基于模型参考自适应的电动车用永磁同步电动机无速度传感器控制系统研究
2017-03-03赵金越胥德龙高晓曦
赵金越 关 新 胥德龙 高晓曦
(沈阳工业大学,沈阳 110870)
基于模型参考自适应的电动车用永磁同步电动机无速度传感器控制系统研究
赵金越 关 新 胥德龙 高晓曦
(沈阳工业大学,沈阳 110870)
本文针对车用永磁同步电动机驱动系统的特点,提出了新的基于定子电流的模型参考自适应的电动车用永磁同步电动机无传感器控制方法,建立了电流参考模型与可调模型,将两模型输出的差经过自适应机构和合适的自适应律来实时调节可调模型中的参数,从而实现电动机的转速和位置的参数辨识。在Matlab/Simulink环境下对系统进行了仿真研究和结果分析,表明基于模型参考自适应的电动车用永磁同步电动机无传感器控制方法有良好的电机参数辨识和动静态效果。
永磁同步电动机;矢量控制;模型参考自适应;无位置传感器控制
永磁同步电动机凭借其损耗小、效率高、结构简单等优点已逐渐成为调速系统中广泛应用的控制对象。永磁同步电动机相比于异步电动机有更快的响应速度、更高的功率密度、更低的损耗和更高的效率,广泛应用于电动汽车驱动电机[1],如宝马的i3、特斯拉Model-S以及比亚迪E6。永磁同步电动机的精确控制需要转子的位置信息,而位置或速度传感器的安装增加了电机的体积和成本,增加了转轴的惯量,影响了系统的动静态性能,降低了系统的鲁棒性能,限制了电动机的应用场合。为了克服传感器给调速系统带来的缺点,对于PMSM无速度传感器的研究已成为了当前PMSM驱动系统研究的热点之一[2]。
现阶段对PMSM无速度传感器研究采用的方法有反电势估计、扩展卡尔曼滤波、滑模观测器、高频注入、模型参考自适应等[3]。由于模型参考自适应法是基于稳定性设计的参数辨识方法,能保证参数估计的渐进收敛,具有良好的动态性能以及精度高、控制相对简单的特点[4],所以本文采用基于模型参考自适应(MRAS)的电动车用永磁同步电动机无速度传感器控制系统进行研究,建立了参考模型与可调模型,将两模型输出的差经过合适的率来实时调节可调模型中的辨识参数,通过对转速自适应律的推导,得到电动机相应的辨识参数。
1 隐极式永磁同步电动机d-q轴系下的数学模型
永磁同步电动机在 d-q坐标系下定子电压、等效电感及其磁链方程如下:
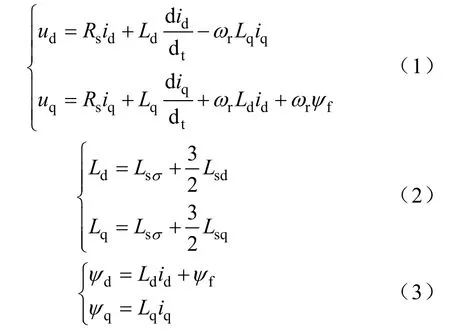
式中,ωr为转子的电角速度,Rs为定子电阻,Ld、Lq为d、q轴电感,ud、uq为d、q轴电压,id、iq为d、q轴电流,ψd、ψq为d、q轴磁链,ψf为永磁体磁链。
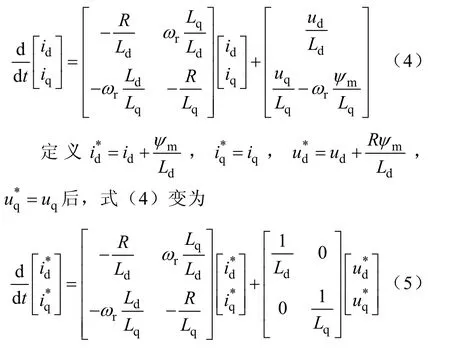
由上式可得矩阵:
2 基于模型参考自适应的PMSM无位置传感器控制系统
2.1 模型参考自适应控制系统原理
模型参考自适应控制方案通过引入一个有较好性能的预期参考模型,将实际系统的输出或状态与参考模型的信号进行比较,通过得出的误差信号去驱动自适应机构,调节控制器的参数,达到控制的目的[5]。基于以上基本原理得出的基于 MRAS的PMSM无位置传感器控制系统原理图如图1所示。
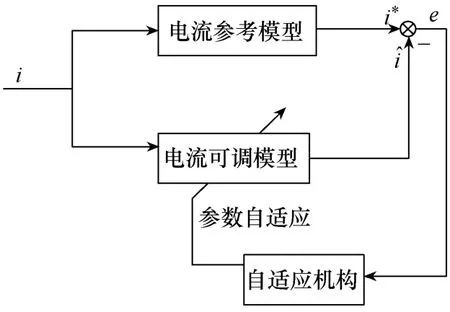
图1 模型参考自适应原理图
2.2 无速度传感器PMSM自适应控制模型
用PMSM方程作为参考模型,定子电流方程作为可调模型。由式(5)可得
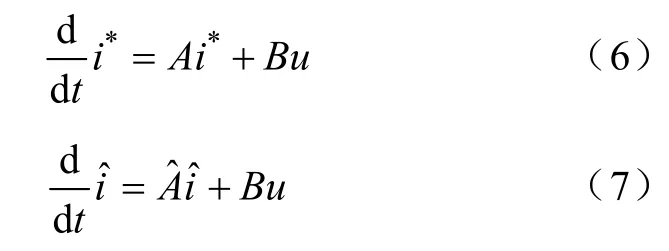
式(6)为参考模型,式(7)为可调模型。
根据Popov超稳定理论,其结构图如图2所示。
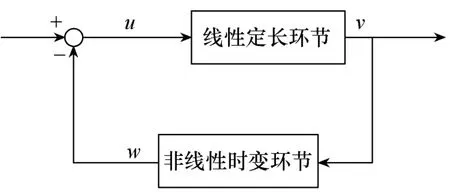
图2 非线性时变系统
该系统包括一个正向线性定常环节和一个非线性时变反馈环节,如果能保证正向的传递函数为正实函数,通过这种超稳定性理论得到的反馈环节就可使系统保持稳定[6]。因此,若想使如上系统具有超稳定性,则必须满足如下条件:
(1)正实性定理:线性定长环节的传递函数矩阵G(s)=J+C(sI−A)−1B严格正实。
(2)非线性时变环节满足Popov积分不等式。
对于条件(1),通过式(8)可得
由上式可判断G(s)严格正实。
对于条件(2),要求系统的非线性时变环节必须满足Popov积分不等式:

式中,∀t0≥0,为任意有限正数。
将v和w代入Popov积分不等式,并对其进行逆向求解以获得自适应律。

可取为如下比例积分形式:

由式(13)、式(14)可得


根据不等式:
这里可以取

由上式求导可得
由上可证条件(2)满足Popov积分不等式。
由以上可推导出自适应律为
2.3 系统整体框图
由以上推导出的MRAS自适应律来估算出永磁同步电动机的转子速度和位置,取代了传统机械式位置传感器,来实现矢量控制系统的稳定运行。基于MRAS的永磁同步电动机无位置传感器矢量控制系统整体框图如图3所示。
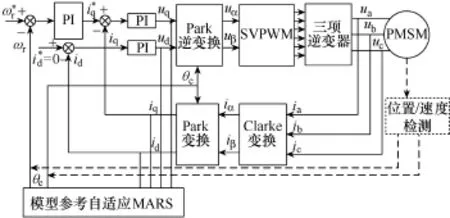
图3 系统整体框图
3 仿真分析
根据以上建立的系统整体框图在 Matlab/ Simulink环境下搭建控制系统模型如图4所示。
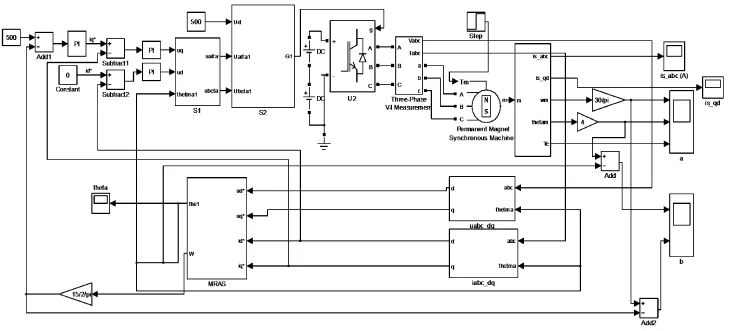
图4 基于MRAS的无传感器控制系统仿真模型
永磁同步电动机额定电压为500V,定子电阻为2.875Ω,转子磁链为0.175Wb,极对数为4,d轴和q轴电感均为 8.5mH。初始状态下空载给定转速500r/min,在0.2s时转速突变为1500r/min,在0.3s时突加5N·m负载,仿真共运行0.4s。
由以上模型运行仿真后仿真结果如图 5和图 6所示。
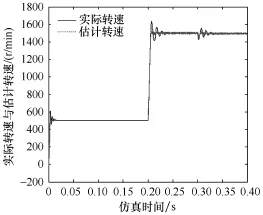
图5 实际转速与估计转速的关系
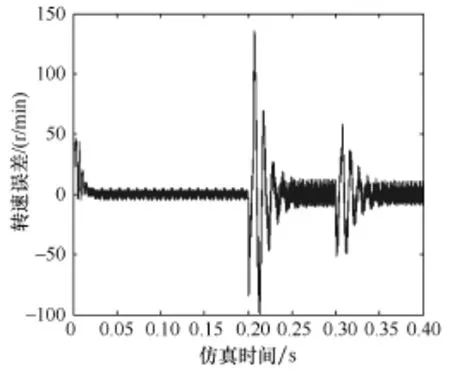
图6 转速误差
由仿真结果可看出,在启动阶段、低速段以及高速段转速误差都比较小,估计转速能较好地跟随实际转速,在转速突变时有较小波动并很快跟随实际转速。
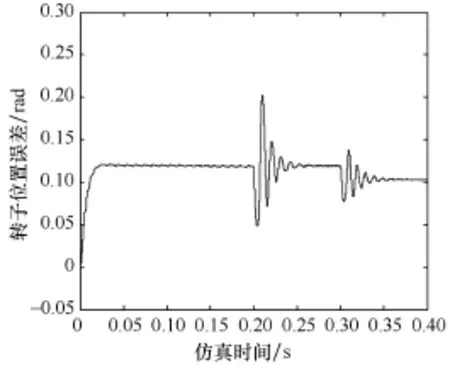
图7 转子位置误差
估算转子转角位置与实际位置较为相近,误差在0.1rad左右。
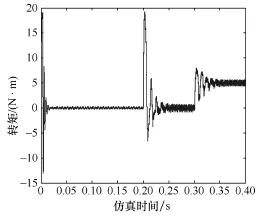
图8 转矩特性
4 结论
由以上仿真结果表明,估算的转速可以很好地跟踪电动机的实际转速,估算精度也能满足电动车用矢量控制系统的要求。在电动机的起动阶段和转速、转矩突变的阶段转速估算误差稍大,在MRAS自适应律的作用下误差降低并得到很快收敛,达到较好的稳定状态。综上所述,本文采用的基于MRAS模型参考自适应的无位置传感器永磁同步电动机矢量控制系统,能实现较好的控制效果,为下一步对永磁同步电动机无位置传感器控制系统进行深入研究打下了良好的基础。
[1]Mihai Comanescu.Rotor position estimation of PMSM by sliding mode EMF observer under improper speed [J].Industrial Electronics,2010,11:1474-1478.
[2]Yukinori lnoue,Shigeo Morimoto,Masayuki Sanada.Comparative study of PMSM drive systems based on current control and direct torque control in fluxweakening control region[C]//International Electric Machines &Drives Conference of IEEE,2011:1094-1099.
[3]王添羡,林荣文.基于滑模观测器的无位置传感器永磁同步电机转角转速计算[J].电气技术,2014(3):41-45.
[4]张瑞峰,于森林,刘婷,等.基于模型参考自适应的永磁同步电机在线参数辨识方法研究[J].机车电传动,2015(2):71-76.
[5]薛定宇.控制系统计算机辅助设计-MATLAB语言与应用[M].北京:清华大学出版社,2012.
[6]周彬,段广仁.离散传递函数正实性与连续传递函数有限频率正实性的代数判据[J].自动化学报,2009,35(5):561-567.
Research on Sensorless Vecor Control Strategy of Permanent Magnet Synchronous Motor based on Model Reference Adaptive for Electric Vehicle
Zhao Jinyue Guan Xin Xu Delong Gao Xiaoxi
(Shenyang University of Technology,Shenyang 110870)
According to the vehicle permanent magnet synchronous motor drive system features,this paper proposes the new speed sensorless vecor control strategy of permanent magnet synchronous motor based on model reference adaptive of the stator current for electric vehicle.The reference model and adjustable model of the current are constructed,and the difference between the two model outputs is adjusted by the adaptive mechanism and the adaptive rate to adjust the parameters of the model in real time,so as to realize the parameter identification of the speed and position of the motor.In the design environment of Matlab/Simulink,the simulation study and result analysis of the system shows that the new speed sensorless vecor control strategy of permanent magnet synchronous motor for electric vehicle based on model reference adaptive has a good effect on motor parameter identification and dynamic,static performance.
PMSM;vector control;MRAS;sensorless
赵金越(1992-),男,沈阳工业大学电气工程学院,硕士,主要研究方向为电机与电器。
