多旋翼飞行器控制系统实验平台的开发
2017-03-02王永锟周玉臣
方 可, 王永锟, 周玉臣
(哈尔滨工业大学 控制与仿真中心, 黑龙江 哈尔滨 150080)
计算机技术应用
多旋翼飞行器控制系统实验平台的开发
方 可, 王永锟, 周玉臣
(哈尔滨工业大学 控制与仿真中心, 黑龙江 哈尔滨 150080)
为了让本科生充分理解和掌握知识,直观地感受自己设计的控制律在实物上运作的效果,以及完成在飞行测试之前的地面实验,开发了一套基于双旋翼天平的多旋翼飞行器控制系统的实验平台,解决了倾角识别、电机调速、控制律验证等方面的问题,采用基于Mega8L单片机、SCA60C倾角传感器、2212无刷马达以及PID控制律的系统架构,保证了系统具有良好的实时性和稳定性。
多旋翼飞行器; 双旋翼天平; 控制系统; 实验平台
近年来,多旋翼飞行器[1-2]在航拍、电力巡线、警用、娱乐等众多场合得到了应用,其中四旋翼飞行器[3-4]是最常见的一种。由于成本相对较低、飞行控制系统容易实现,学生普遍对该类飞行器有很高的兴趣,希望能掌握其飞行控制系统的设计与实现方法。
多旋翼飞行器控制系统实验平台提供了一个基于双旋翼天平的地面实验设备,通过SCA60C倾角传感器[5]实时监测天平横臂角度,并利用Mega8L单片机结合PID控制律[6]调节无刷电机转速来维持天平的水平。本实验平台为多旋翼飞行器在实际飞行前提供了地面实验的解决方案。
1 实验平台的总体结构
多旋翼飞行器控制系统实验平台总体结构包括:
(1) 天平平衡臂及支撑框架,用于模拟多旋翼飞行器在一个旋转轴上的姿态;
(2) 无刷马达及螺旋桨,无刷马达带动螺旋桨产生升力;
(3) 无刷电子调速器,用于调节马达转速;
(4) SCA60C倾角传感器,用于感知天平平衡臂的倾角;
(5) 含有Mega8L单片机的控制器,用于输出控制信号、维持天平水平;
(6) 12 V和 5 V开关电源[7]。
图1为多旋翼飞行器控制系统实验平台组成框图。学生利用该实验平台,不仅能了解飞行器控制系统的架构,也获得了一个在实际飞行前的地面实验设备,有助于系统调试、增加控制器设计的成功率。
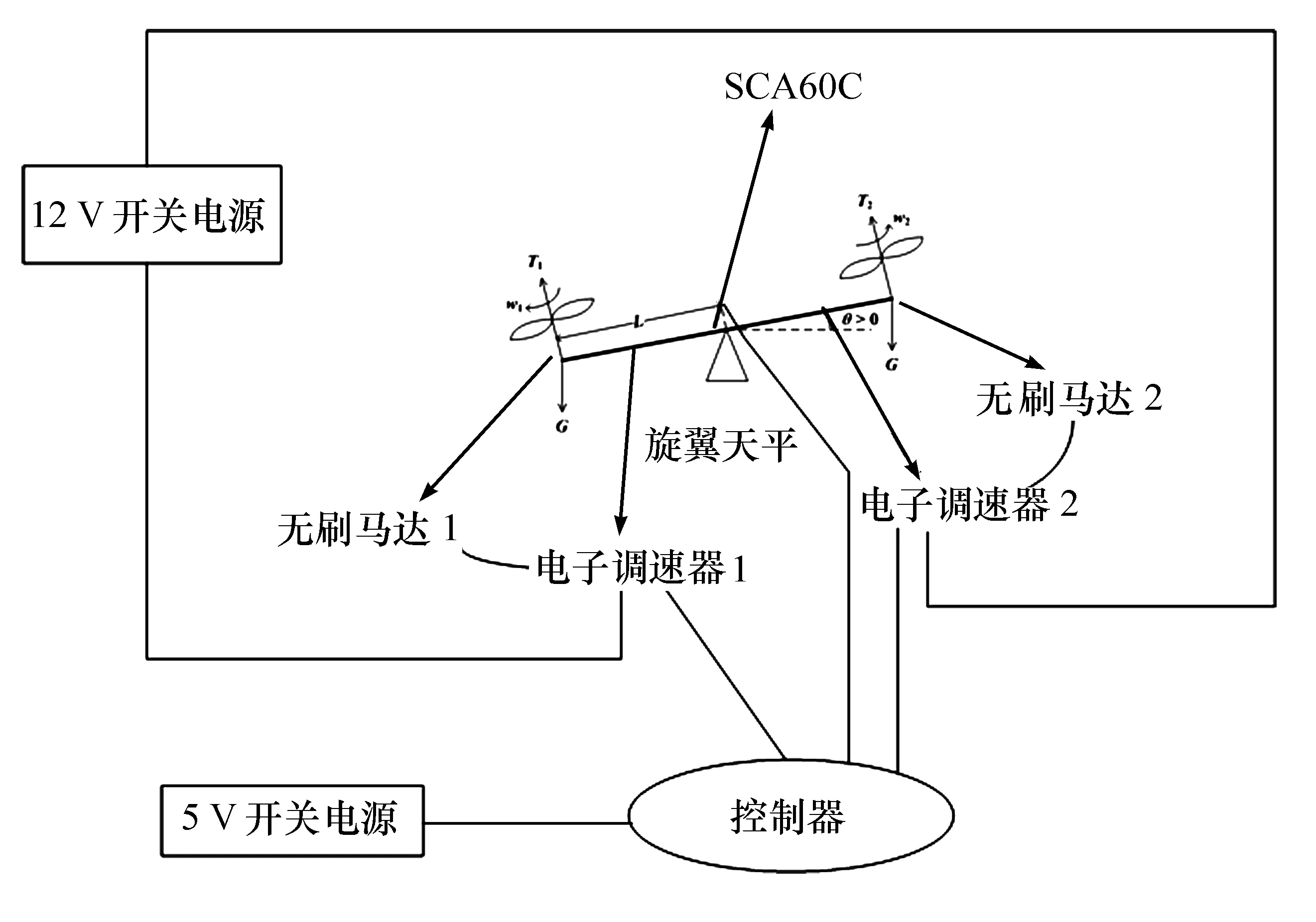
图1 多旋翼飞行器控制系统的实验平台组成框图
2 实验平台的运行原理
实验平台用于模拟多旋翼飞行器在一个旋转轴上
的姿态运动,控制目标是保持天平摆臂的水平,其运行过程如下:
(1) 打开5 V开关电源给控制器上电,如果是第一次运行系统,则按下控制器上的Function键,再打开12 V开关电源给马达和电子调速器上电,完成电子调速器的控制行程识别;
(2) 保持天平摆臂水平并按下控制器Zero按钮,完成倾角传感器的水平初始化;
(3) 若不是第一次运行系统,打开12 V开关电源给马达和电子调速器上电;
(4) 旋翼天平的双边马达开始以初始转速工作,系统进入自动平衡状态;
(5) 给天平施加外部干扰,如用风扇吹、用外力触碰天平摆臂等,观察系统的自动平衡效果。
图2为多旋翼飞行器控制系统实验平台的运行控制流程图。

图2 多旋翼飞行器控制系统实验平台的运行和控制流程图
3 实验平台的控制律设计
多旋翼飞行器控制系统实验平台采用PID控制律设计,通过对双旋翼天平系统进行数学建模,从而获得其微分方程和状态空间表达式,使用基于参量李雅普诺夫方程(Parametric Lyapunov Equation,PLE)[8]的低增益反馈设计法,能够较好地完成天平的平衡控制,并有利于调节PID参数。
3.1 系统的数学建模
图3显示了实验平台的物理模型,其中T1和T2表示双边马达带动螺旋桨产生的升力,ω1和ω2表示螺旋桨的转速,L表示马达到摆臂重心的长度,θ表示摆臂倾角,G表示重力。

图3 多旋翼飞行器控制系统实验平台的物理模型
螺旋桨产生的升力T[9]为
其中,T表示升力,ω表示转速,λ为升力系数,
λ=0.000 25×d×p×s
(1)
d为桨径(cm),p为标准大气压,s表示桨宽(cm)。使用Mega8L的Timer1定时器在OC1A管脚输出幅值和相位都是准确的PWM方波,提供给电子调速器以控制无刷马达转速。可近似认为电子调速器能实现线性调节,使用OCR1A寄存器来存放控制PWM占空比的变量。电子调速器能够识别的PWM波频率是50 Hz,若采用Timer1定时器最高20 000的计数上限,则OCR1A=1 000时对应马达停止位,OCR1A=2 000时对应马达最高转速位。可用下式计算控制马达到期望转速的OCR1A寄存器值:

(2)
其中ωmax为马达带动螺旋桨能产生的最大转速。
建立旋翼天平的运动学微分方程为
其中M为螺旋桨产生的转矩,J为天平转动惯量。将其转换为状态空间表达式:


(3)
其中转动惯量J为:
(4)
其中m为天平摆臂的质量。
3.2 系统的控制律设计
系统的控制目标是保持天平摆臂的水平,即θ=0。采用基于参量李雅普诺夫方程的低增益反馈设计方法,对模型描述的系统设计低增益状态反馈律。
设R=1,I∈R2×2为单位阵,低增益参数>0。
求解PLE:
解得正定矩阵:
则状态反馈律为:
(5)

设Kp=δγ2,Kd=2δγ,则式(5)可写为:
(6)
可见,这是一个典型的一阶系统PD控制律。继续求取单片机程序控制量OCR1A:
则
将其代入式(2)中,ω更换为ω1,得到:

经测定,ωmax为11 000 r/min。λ是升力系数,可由式(1)求得。T2为另一侧马达产生的升力,可由马达转速初值和上一控制周期类似的计算过程求得。u(t)是本侧马达当前时刻的控制量,可由式(6)求得。
3.3 系统的控制律改进及数值解法
为了获得提高旋翼天平在马达任意转速范围内的稳定性并减小稳态误差,在式(6)中增加积分环节,得到:

(7)
其中θ′是上一个控制周期的摆臂倾角,Δt是控制周期,这里取Δt=40ms。
摆臂的倾角积分在单片机程序中可由下式近似得到:
当要求更高的响应速度和更小超调量的时候,可以扩展控制律到二阶系统,考虑摆臂角加速度对系统的影响,如下式:
其中θ″是向前两个控制周期的摆臂倾角,其他变量同式(7)。
3.4 实验平台的控制系统仿真

图4 多旋翼飞行器控制系统实验平台的Simulink仿真框图

图5 系统响应曲线(γ=0.5)
当γ=4.5时,系统响应曲线如图6所示:

图6 系统响应曲线(γ=4.5)
4 实验平台的实现
4.1 实验平台的硬件
实验平台主要包括以下硬件部分:
(1) 天平摆臂:1根长0.5m的四方角铝,刚性好,在运动中无形变;
(2) 天平框架:5mm厚亚克力板雕刻而成,中央含双轴承和1根转动轴,转动轴由2片经预紧的夹板固定于摆臂中心;框架左右限位角约40°;
(3) 马达:2颗双天2212-13II型无刷马达;
(4) 电子调速器:2颗好赢30A、额定电压22.2V无刷电子调速器;
(5) 传感器:1颗SCA60C倾角传感器,使用减震双面胶贴于天平摆臂靠近重心位置;
(6) 控制器:含有Mega8L的PCB控制板,含1个1602液晶显示屏、2个按钮和若干插针;
(7) 电源:1个12V/10A输出开关电源,以及1个5V/6A输出开关电源。
4.2 实验平台控制器的设计
使用Protel完成实验平台控制器印制电路板(PCB)的电路设计(见图7)。控制器实物交由PCB工厂代工,并进行元器件的手工焊接。
控制器的结构采用以Mega8L单片机为核心的数字电路设计。控制器开启一路A/D转换端口完成SCA60C倾角传感器的角度识别,并使用TL431[10]作为基准电压源。利用Mega8L的T1定时器完成可变占空比的PWM输出,驱动电子调速器和马达进行旋翼变速。图8显示了控制器的逻辑结构。
4.3 实验平台的软件
实验平台的软件是指Mega8L单片机中灌注的单片机程序,使用惠普公司的CodeVisionAVRC语言编译环境编制。控制器软件主体结构是一个while(1)循环,在不断完成控制周期推进的同时,调用各中断处理程序完成多线程采样和解算。图9为控制器Mega8L单片机程序的时序图。
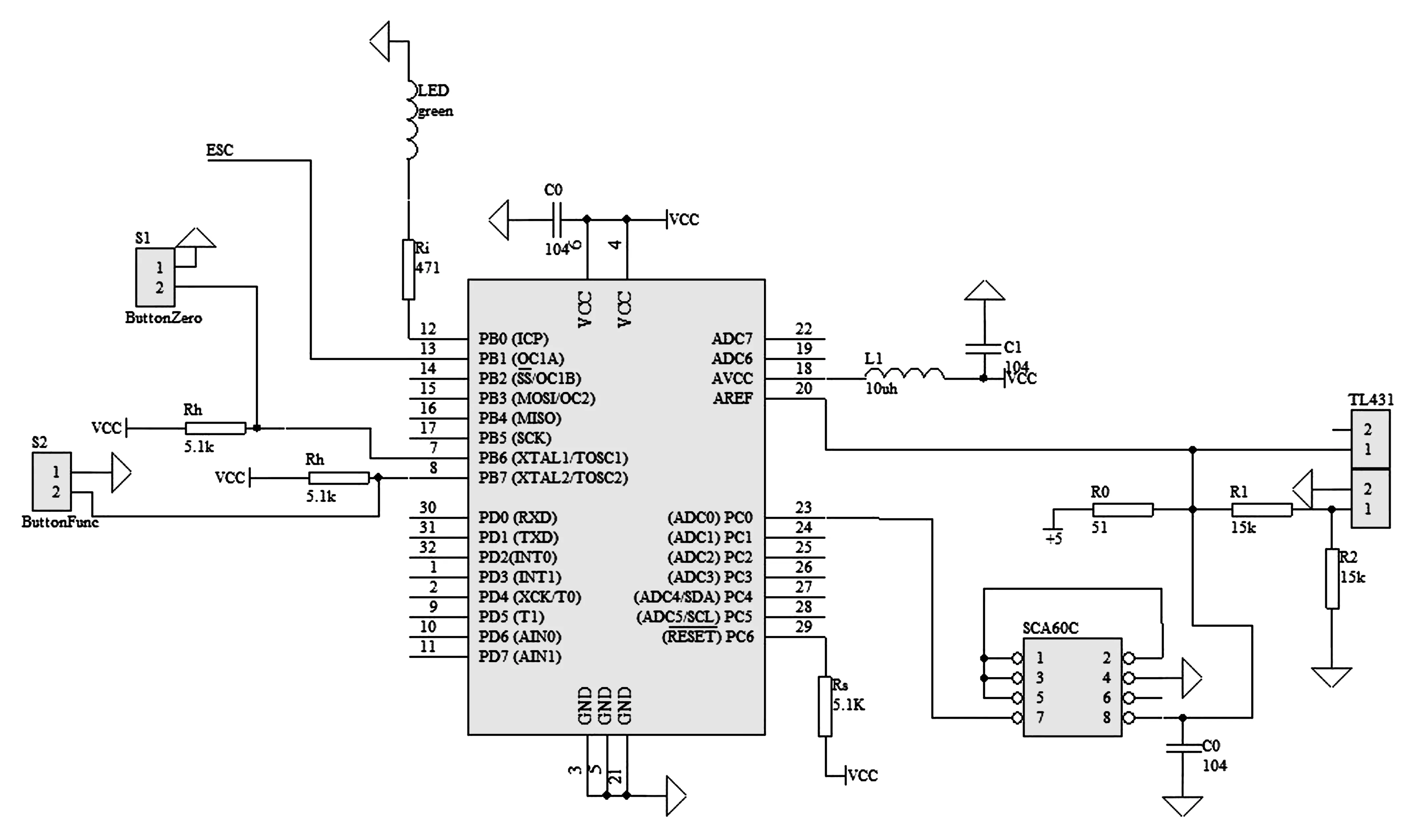
图7 实验平台控制器的Protel电路设计
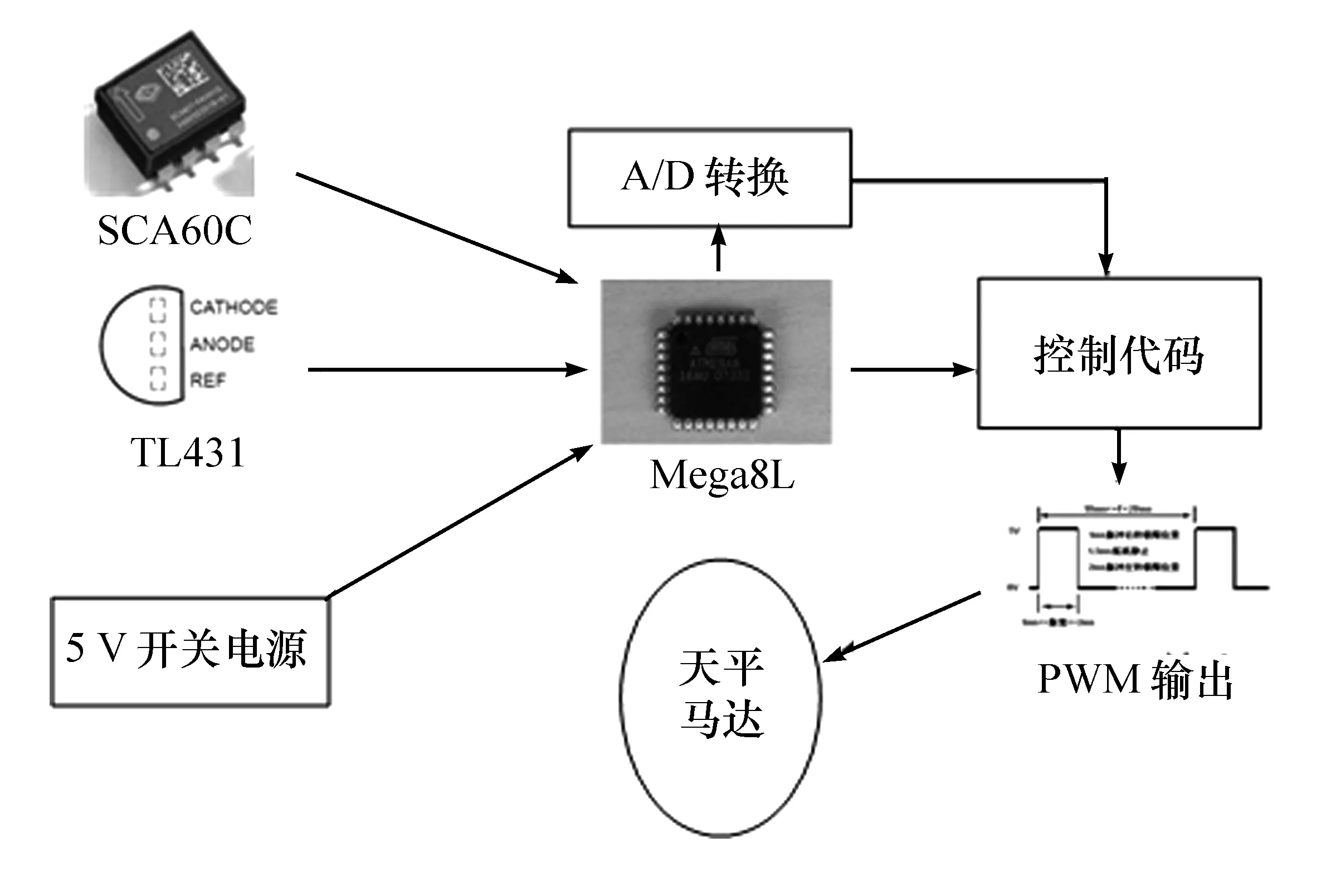
图8 实验平台控制器的逻辑结构
使用ISPro下载型编程器,将CodeVisionAVR编译环境生成的hex文件灌注到目标电路板上的Mega8L单片机中。
5 实验平台的运行效果
经过反复调节PID参数和倾角采样周期、控制周期等,最终确定Kp=8,Kd=5,Ki=0.5。倾角采样周期Ta=0.01 s,控制周期Tc=0.04 s。实验平台的无刷马达调速范围在0~11 000 r/min,在飞行器悬停的中速段5 000~7 500 r/min的控制效果最佳,小扰动状态下稳定时间小于0.7 s;在低速段2 000~5 000r/min的控制效果理想,小扰动状态下稳定时间小于1.2 s;在高速段7 500 r/min以上控制效果变差,越接近极限转速就越有可能不稳定。

图9 实验平台控制器单片机程序的时序图
在多旋翼飞行器的实际飞行中,低转速区间只用于起飞时阶段,这个过程通常较短,旋翼转速会快速达到中段转速的悬停区间,所以小于1.2 s的稳定时间是可以接受的。高转速区间通常用于快速上升或补偿大扰动带来的姿态变化,实际在多旋翼飞行器定点悬停中很少应用。中段转速是飞行中最多使用的转速,小于0.7 s的稳定时间在扰动风速小于6 m/s的条件下是可以接受的。
实验平台搭建的旋翼天平系统在地面模拟了多旋翼飞行器一个轴上的姿态变化和控制,可进一步设计一个基于万向球头和直升机倾斜盘[11]支撑的三自由度实验平台,用于在地面模拟多旋翼飞行器3个轴上的姿态变化和控制,如图10所示。

图10 多旋翼飞行器的三自由度地面实验平台
在三自由度姿态控制完成后,可基于GPS传感器、超声波雷达、气压高度计、加速度计等,实现多旋翼飞行器的另外3个自由度的位置控制,从而真正实现飞行器的自主飞行。
6 结语
基于Mega8L单片机的多旋翼飞行器控制系统实验平台能够完成倾角识别、无刷马达控制、天平自动平衡控制等操作,用CodeVisionAVR C语言编译环境完
成单片机程序的编制,对本科生更好地理解控制系统理论知识、增强动手能力、提高科研兴趣起到了良好的促进作用。
References)
[1] Pau S G, Yazan A R, Sang H S, et al. A novel actuation concept for a multi rotor UAV[J].Journal of Intelligent and Robotic Systems: Theory and Applications, 2014,74(1):173-191.
[2] 第五鹏杰,杨树兴.微小型多旋翼飞行器的非线性建模研究[J].兵工自动化,2012,31(6):14-17.
[3] Elfeky M, Elshafei M, Saif A A, et al. Modeling and Simulation of Quadrotor UAV with Tilting Rotors[J].International Journal of Control Automation & Systems,2016,14(4):1-9.
[4] 王红雨,赵健康,郁文贤,等.四旋翼飞行器建模及位置跟踪控制[J].中国惯性技术学报,2012,20(4):455-458.
[5] VTI Technologies. SCA60C Datasheet[EB/OL].http://www.vti.fi.2012:1-10.
[6] Pounds P E, Bersak D R, Dollar A M. Stability of small-scale UAV helicopters and quadrotors with added payload mass under PID control[J].Autonomous Robots, 2012,33(33):129-142.
[6] 陈乾宏,阮新波,严仰光.开关电源中磁集成技术及其应用[J].电工技术学报,2004,19(3):1-8.
[8] 董晨,晁涛,王松艳,等.多约束下考虑控制饱和的自适应末制导方法[J].宇航学报,2014,35(6):677-684.
[9] 李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报,2012,31(1):114-117.
[10] Texas Instruments. TL43xx Datasheet[EB/OL].https://www.ti.com.2016:1-30.
[11] 袁夏明,朱纪洪,陈志刚,等.一种共轴式直升机操纵机构的运动学建模与分析[J].航空学报,2013,34(5):988-1000.
Development of experimental platform of control system with multi-rotor flying vehicle
Fang Ke, Wang Yongkun, Zhou Yuchen
(Control & Simulation Center, Harbin Institute of Technology, Harbin 150080, China)
For allowing the undergraduates to understand and grasp knowledge better, visually feel the actual running effect of their own designed control law, and accomplish ground test before flying, an experimental platform based on bi-rotor level is developed. The platform solves leaning angle recognition, motor speed regulation, control law verification, etc., and applies the structure composed of Mega8L micro computing unit, SCA60C angle sensor, 2212 brushless motor, and PID control law, which guarantees an acceptable real-time figure and stability of the system.
multi-rotor flying vehicle; bi-rotor level; control system; experimental platform
10.16791/j.cnki.sjg.2017.02.033
2016-09-26
国家自然科学基金项目(61374164)
方可(1977—),男,黑龙江哈尔滨,博士,副教授,主要从事控制系统设计、系统仿真方面的教学与科研工作.
E-mail:hitsim@163.com
V275.1
A
1002-4956(2017)2-0127-05
