智能低氧呼吸训练装置自动监测与控制系统设计
2017-03-02薛加鹏蒋全胜江明明丁桂洋
薛加鹏, 蒋全胜, 江明明, 丁桂洋
(苏州科技大学机械工程学院,江苏 苏州 215009)
智能低氧呼吸训练装置自动监测与控制系统设计
薛加鹏, 蒋全胜, 江明明, 丁桂洋
(苏州科技大学机械工程学院,江苏 苏州 215009)
针对在平原地区模拟高原低氧环境训练的需求,提出了一种低氧呼吸训练装置控制系统。基于LabVIEW平台,对训练环境的气压、温度和含氧量等参数进行采集和运算,实现了对训练数据的实时记录和显示;采用位置式PID算法对系统参数的变化进行整合,进一步提高了控制精度。结果表明,该装置能够模拟高原不同海拔低氧环境,实现参数自动调节与控制,具有较好的应用价值。
智能; 控制系统; 传感器; PID算法; LabVIEW; 人机界面
0 引言
低氧呼吸训练能够挖掘运动员的机体潜能,也可以对手术病人进行术前适应训练,从而降低病人的手术风险。另外,高原作业者(如登山员、高原铁路建设工人)可以通过低氧训练,适应高原的恶劣环境[1-2]。本文设计的呼吸训练装置是一种低氧训练或医用的低氧供气系统,能够在平原模拟贫氧的高海拔山区环境。该装置利用LabVIEW平台作为上位机,实时监控调节采集的数据;采用单片机作为下位机,单片机和计算机采用串口双向通信[3-5]。
本装置是将加压的清洁空气通过膜分离单元过滤部分氧气,得到贫氧空气供训练者使用,是一种物理式的低氧发生系统。设计的控制系统根据对训练环境的气压、温度和含氧量等参数进行采集和运算,以稳定输出满足不同海拔高度要求的产品气供用户使用。
1 低氧呼吸控制系统方案设计
1.1 工作原理
首先,外部空气通过初步过滤进入空气压缩机进行加压;然后通过精细过滤,去除油、水蒸气、细小灰尘等杂质,进行压力控制,同时通过加热器适当提高气体温度,进入膜分离单元进行氮氧分离,得到贫氧富氮的空气;最后输出给呼吸面罩,供用户使用。该装置系统工作原理如图1所示。
当用户打开面罩(或直接启动系统开关)时,流量控制阀根据需要对输出的气体流量进行控制调节。
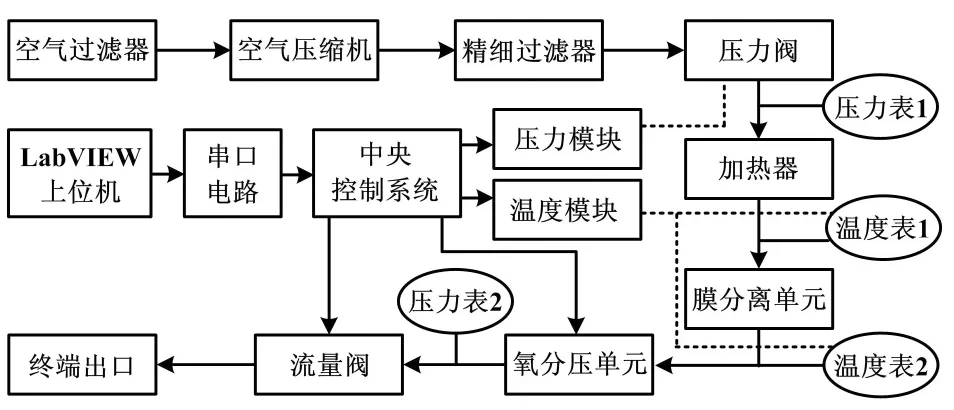
图1 装置系统工作原理图
1.2 控制方案
控制方案采用单片机作为下位机,LabVIEW平台作为上位机。单片机通过串口电路MAX232转换之后,能够和计算机进行双向通信。计算机既可以通过单片机接收采集的信息,又可以发送指令控制单片机调节温度和压力。该控制系统示意图如图2所示。
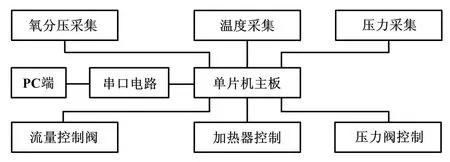
图2 控制系统示意图
系统的总控制电路包括温度控制单元、压力控制单元和串口电路三个主要部分。串口通信电路采用MAX232转换之后,实现单片机和计算机之间的数据通信。
1.3 压力控制
采用PI比例积分调节电路控制外部继电器的闭合,实现对压力阀的控制。压力控制电路中,R12连接ATMEGA16单片机的PC2端口,压力传感器分别连接ATM单片机的PA5和PA7端口。当R12连接的单片机引脚通电时,控制电路接通。根据PI调节电路进行适当的调节,控制外部压力阀继电器的闭合,最终实现对系统气体管道中压力的精确调节和控制。压力控制回路如图3所示。
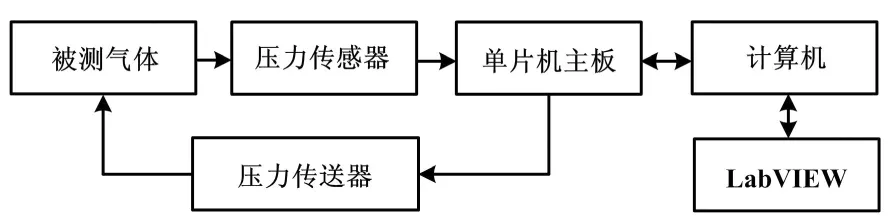
图3 压力控制回路
图3中,采用压力控制回路能够及时调整参数,传感器实时检测的压力参数,通过单片机上传到LabVIEW平台。经过LabVIEW参数的运算,发出对压力控制的调整指令。通过单片机把指令传送到执行元件压力传送器,即可实现对压力的回路控制。
1.4 温度控制
系统采用两个DS18B20温度传感器,分别连接在单片机的PB5和PB7引脚上。传感器的VCC引脚接+5 V,GND接地。DQ通信接口引脚, 因此该传感器只需要一根连线就可以和单片机通信。单片机通过通信接口,连接传感器读取数据。该传感器的精度满足系统对温度采集的准确性需求。温度控制回路如图4所示。
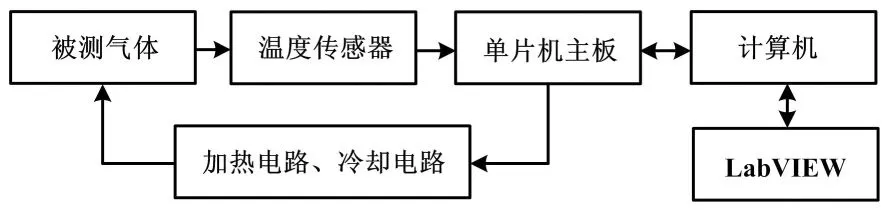
图4 温度控制回路
温度加热电路采用脉冲宽度调制(pulse width modulation,PWM)技术。当U5接通时,加热电路接通。连接的单片机引脚通电,U5中的发光二极管导通,在一旁的光敏电阻接收到光线,则光敏电阻导通。此时加热电路接通,并且加热丝开始工作。利用U5可以实现光电隔离保护电路的作用。加热电路是高压电路,而控制电路是低压电路。采用U5实现电路的隔离,可起到保护作用。
2 LabVIEW平台设计
2.1 人机界面设计
系统主界面主要分为四个部分:显示区、设定区、记录区和警报区。
利用波形图表显示控件时刻监控含氧量的变化趋势,同时记录数据。点击历史记录按钮,可以将检测的实时数据写入表格,以便后期的科学研究和数据查询。点击查询数据按钮,可以自动调出已经记录的数据,并且能够生成波形图表,以便操作者直观地观察数据的变化趋势。
PID控制单元是嵌入在主面板的子VI,能够独立运行。本软件的设计以压力PID控制为例,采用精确的PID控制算法,以独立的VI程序对采集的温度信息进行数据处理,并利用实际值和预设理论值的偏差对压力进行精确、有效的调节。
2.2 模拟海拔高度设定
基于LabVIEW平台,开发了模拟海拔高度的模块。用户可以方便地设定所需海拔高度,系统会自动计算出相应的气压、含氧量和温度等参数。
系统需要确定模拟海拔高度的气压、氧气含量和温度等环境参数。平原地区的平均大气压一般为101 kPa。
高海拔地区的气压计算公式如下:
(1)
式中:P0为标准的大气压值,P0=101 kPa;P为要求的大气压强;H为模拟的海拔高度。
氧气含量也可以通过以下公式进行计算:
(P0-6.2)×CO2=(P-6.2)×20.9%
(2)
式中:P0为标准的大气压值,P0=101 kPa;P为要求的大气压强;CO2为要求的氧气含量值。
3 压力PID控制
基于比例-积分-微分(PID)算法的控制器是目前应用最为广泛的工业用控制器之一,其在航天、冶金、机械等行业中的应用十分广泛[6-8]。
PID控制器的原理是计算实际测量值与设定的需求值之间的偏差e,进行相应的PID运算后将结果转化成输出控制信号,进一步施加到执行机构上,以实现对整个系统的实时闭环控制。其优势是控制精度较高,对外界数据的变化量反应迅速、控制准确有效。
PID的函数表达式为:
(3)
转换成传递函数为:
(4)
式中:Kp为比例环节的系数;Ti为积分环节的时间常数;Td为微分环节的时间常数。
设u(k)为第k次采样时刻控制器的输出值,采用位置式PID算法的公式为:
式中:k为采样的次数;e为偏差值;u为输出;Kp、Ki、Kd分别为需要在界面设定的比例系数、积分系数和微分系数。
本控制系统主要通过LabVIEW软件平台,采用LabVIEW内部函数对参数进行数据算法的运算和调节。在软件编程上,通过采集每个时间段上的数据并和设定值进行比较,计算出偏差值。通过LabVIEW循环结构中的移位寄存器,记录每次比较的偏差值,代入下一循环进行参数的运算。
系统压力PID控制效果如图5所示。

图5 压力PID控制效果示意图
程序设计中,将位置式PID计算公式编程写入程序的数据流中,实现及时调整和修正运行参数的目的。同时,通过循环结构中的移位寄存器,将累计的偏差e和累计积分保存到下一个循环中,实现了公式中e(k)-e(k-1)和累计积分的运算。
4 结束语
本文从低氧呼吸训练领域的市场需求出发。设计了一种用于低氧呼吸训练或低氧保健医疗的智能化控制系统。系统基于LabVIEW平台开发环境,运用G语言的图形化编程,对管道空气的气压、温度和含氧量等参数进行采集和运算,实现了系统参数的实时自动调节;通过单片机控制技术,以及PID算法的应用,提高了系统参数的控制精度。该低氧呼吸装置控制系统能够模拟不同海拔高度的高原空气环境,一方面,可帮助高原作业者通过训练来适应严重的高原反应;另一方面,可以给平原地区运动员提供贫氧的训练环境,以激励和提升人体机体潜能,取得了较好的训练效果。
[1] 王偲宇,俞梦孙,王彬华,等.基于模糊自适应算法的低氧舱控制系统设计[J].北京生物医学工程,2014,33(4):397-402.
[2] KOHN K W,RISS J, APRELIKOVA O.Properties of switch-like bioregulatory networks studied by simulation of the hypoxia response control system[J].Molecular Biology of the Cell,2004,15(7):3042-3052.
[3] 熊秀.基于虚拟仪器的控制系统[D].西安:西北工业大学,2005.
[4] 刘君华.虚拟仪器图形化编程语言LABVIEW教程[M].西安:西安电子科技大学出版社,2001.
[5] 王伟,刘士国,涂桥安,等.基于LabVIEW的机械密封试验装置测控系统研究[J].制造技术与机床,2015(3):79-82.
[6] 姜恒,陈先锋,成群林,等.便携式氮气冲洗装置控制系统设计[J].自动化仪表,2014(9):91-94.
[7] 卢佩,刘效勇.基于LABVIEW的温室大棚温、湿度解耦模糊控制监控系统设计与实现[J].山东农业大学学报(自然科学版),2012,43(1):124-128.
[8] 张志利,侯传勋,姜毅.基于虚拟仪器的数据采集板卡校准技术研究[J].自动化仪表,2011,32(12):20-23.
Design of Automatic Monitoring and Control System for Intelligent Hypoxic Breathing Training Device
XUE Jiapeng,JIANG Quansheng,JIANG Mingming,DING Guiyang
(School of Mechanical Engineering,Suzhou University of Science and Technology,Suzhou 215009,China)
Aiming at the demands for simulating the high altitude hypoxia environment training in the plain area,the design scheme of control system for the hypoxic breathing training device is put forward.Based on LabVIEW platform,the atmospheric pressure,temperature and oxygen content and other parameters of the training environment are collected and operated,to achieve real-time recording and displaying of the training data; the variation of system parameters is integrated by using positional PID algorithm,and the control precision is improved in further.The results show that the device can simulate hypoxia environment of plateau at different altitudes,and realize automatic regulation and control of system parameters,it has good applicable values.
Intelligence; Control system; PID algorithm; LabVIEW; Human-computer interface
苏州科技学院科研基金资助项目(XKZ201408)
薛加鹏(1995—),男,在读本科生,主要从事机电设备自动控制方向的研究。E-mail:297060663@qq.com。 蒋全胜(通信作者),男,博士,副教授,主要从事机电设备自动控制与信号处理、故障诊断等方向的研究。E-mail:qschiang@163.com。
TH7;TP272
A
10.16086/j.cnki.issn 1000-0380.201702007
修改稿收到日期:2016-08-15
