一种基于显著性区域检测的特征匹配算法
2017-03-01赵汝进任国强洪裕珍
康 璐,赵汝进,任国强,洪裕珍
(1.中国科学院光电技术研究所 四川 成都610209;2.中国科学院大学 北京100149)
一种基于显著性区域检测的特征匹配算法
康 璐1,2,赵汝进1,任国强1,洪裕珍1,2
(1.中国科学院光电技术研究所 四川 成都610209;2.中国科学院大学 北京100149)
针对传统特征匹配算法在实际的应用中存在搜索范围广、无关特征点多等问题,提出一种基于显著性区域检测特征匹配方法。首先利用显著性区域检测算法滤除图像中的背景,获取图像显著性区域;在此基础上利用SURF(Speed-up robust features,SURF)算法在显著区域内进行特征匹配;最后利用RANSAC(Random Sample Consensus,RANSAC)算法剔除误匹配,以匹配准确性。仿真验证试验中,图像特征匹配准确度平均提高7%左右,试验结果表明:基于显著性区域检测的特征匹配算法,能有效地降低图像背景对图像匹配的干扰,提高匹配的精度。
图像匹配;显著性区域检测;加速鲁棒特征;RANSAC
上世纪70年代,Moravec提出基于图像灰度自相关函数的特征点检测算子。针对Moravec算子对图像旋转等因素非常敏感的问题,Harris等人在Moravec基础上提出了对灰度和旋转具有较好适应性的Harris算子。然而Harris算子对噪声较为敏感,1997年,Smith等人提出具有较强的抗噪性能的基于灰度的特征点获取方法。2004年,Lowe提出了对尺度变换、旋转以及仿射变换具有不变性的特征描述算法---SIFT(Scale-invariant Feature Transform)。后来,在Lowe的工作的基础之上,研究者们围绕SIFT做了大量的应用优化改进研究。如Ke等人提出的PCA-SIFT算法,对特征描述子进行降维处理,以解决 SIFT算法计算量大的问题。Bay提出的SURF特征匹配算法利用积分图像和快速Hessian检测算子,降低算法复杂度[1-2]。近年来不少学者在检测算子、图像匹配等领域做了很多的工作[3-7]。在应用方面,尹春霞等人将SIFT算法与显著图相结合,加快了匹配速度,并能获得更高的稳定性[8]。李文凤等人结合SIFT算法和显著性区域检测算法提高了SIFT算法的实时性[9]。本文提出一种基于显著性区域检测的特征匹配算法,该方法结合SURF特征匹配算法和频率调谐的显著性区域检测方法。实验结果表明,改进后的算法能更好的避免图像背景带来的匹配干扰,能有效的提高匹配精度。
1 显著性区域检测
一幅图像在频率域可以分为低频部分和高频部分。其中,低频部分主要反映了图像的轮廓,基本的组成区域。而高频部分主要反映了图像的细节信息,如纹理等。在显著区域检测中表示所需的最低频率,表示所需的最高频率。论文[10]中介绍了一种组合DoG滤波器来获取和的信息。其中单个DoG是一个简单的带通滤波器:

为了获得合适的带宽,Achanta将σ1和σ2的比率设置为ρ=1/1.6。组合DoG滤波器Fn的表达式如下:
当n>0时,Fn可以简化为两个高斯函数的差,此时组合滤波器的宽度由K=ρn决定。
在实际的运算过程中,为了使K尽可能的大,可以设置n→∞。此时G(x,y,ρnσ)就是对整个图像的平均,像素pix的显著性计算公式为:

其中,Ien为图像的平均特征,Iwk(pix)为像素pix在高斯平滑后的图像的CIELAB颜色特征。‖·‖为范数,显著图即为Ien和Iwh(pix)在CIELAB颜色空间的欧式距离。
2 SURF算法
2.1 特征点检测
为了加速计算过程,Bay使用盒滤波器近似高斯滤波器,然后通过盒滤波器和积分图像获得Hessian矩阵的行列式,最后利用非极大值抑制的方法获得特征点。
对于一幅图像中的一点X=(x,y)尺度为σ的Hessian矩阵H(X,σ)定义为:


对于Hessian行列式的近似,Bay用近似后的不同的盒滤波器分别和图像进行卷积的结果 Dxx,Dxy和Dyy来近似Lxx,Lxy和Lyy,这样H(X,σ)的行列式的近似表达式可以表示为:

图1为盒滤波器近似高斯滤波器的示意图,该图表明盒滤波器的权值在一块连续区域内是相同的,即在计算滤波器与图像的卷积时就等价为计算原图像在该点处的积分图像,而根据积分图像的快速算法,此过程只需进行简单的查表操作,然后进行加减运算即可。如此在保证计算精度的情况下又能的简化计算过程,进而降低计算量。
图像I在X=(x,y)T处的积分图像IΣ(X)[11]定义为:

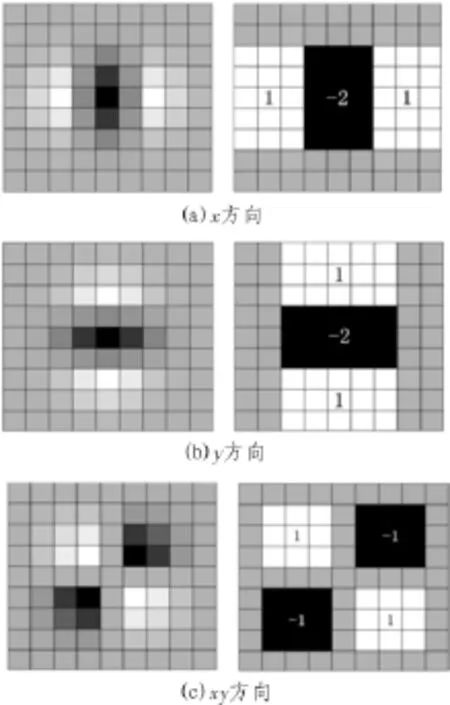
图1 高斯滤波器的近似过程
2.2 SURF特征描述
SURF特征匹配算法通过计算积分图像的一阶Harr小波响应,得到灰度分布信息以创建特征点的描述向量。下面是获得SURF描述子的两个主要步骤:
1)确定主方向:Harr小波系数是以每一个以特征点为圆心、半径为6 s(s为特征点对应的尺度)的邻域中的点计算得到的。然后将60°范围内的Harr小波响应值累加形成新的矢量,在整个区域内,选择最长矢量的方向作为主方向。
2)生成特征矢量:将坐标轴旋转到主方向以确保最后的描述向量具有旋转不变性。同时按主方向选取边长为20 s的方形区域,并均匀的划分为4×4的共16个子区域,在每个子区域内计算5 s×5 s范围内的Harr小波响应,其中和分别表示水平和竖直方向上的Harr小波响应。每一个子区域可以使用向量来描述,其中

这样,每一个特征点就形成了一个64维的描述向量。
3 RANSAC算法原理
在一组样本数据集中可以将样本数据分为两类,一类是正确数据(inliers,可以被模型描述的数据),另一类是异常数据(outliers,无法适应数学模型的数据), 即样本数据中存在有噪声数据。 而RANSAC算法[12-13]是基于一组包含异常数据的样本数据集,通过一定的迭代方式估计数学模型的参数,得到有效样本数据的算法。RANSAC算法由Fischler M A在1981年首次提出,该算法先选择一个小的数据点子集,然后对其进行拟合,记录可以匹配到拟合物体上的点。继续这个过程直到以较大的概率找到想要找的结构[14]。
图像匹配的目的是在第二幅图像中找到与第一幅图像对应的特征点。文中通过利用RANSAC算法估计一个能反映两幅待匹配图像的特征点之间对应关系的模型F。模型F满足表达式:

亦可记为X1=F·X。其中X1和X表示一组匹配点对,F称为变换矩阵。
RANSAC估计模型F的具体步骤:
1)在n个候选点对中任意地取4个点对建立方程组,可解出变换矩阵F中的8个未知参数;
2)计算其余n-4个特征点经过变换矩阵F处理后,与它们对应的匹配点之间的距离distance。其中;
3)设定一个阈值,若distance小于此阈值,则标记该点为内点,否则标记为外点;
4)统计在此次估计中内点和外点的数量,并记内点集合为Ai(i=1,2,3,4,...,k;其中k为重复次数);
5)再另外选择4对待匹配点对,执行步骤(1)~(4),重复k次后,选择内点最多的集合Ai作为最佳的内点集合,同时对应的变换矩阵Fi是最佳的估计模型。
据以上步骤得到两幅待匹配图像的坐标对应关系F,同时也能有效的剔除误匹配或者大误差匹配点对。
4 算法实验
4.1 算法流程
为了降低图像背景对图像整体匹配质量的影响,文中将上述显著性区域检测方法应用在SURF特征匹配算法中,最后使用RANSAC算法剔除误匹配点,最后的实验结果表明,本方法有效的提高了图像匹配质量。流程如下:

图2 算法流程
文中的算法在利用SURF特征匹配算法进行特征点检测之前对图像进行显著性处理,滤除大部分的背景图像。在此基础之上,充分吸收了SURF算法的优势完成对特征点的检测、描述和匹配的 ,最后通过RANSAC算法剔除误匹配。
4.2 结果分析
本实验是在ubuntu 14.04.01 SMP操作系统下完成的。使用软件为g++、opencv2.4.10。
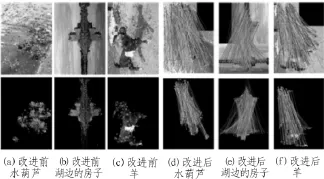
图3 改进前后特征点的分布和匹配结果对比
如图3左图所示,改进前在整幅图像中检测到大量的特征点,其中背景中的特征点占整幅图像特征点的一半以上,这会严重影响图像匹配质量。改进之后,特征点聚集在目标物体之上,能够最大限度的降低背景区域对目标区域的匹配干扰。
图3右图为上面三幅图像在进行显著性区域检测之前的匹配结果,右图下三幅图像是进行显著性区域检测后的匹配结果。由此表明,改进前,图像背景中的特征点当中产生的匹配对匹配质量造成了相当大的影响,并且其中还存在大量的错误匹配,比如背景中的特征点与目标区域的特征点匹配,这样会对整个匹配结果造成很大影响。
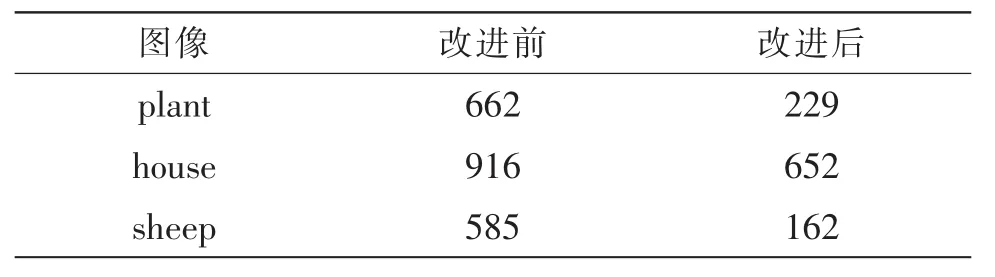
表1 改进前后检测到的特征点数量
表1表明,改进后比改进前检测到的特征点少了许多。虽然如此,但改进后检测到的特征点几乎都落在目标区域,即改进后检测到的特征点相比于改进前检测到的特征点有更高的质量,更能反映目标的真实信息。
表2是对原图像和经过显著性处理后的图像进行匹配后,由RANSAC算法处理前后的匹配点对数对比,进一步说明经过显著性处理后匹配的精度比改进前平均提高了大约7%。其中,两个主要因素导致改进后house图像组的剔除的误匹配点对数较多,一是图像中草地跟灌木丛相似度较高,另外一个因素是房子在湖面中的倒影和房子本身的相似度很高。
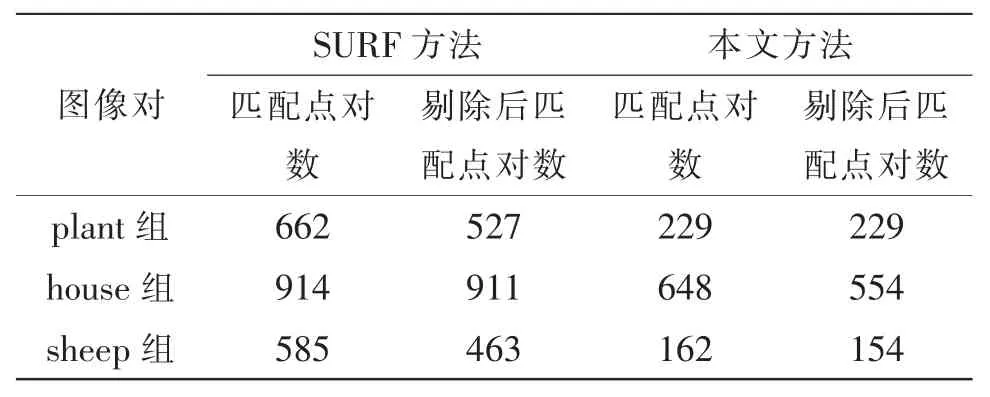
表2 RANSAC算法剔除误匹配对比
5 结 论
关于匹配算法的改进研究,不少研究者根据不同的应用环境提出过不同的改进方案,令其适用于不同的应用环境,这也将是计算机视觉相关算法的一个发展方向。文中就是针对传统算法在特征点检测过程中存在的应用问题,引入显著性区域检测算法,优化传统算法的特征点检测步骤。最后通过实验证明这种改进的方法是可行的。
[1]H Bay,T Tuytelaars,L Gool.Surf:Speeded up robust features.1:404-417[C]//Proc.of ECCV.2013.
[2]Panchal P M,Panchal S R,Shah S K.A Comparison of sift and surf[J].International Journal of Innovative Research in Computer&Communication Engineering,2013,1(2):323-327.
[3]王启春,郭广礼,查剑锋,等.基于图像灰度点特征提取算子的比较研究及改进[J].大地测量与地球动力学,2012,32(2):148-154.
[4]曾琦,刘浏,李建勋.Image registration method based on improved Harris corner detector[J].Chinese Optics Letters,2010,8(6):573-576.
[5]Zhang J,Chen Q,Sun Q,et al.A highly repeatable feature detector:improved Harris-Laplace[J]. Multimedia Tools&Applications,2011,52(1): 175-186.
[6]Zhu G,Wang Q,Yuan Y,et al.SIFT on manifold:An intrinsic description[J].Neurocomputing,2013,113(7):227-233.
[7]Y U Li-Li,Dai Q.Improved SIFT feature matching algorithm[J].Computer Engineering,2011,37(2): 210-212.
[8]尹春霞,徐德,李成荣,等.基于显著图的SIFT特征检测与匹配[J].计算机工程,2012,38(16):189-91.
[9]李文凤,胡玉兰.基于图像显著区域检测的SIFT特征匹配方法研究[J].微型机与应用,2015(6):59-61.
[10]Zhang Y,Lan Y,Ren H,et al.Robust Frequency-tuned Salient Region Detection[J].International Journal of Digital Content Technology&Its Applications,2012,6(20):361-369.
[11]新浪博客.积分图像与积分直方图[EB/OL].(2012-12-26)[2016-05-04].http://blog.sina.com.cn/s/blog_4cb0b54301017wwo.html.
[12]Derpanis K G.Overview of the RANSAC Algorithm[J].York University,2010,78(1):138-156.
[13](美)福赛斯(Forsyth,D.A.),(美)泊斯(Ponce,等.计算机视觉[M].北京:电子工业出版社,2012.
[14]王新龙.基于显著性的图像分割技术研究[D].西安:西安电子科技大学,2014.
The improvement on speeded up robust features for images matching based on salient region detection
KANG Lu1,2,ZHAO Ru-jin1,REN Guo-qiang1,HONG Yu-zhen1,2
(1.Institute of Optics and Electronics of Chinese Academy of Sciences,Chengdu 610209,China;2.University of Chinese Academy of Sciences,Beijing 100149,China)
In practice,many matching algorithmshave some problems that the searching range is very big and have many irrelevant feature points.This paper proposes a new algorithm which based on salient region detection to focus on those problems.At first,the new algorithm delete the background of image using the algorithm of salient region detection,and got the region of saliency.Then the paper computed the SURF features and matched it,usedRANSAC algorithms to remove the false pairs to improve the accuracy,finally.In the simulation experiments,the accuracy of matching had improve about 7%.From the experimental results,the new algorithm can reduce the interference of background for matching,and are more stable and more accurate for matching.
images matching;salient region detection;SURF;RANSAC
TN911.73
:A
:1674-6236(2017)02-0136-04
2016-04-25稿件编号:201604245
国家自然科学基金(61501429);中科院青年创新促进会(2016335)
康 璐(1991—),男,四川安岳人,硕士研究生。研究方向:数字图像处理。
