基于模糊PID的助行机器人调速系统的研究
2017-02-27侯伟龙
侯伟龙
(南京理工大学,南京 210094)
基于模糊PID的助行机器人调速系统的研究
侯伟龙
(南京理工大学,南京 210094)
助行机器人对系统的动态特性要求较高,而且在其爬楼的过程中有诸多不确定的因素,基于传统控制策略的单闭环负反馈控制系统调速效果难以令人满意;在这种情况下建立了系统的数学模型,设计了基于模糊PID的双闭环调速控制系统,并和传统的PID控制进行了对比;为了保证助行机器人爬楼过程的平稳性和乘坐者的舒适性,参考电梯运行的速度曲线,设计了正弦速度给定曲线;仿真结果表明:在助行机器人调速系统中,模糊PID控制比传统PID控制启动和制动过程更平稳,舒适性更高,误差更小,精度更高。
助行机器人;双闭环;正弦速度曲线;模糊PID
0 引言
目前,我国依然有将近一半的居民住在没有电梯的房子里[1],这给老年人和残疾人的出行带来了极大的不便。因此,具有助行功能[2]机器人的研究具有重大的意义。助行机器人在国外已有几十年的研究历史,目前为止已经推出了多款可以商用的助行产品[3]。但价格十分昂贵,超出了国内大多家庭的承受范围。国内在这方面的研究起步较晚,经过多年的研究,取得了很大的进步,但与国外相比仍然存在着不小的差距。
本文所研究的助行机器人[4],驱动部件的核心为无刷直流电机,能够满足一般的上下楼功能,而且成本较低,性价比较高。无刷直流常见的调速控制方法有PID控制、滑膜控制、模糊控制、最优控制等[5]。本文研究的双闭环调速系统中,电流环采用PI控制,速度环采用模糊PID控制,集成了模糊推理处理未知信息的能力和人工智能在线学习的优点, 通过改变PWM信号占空比来改变无刷直流电机的电枢电压进行调速[6]。
1 助行机器人驱动部件的数学模型
助行机器人的驱动部件主要由无刷直流电机、传动减速装置和连接在传动减速装置上用于爬楼的两个连杆小轮组成,核心为无刷直流电机。为了简化研究模型,假设电机的三相绕组完全对称,且不计涡流和磁滞损耗。
无刷直流电机三相定子绕组的电压平衡方程为:
(1)
式中,ui(i=a,b,c)为定子绕组相电压;r为每相绕组的电阻;ij(j=a,b,c)为定子绕组相电流;L为每相绕组的自感;M为每两相绕组间的互感;P为微分算子;ek(k=a,b,c)为每相的反电动势。
忽略换相时转矩脉动、互感等因素的影响,将其作为整体考虑可得系统的电压方程为[9]:
(2)
每个时刻电机都只有两相导通,因此L′=2L,r′=2r,u是定子两端电压,i是相电流,r′是回路电阻,L′是回路电感,ω是电机转速,ke是反电势系数。
负载折算以后电机转矩平衡方程为[7]:
(3)
(4)
式中,Te为电机的电磁转矩,Tl为系统的负载转矩,J为系统的转动惯量,Kt为转矩系数,Kr为阻尼系数,ω为机械角速度。
由式(2)、(3)、(4)可得:
(5)
由(5)式可知:通过控制电机的输入电压u即可调节电机输出端的转速ω。正常情况下,电机的转速每分钟可达数千转,而助行机器人通常每分钟爬10个台阶,因此需要传动减速装置,本文将传动减速装置设为1:150,因此助行小轮的实际转速ω0=ω/150左右。
2 双闭环调速系统模型的建立
2.1 双闭环控制原理
无刷直流电机转速单闭环负反馈控制可以保证系统在稳定条件下转速没有静差,但不能根据需求来控制电机动态过程的电流或转矩,主要用在对动态特性要求较低的场合。本文所研究的助行机器人对系统动态特性要求比较高,采用单闭环控制无法满足要求。因此需要在转速负反馈的基础上引入电流负反馈来控制系统动态过程的电流和转矩以改善系统的动态特性[8],其中外环为转速环,内环为电流环[3]。双闭环调速系统结构框图如图1所示。
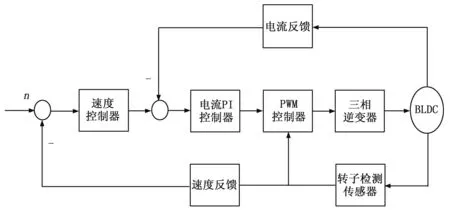
图1 双闭环控制系统结构图
速度环和电流环构成了串级控制系统,通过PWM控制器,产生方波脉冲控制信号,然后经过逆变器驱动电路,实现对电机转速的控制。双闭环控制系统在突加给定信号时表现为恒电流调节系统,充分利用了电机的过载能力,动态响应的速度较快,在稳定和接近稳定时表现为无静差调速系统,充分利用了转速、电流两个控制器的作用,获得良好的静态和动态品质。
2.2 控制策略的选择
本文所设计的双闭环控制系统中,速度环的作用是增强系统对负载变化能力的抗干扰能力,抑制转速波动,是系统主要的控制环节,因此本文主要针对速度环进行了深入研究,分别采用传统PID和模糊PID两种控制方式进行对比。电流环采用增量式PI控制器,为了防止定子绕组的电流过大,设置了限幅环节。经过反复的调节,最终确定电流环PI控制器的参数P为8,I为5。助行机器人所使用无刷直流电机的额定电流为13A,因此电流环的限幅设置为[-18,18]。
3 模糊PID控制器的设计
3.1 模糊PID控制方案设计
助行机器人在爬楼的过程中,常常受到很多外界因素的影响,比如乘坐人姿态与体重的不同、辅助者对机器人倾斜角度的不同都会对系统造成干扰,使系统的参数发生改变。PID控制器无法根据被控对象参数的改变而做出相应的调整,控制效果往往不佳。因此在本文所设计的双闭环调速系统中,速度环采用模糊PID控制器,结构图如图2所示。
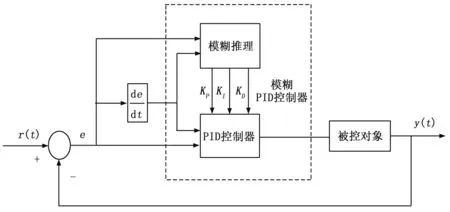
图2 模糊PID控制系统框图
模糊控制的输入为偏差e与其变化率ec。在助行机器人爬楼的过程中,系统不断地检测e与ec,量化到对应的论域,然后经模糊推理,得到PID控制器三个参数的KP,KI,KD,这样就可以根据e与ec的不同,得到不同的控制器参数,即能够根据系统所处环境和参数的不同实现PID控制器的参数的在线自整定。
3.2 模糊控制器的设计
本文所设计的模糊控制器是一个二维结构的控制器。FIS推理控制器的类型为Mamdani,解模糊方法为重心法。
(1) 输入输出变量的模糊语言描述、论域及隶属度函数。
输入、输出变量语言值的模糊子集设为{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,ZO,PS,PM,PB}。输入、输出变量的论域均为[-6,6],隶属函数都选用高斯型。
(2)模糊规则的确立。
根据e与ec对输出KP,KI,KD的影响,可得参数自整定的原则[5-6]:
a)当e较大时,应取较大的KP与较小的KI,同时为了防止系统积分饱和,出现较大的超调,应把积分作用去掉,即KI=0。
b)当e与ec时中等大小时,应取较小的KI,大小适中的KP和KD,使系统的响应速度不会太慢。
c)当e较小时,应取较大的KP和KI,为了增强系统的抗干扰能力,避免在给定值附近震荡,保证系统的稳态性能,应取中等大小的KD。
基于以上原则,共设计了49条模糊控制规则。KP,KI,KD所对应的模糊控制规则分别如表1、表2、表3所示。
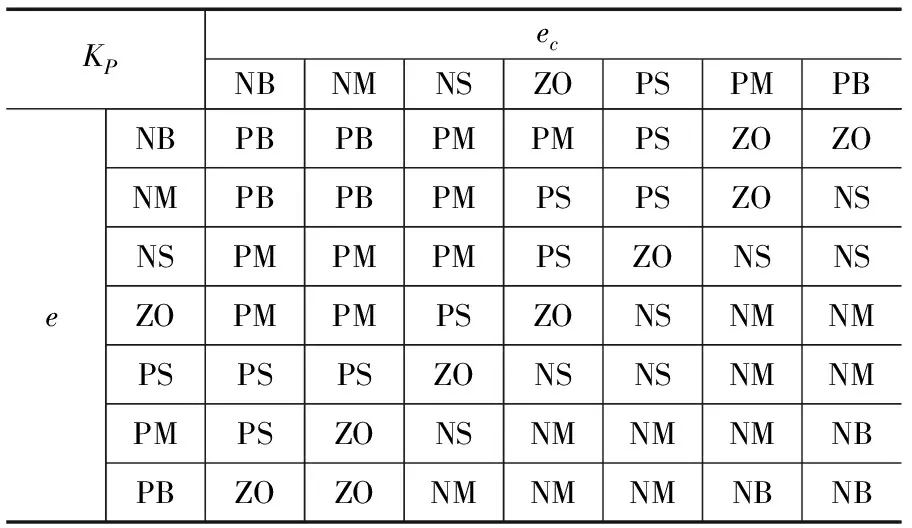
表1 KP模糊控制规则
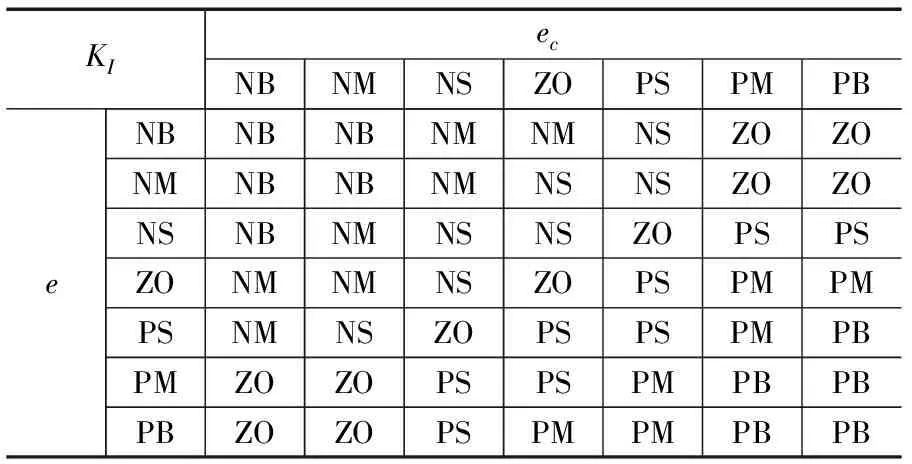
表2 KI模糊控制规则
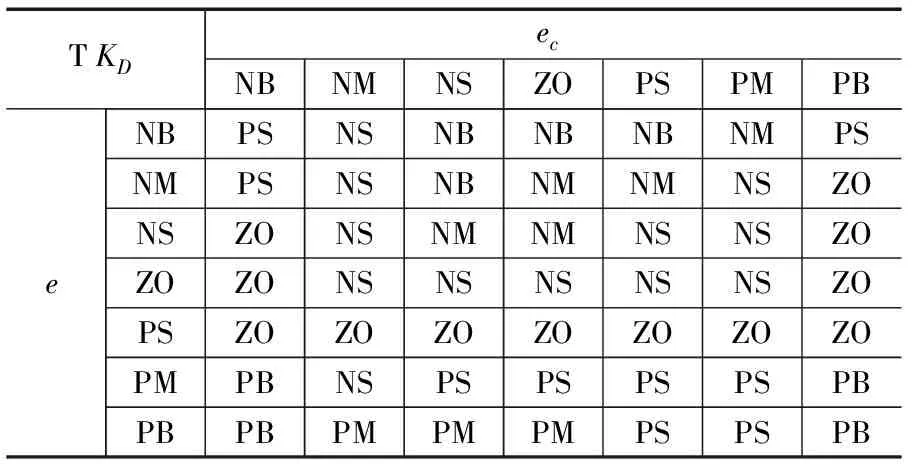
表3 KD模糊控制规则
4 助行机器人速度曲线的设计
助行机器人速度曲线给定,直接影响了乘坐者的舒适性及机器人的运行平稳性,故选择合适的速度运行曲线是保证系统良好性能的重要环节[10]。为了保证助行机器人爬楼过程的平稳性和乘坐人的舒适性,本文在设计助行机器人速度曲线的时候,参考了电梯的速度运行曲线[10],再结合助行机器人的实际情况,最终选定机器人的速度响应曲线为正弦速度曲线,如图3所示。机器人的角加速度变化曲线如图4所示。
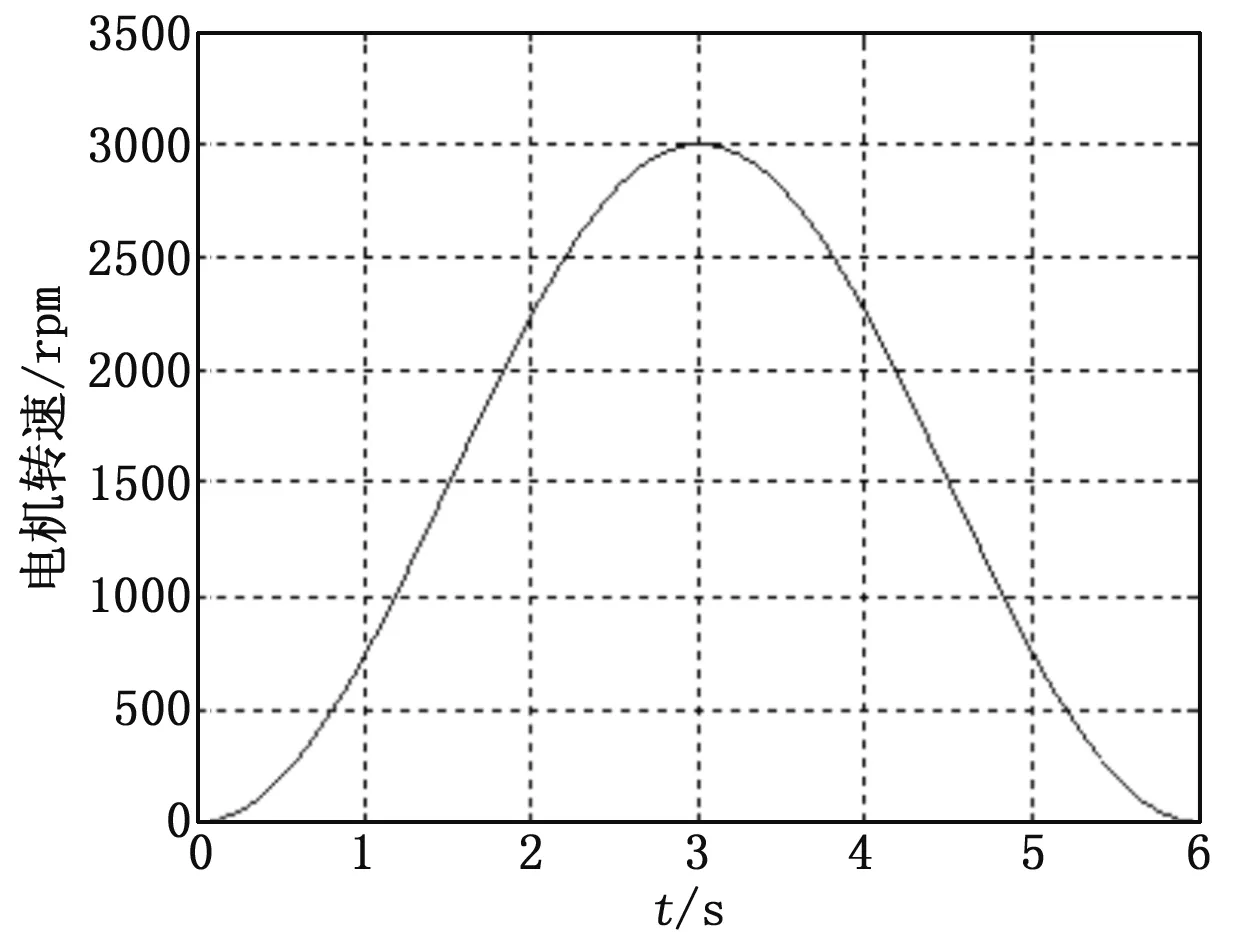
图3 电机速度给定信号曲线
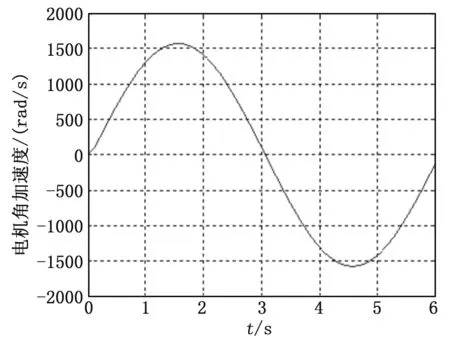
图4 电机角加速度曲线
从图4可以看出,电机的角加速度曲线是连续的,没有突变,整个过程中速度都没有发生突变,乘坐者也就不会有颠簸感。因此该速度给定信号,可以保证助行机器人爬楼过程的平稳性,以及乘坐者的舒适性。
5 仿真结果与实验分析
为了方便研究本次实验以电机的转速为观测对象,在模糊PID和PID两种控制策略下,分别对助行机器人是否有人乘坐进行效果对比。实验过程中,PID控制器的参数经过反复调节,最终确定P为8.7,I为1.2,D为0.8,控制效果基本达到最优。
5.1 无人乘坐情况
模糊PID控制和传统PID控制在无人乘坐的情况下的速度曲线和误差曲线分别如图5,图6所示。从图中可以看出模糊PID控制能很好的控制速度的各个运行阶段,而且误差较小,但是模糊PID控制在机器人启动和制动时控制效果较差,而且运行期间产生的误差也比模糊PID控制大。故模糊PID与PID相比,控制精度高,机器人启动和制动的过程更平稳。
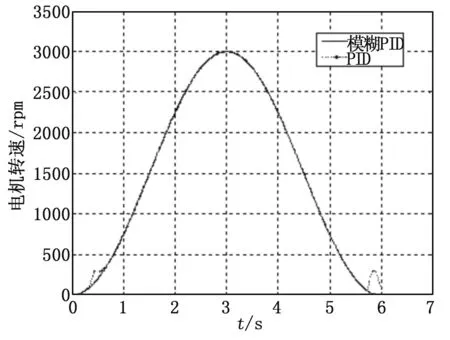
图5 无人乘坐时速度响应曲线
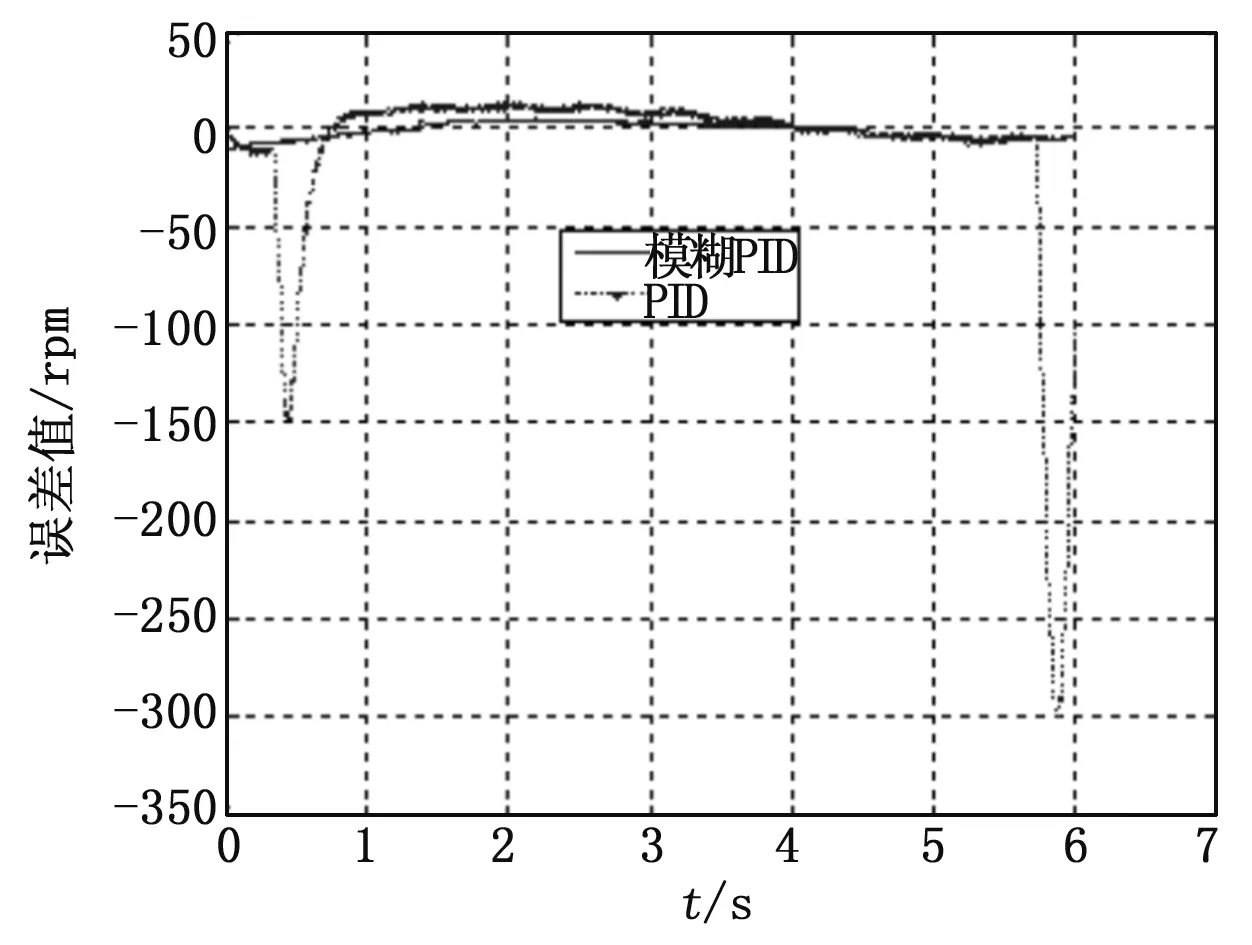
图6 无人乘坐时误差曲线
5.2 有人乘坐情况
模糊PID控制和传统PID控制在有人乘坐的情况下的速度曲线和误差曲线分别如图7~8所示。有人乘坐时,模糊PID仍能够很好的控制速度的各个运行阶段,所产生的误差也比较小,而PID控制助行机器人启动和制动的时候产生的误差比无人乘坐时更大,速度波动也更大,无法保证机器人启动和制动过程的平稳性,对乘坐者的冲击力也较大,故平稳性和舒适性较模糊PID控制要差很多。
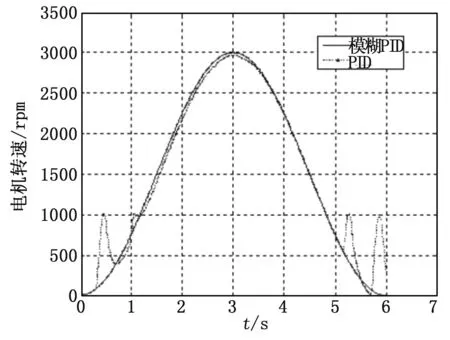
图7 有人乘坐时速度响应曲线
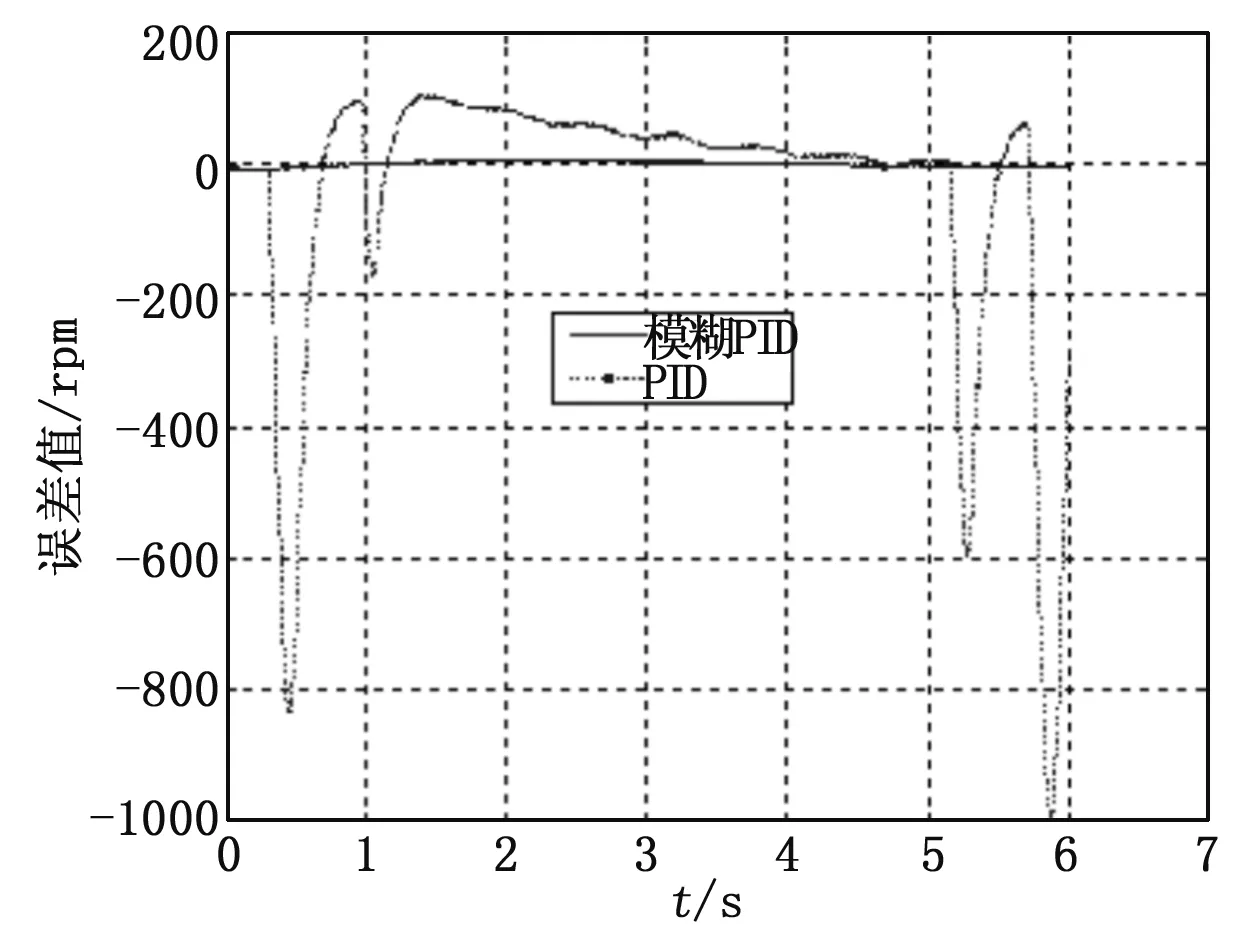
图8 有人乘坐时误差曲
6 小结
本文为了优化助行机器人的调速性能,保证爬楼过程的平稳性和乘坐者的舒适性,建立了助行机器人调速系统的数学模型,设计了速度给定曲线,提出了采用模糊PID控制来设计核心控制器,并与传统PID控制方法在是否有人乘坐的两种情况下分别进行了对比。
仿真结果表明,在助行机器人调速控制系统中,模糊PID控制比传统PID控制精度更高、误差更小、平稳性和舒适性更强都优于传统PID控制。
[1] 梁桥锋,李 烁,关贵平.多功能智能机器人[J].电子制作,2015(4):70-71.
[2] 李雪莲.老年智能机器人设计研究[J].机械设计,2014,31(4):100-105.
[3] 秦海春.智能机器人自主导航行进控制技术研究[D].合肥:合肥工业大学,2014.
[4] 宋慧滨,徐 申,段德山.一种直流无刷电机驱动电路的设计与优化[J].现代电子技术,2008,31(3):122-124.
[5] Evans P D, Brown D. Simulation of Brushless DC Drive [J]. IEEE PROC. Pt. B. Elect. Power APP1(UK)Sep,1990,137:299-308.
[6] 王 凌,刘卫国.基于模糊 PI 控制的无刷直流电机调速系统仿真[J].计算机仿真,2009,26(10): 186-189.
[7] 谢仕宏.MATLAB 控制系统动态仿真实例教程[M]. 北京:化学工业出版社,2008: 92-103.
[8] 王占礼,郭化超,陈延伟,等.助行梯机器人翻转爬升传动系统设计与仿真分析 [J].机械传动,2014,38(2):78-82.
[9] 李志鹏,杨凤英,方玉良.无刷直流电机的控制及其建模仿真[J].森林工程,2013,29(3):83-86.
[10] 白建社.电梯系统控制器设计及S 曲线优化研究[D].西安:西北工业大学, 2000,3.
Research on Fuzzy PID Speed Control System of Walker Aid Robot
Hou Weilong
(Nanjing University of Science and Technology,Nanjing 210094,China)
The walker aid robot has very high demand on the dynamic characteristics of the system, and in the process of climbing stairs, it also has many uncertain factors. So the result of single closed-loop feedback control system based on the traditional control strategy is bad and unsatisfactory. In the circumstances, I have established the mathematical model of the system, and designed the double closed loop speed control system based on fuzzy PID compared with the traditional PID. In order to guarantee stability and comfortable of the process, I have designed the sine speed curve according to the speed of elevator running curve. The simulation results show that fuzzy PID control is better than traditional PID control, starting and braking process is smoother, more comfortable.
walker aid robot; double closed-loop; sine speed curve; fuzzy PID
2016-07-25;
2016-08-19。
江苏省科技项目支撑计划(BE2012175)。
侯伟龙(1991-),男,河南鹤壁人,硕士,主要从事智能机器人控制技术方向的研究。
1671-4598(2017)01-0054-03
10.16526/j.cnki.11-4762/tp.2017.01.016
TP242.6
A
