定性能等缺点[2⁃3]。更主要的是,推算式的捷联导航结果误差会随着时间的增长而迅速累积。全球定位系统能实现三维度的实时定位,导航定位的全球性和高精度,测站间无需通视、省时、快速、高效率、可移动定位和应用范围广[4],并且误差不会随着时间增长累积。因而,MEMS/GPS组合导航系统相互取长补短[5],对比单个系统,组合导航精度和性能得到了显著提升。
本文主要研究MTi微惯性航姿系统与GPS组合导航技术,并在PC104嵌入式平台基础之上,构建MEMS/GPS组合导航系统原理样机。针对MTi⁃30 MEMS器件与GPS接收机,设计相关数据采集软件,研究利用统计学方法估算传感器误差模型参数,并利用实测数据验证模型参数在MEMS/GPS组合算法模型中的适应性。同时,基于PC104平台,搭建组合导航系统样机,验证硬件平台的可用性以及导航算法的精准性,设计出整套精准组合导航设备仪器。
1 低成本MEMS/GPS组合导航系统实现总体设计
1.1 低成本MEMS/GPS组合导航系统组合导航方案设计
低成本MEMS/GPS组合导航系统在实现时选取松组合方式[6],系统工作原理如图1所示。
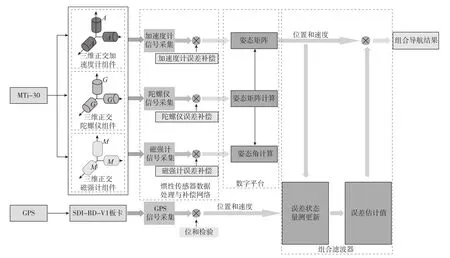
图1 速度、位置组合Fig.1 Combination of velocity and position
其中,惯性传感器数据处理与补偿网络设计了MTi⁃30数据采集软件,并研究了在线实时标定和零偏补偿的方法,弥补了MEMS长时间误差漂移较大的问题;数字平台模块凭借加速度计、陀螺仪与磁强计采集的数据,设计了实时解算速度位置与姿态的算法,同时研究了磁异常判别机制;组合滤波器模块设计了一种有效的GPS实时辅助MEMS的最优滤波算法,提升了组合导航定位精度。
1.2 低成本MEMS/GPS组合导航Kalman滤波器模型设计
在MEMS/GPS组合导航系统中,选取9个误差参数作为状态,包括3个平台角误差、3个速度与3个位置误差[7]。同时,选取陀螺随机常数、1阶马尔可夫过程与加速度计的1阶马尔可夫过程作为另外的9个状态量,可得18阶系统状态方程。本文采用速度位置松组合方式[8]。
2 MEMS/GPS组合导航系统性能测试验证
2.1 MEMS/GPS组合导航系统设计与实现
(1)系统硬件结构设计与研究
本系统采用荷兰Xsens公司生产的MTi⁃30惯性器件以及SDI⁃TimeNav型GPS接收机,基于PC104嵌入式平台,构建MEMS/GPS组合导航系统原理样机。其中研究利用MTi⁃30及GPS接收机设计了相关数据采集软件采集相关信息,研究利用PC104嵌入式平台完成组合导航定位功能。
图2和图3为搭建的MEMS/GPS组合系统实现硬件仿真平台。其中上位机通过VC++6.0编写,可以设置纯捷联、MEMS/GPS组合等多种方式。

图2 物理实现图Fig.2 Physical implementation

图3 物理显控显示图Fig.3 Display of physical implementation
(2)系统软件设计与研究
整个系统的软件设计主要包括惯性传感器与GPS数据处理与补偿网络的设计以及组合导航算法设计。
①数据处理与补偿网络的设计
该网络由数据采集与数据处理两部分组成。数据采集模块包括系统初始化、数据读入和检测、数据解算以及数据输出部分,程序流程如图4所示。

图4 数据采集与处理流程图Fig.4 Flowchart of data acquisition and processing
继IMU数据串口初始化,实时采集IMU数据,并进行数据包的头校验与尾校验,如果验证正确,则将数据解算后的值传输给PC104进行实时导航解算并通过RS232串口传输到文件中保存;继GPS数据串口初始化之,实时采集GPS数据,进行位和校验并剔除异常值,通过RS232串口实时保存到文件中。数据处理模块主要研究传感器零偏标定以及磁传感器的异常处理。在初始时刻,静止状态下采集半分钟IMU数据,均值作为陀螺仪零偏;利用二位椭圆标定算法对磁传感器数据进行标定,提高航向角精准度,在静态下,对当前磁航向角与航向均值偏差超过一定阈值时进行剔除。
②组合导航算法设计
该网络研究捷联惯导算法,实时解算获取速度、位置与姿态信息,同时研究利用Kalman滤波器,通过GPS辅助修正MEMS,以提高组合导航定位的精度,程序流程如图5所示。研究利用GPS有效时,利用Kalman滤波器估算速度位置误差,补偿MEMS发散;研究利用GPS无效时,只进行一步预测更新,不对MEMS作出修正。研究利用这种滤波器网络,来保证MEMS长时间的位置精度。
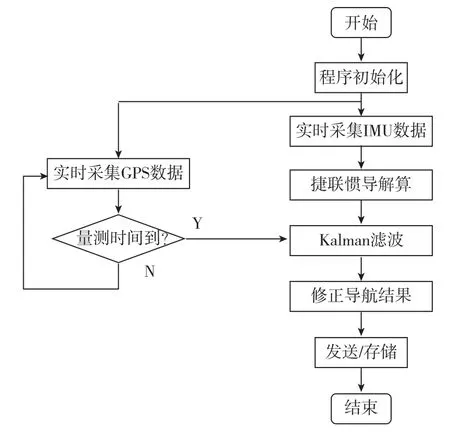
图5 组合导航算法流程图Fig.5 Flowchart of integrated navigation algorithm process
2.2 MEMS/GPS组合系统性能测试
基于上文的系统结构与软硬件实现,进行了系统软硬件调试并实现了组合系统的测试研究。
(1)MTi⁃30/GPS惯性传感器数据采集与分析
为确定Kalman滤波器中系统噪声阵的状态模型误差参数,测试采集了MTi⁃30传感器和GPS的静态数据。将传感器固定于手摇转台上,并将转台调整到水平位置,采集10组静态数据,频率为50Hz,每次时长约40min。
静态数据均值反映了传感器零偏大小,均方差反映了误差偏离程度,将采集的原始数据基于统计分析按1s、10s分别求取平均及均方差值来分析传感器与GPS的性能。
MTi⁃30静态数据如表1、表2所示。

表1 1s平均均值及均方差Table 1 Mean and mean square error in 1 second
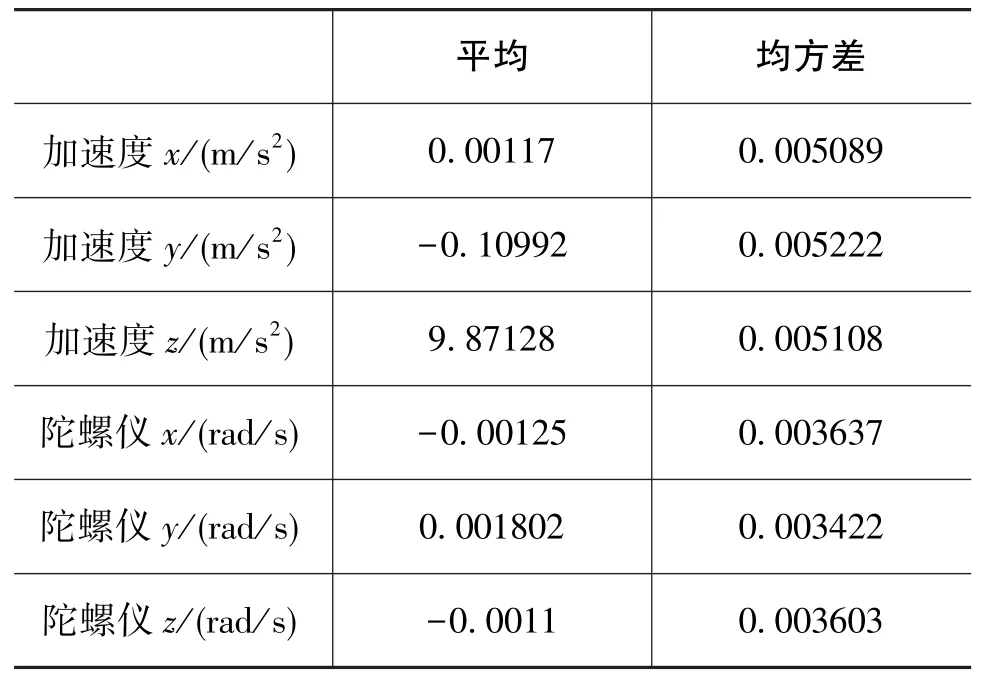
表2 10s平均均值及均方差Table 2 Mean and mean square error in 10 second
GPS静态数据如表3所示。
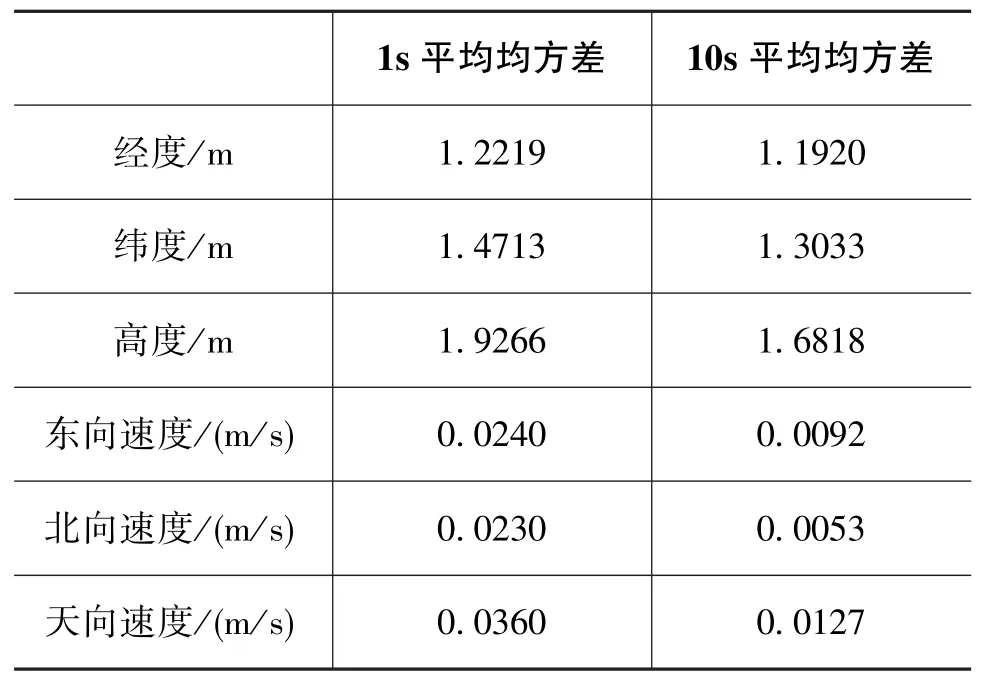
表3 GPS静态数据均方误差Table 3 Mean square error of GPS
从上述结果中,可以得到以下3个结论:
1)传感器三轴加速度误差数量级在0.01m/s2左右,三轴角速度误差数量级大约在0.001rad/s;
2)单源GPS位置误差在2m左右;
3)观测均方差,数据误差小,重复性好,可接受程度较高。
(2)参数设置
在Kalman滤波器设计中,Q阵与R阵的参数设定对滤波精度影响最大,根据2.1节测试获得的惯性器件与GPS的性能参数为基础,依据传感器静态均值设置三轴加计零偏,R阵依据GPS均方差平方设置,Q阵依据传感器均方差平方进行设置,最终通过Matlab仿真的方式,对比不同参数下的导航误差大小,对上述参数进行微调,确定了表4中的Kalman滤波参数。

表4 参数设置Table 4 Parameters setting
(3)基于PC104硬件平台的仿真验证
基于搭建的MEMS/GPS组合系统实现硬件仿真平台,仿真参数按表4取值,分别进行静态和动态测试。
图6、图7为静态测试结果。
静态情况下,观测上述曲线,GPS天向速度趋近于0,近乎直线,GPS东北向速度受限于硬件影响,存在稍小跳动。同时,受限于平台误差角的影响,最终经纬误差在1.5m左右。

图6 速度对比曲线(静态)Fig.6 Comparison of velocity(statics)
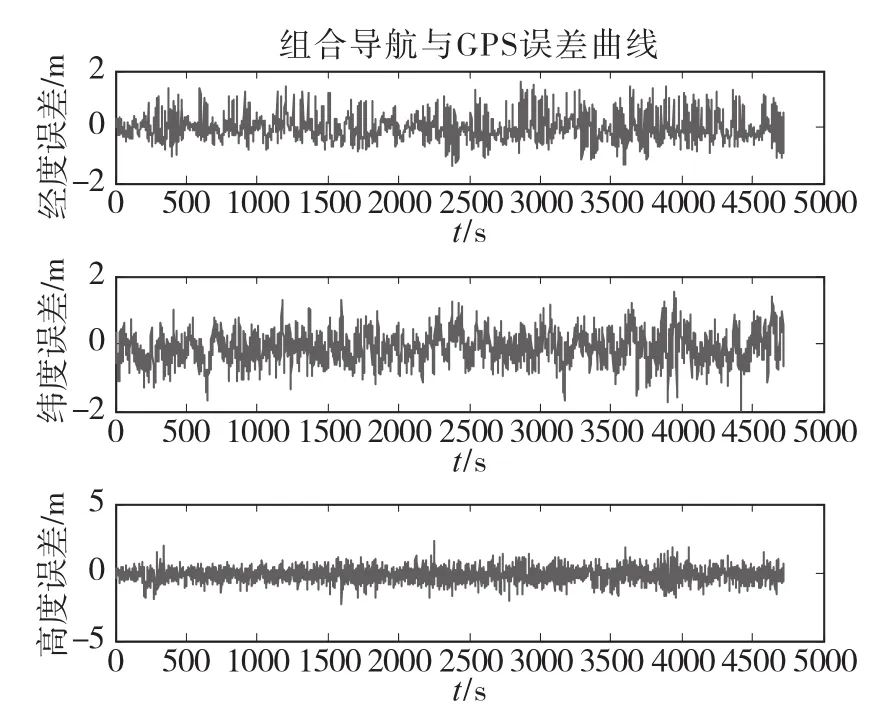
图7 位置对比曲线(静态)Fig.7 Comparison of location(statics)
图8~图11为动态测试结果,测试场地为学校操场。

图8 速度对比曲线(动态)Fig.8 Comparison of velocity(dynamic)
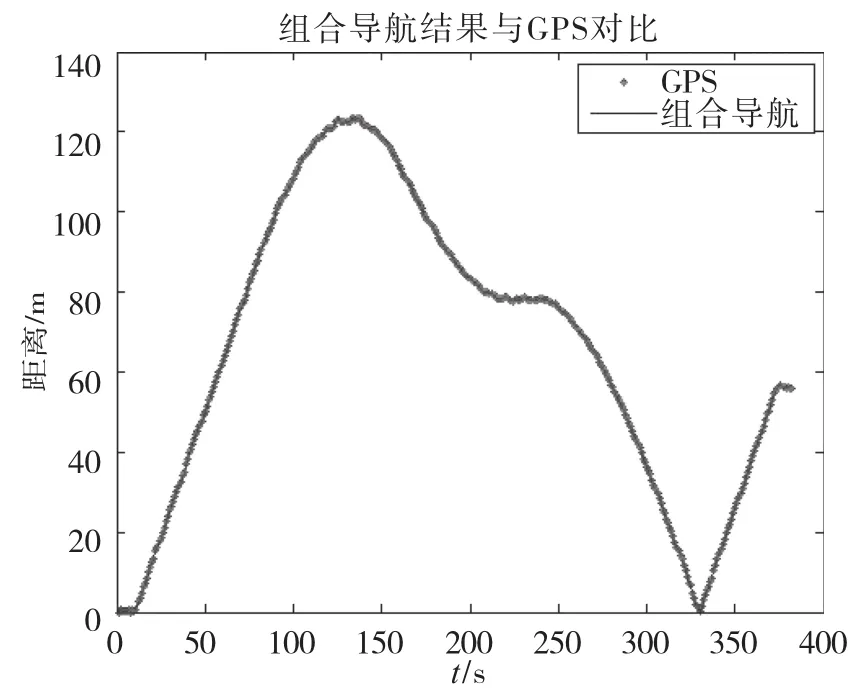
图9 位置对比曲线(动态)Fig.9 Comparison of location(dynamic)

图10 导航结果与GPS对比二维图Fig.10 2D results between navigation and GPS
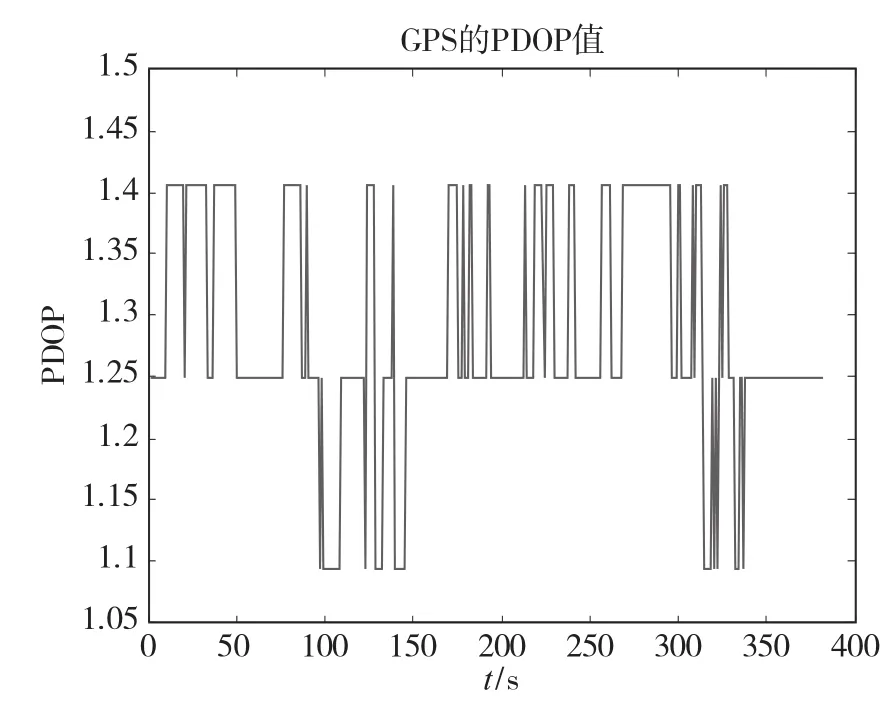
图11 GPS的PDOP值Fig.11 PDOP value of GPS
观测上述曲线,可以发现:经度误差不超过1m,纬度误差大体在1m以下,高度误差一般在2m以内。总体而言,导航结果较好。
图12为将导航结果导入Google Earth中三维路线图,组合导航精度较好,标志了MEMS/GPS组合导航程序的良好性。

图12 导航结果的Google Earth图Fig.12 Navigation results in Google Earth
3 结论
本文针对MTi⁃30 MEMS器件与GPS接收机设计了相对应的数据采集软件,为数据采集与分析提供了有利条件,大大缩短工程研究时间。研究了用于估算传感器误差模型参数的统计分析方法,为构建MEMS/GPS组合算法模型提供有力依据。研究了MEMS/GPS组合导航算法并基于PC104平台,构建了MEMS/GPS组合导航系统原理样机,为相关部门针对不同环境下的组合导航定位提供强有力的工具,其将在工程实际中得到广泛的应用。
[1]Tawk Y,Tomé P,Botteron C,et al.Implementation and performance of a GPS/INS tightly coupled assisted PLL architecture using MEMS inertial sensors[J].Sensors,2014,14(2):3768⁃3796.
[2]王淑华.MEMS传感器现状及应用[J].微纳电子技术,2011,48(8):516⁃522. WANG Shu⁃hua.Current situation and application of MEMS sensors[J].Micronanoelectronic Technology,2011,48(8):516⁃522.
[3]Quinchia A G,Falco G,Falletti E,et al.A comparison be⁃tween different error modeling of MEMS applied to GPS/INS integrated systems[J].Sensors,2013,13(8):9549⁃9588.
[4]Hølge⁃Hazelton B,Tulinius C.Individual development of professionalism in educational peer group supervision:a multiple case study of GPS[J].International Journal of Family Medicine,2012(434):792018.
[5]蔡春龙,刘翼,刘一薇.MEMS仪表惯性组合导航系统发展现状与趋势[J].中国惯性技术学报,2009,17(5):562⁃567. CAI Chun⁃long,LIU Yi,LIU Yi⁃wei.Current situation and the trend of development of the MEMS inertial inte⁃grated navigation system instrument[J].Journal of Chinese Inertial Technology,2009,17(5):562⁃567.
[6]谢非,刘建业,李荣冰,等.基于环路相关积分观测的SINS/GPS深组合导航算法[J].中国惯性技术学报,2013(4):472⁃477. XIE Fei,LIU Jian⁃ye,LI Rong⁃bing,et al.SINS/GPS in⁃tegrated navigation algorithm based on the correlation inte⁃gral loop observation.[J].Journal of Chinese InertialTechnology,2013(4):472⁃477.
[7]LIU Lin,WANG Er⁃kang,ZHANG Xiao⁃yang,et al. MEMS⁃based 3D confocal scanning microendoscope using MEMS scanners for both lateral and axial scan.[J]. Sensors Actuators A Physical,2014,215(16):89⁃95.
[8]华冰,刘建业,李荣冰,等.余度MEMS⁃IMU/GPS组合导航系统[J].南京航空航天大学学报,2007,39(5):570⁃575. HUA Bing,LIU Jian⁃ye,LI Rong⁃bing,et al.Redundant of MEMS⁃IMU/GPS integrated navigation system[J]. Journal of Nanjing University of Aeronautics&Astronau⁃tics,2007,39(5):570⁃575.
Physical Implementation of MEMS/GPS Integrated Navigation Based on the Embedded Platform
HUANG Xin,XU Jian⁃xin,KONG Xue⁃bo,XIONG Zhi
(Nanjing University of Aeronautics and Astronautics,Nanjing 211106)
This paper mainly studied the MEMS/GPS integrated navigation system based on PC104.Firstly,we de⁃signed the software for MTi⁃30 MEMS devices and GPS receiver data acquisition.Statistical analysis method was used to establish error model parameters of the sensor and MEMS/GPS combination algorithm model was constructed.Based on the measured data of MEMS inertial device and GPS receiver,we determined the parameters of system noise and measurement noise matrix of Kalman filter.Then the MEMS/GPS integrated navigation system was studied by using the actual measure⁃ment data.Finally,in the static and dynamic case,built on the PC104 platform,real⁃time integrated navigation was tested and the correctness and precision of the integrated navigation program was verified.
MTi⁃30;integrated navigation;PC104 platform;Kalman filter
V249.32+8
A
1674⁃5558(2017)01⁃01280
10.3969/j.issn.1674⁃5558.2017.01.003
黄欣,男,硕士,研究方向为惯性技术及组合导航研究。
2016⁃06⁃01
国家自然科学基金项目(编号:61533008,61374115);中央高校基本科研业务费专项资金(编号:NP2015406,NJ20150012,NP20152212,NS2014031)