旋转调制捷联惯性导航装备自抗扰控制技术
2017-02-25王志鑫时小飞杨开伟李娟娟
王志鑫,时小飞,杨开伟,李娟娟
(1. 中国人民解放军92941部队,葫芦岛 125001;2.中国电子科技集团公司第五十四研究所,石家庄 050081;3.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
旋转调制捷联惯性导航装备自抗扰控制技术
王志鑫1,时小飞2,3,杨开伟2,3,李娟娟2,3
(1. 中国人民解放军92941部队,葫芦岛 125001;2.中国电子科技集团公司第五十四研究所,石家庄 050081;3.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
针对捷联惯性导航装备旋转调制非线性控制问题,本文提出采用非线性自抗扰控制技术代替传统线性PID控制技术的控制策略。
捷联惯导;旋转调制;自抗扰控制;扩张状态观测器
1 引言
捷联惯性导航装备的旋转调制技术是一种自校正方法,它能在不使用外部信息的条件下,通过对惯性测量单元的转动来调制陀螺和加速度计的常值偏差,提高系统长时间导航能力[1]。在实际应用中,通常采用直流力矩电机直接驱动的方式实现捷联惯性导航装备的旋转调制,当系统受到较大的冲击作用时,直流力矩电机控制系统由线性系统变成一个非线性控制系统,采用传统的PID控制策略可能造成控制系统不稳定甚至“飞车”,本文重点对自抗扰控制技术(ADRC)在捷联惯性导航装备旋转调制控制系统中的应用进行可行性进行研究。基于跟踪微分器和扩张状态观测器的自抗扰控制技术是适应数字控制技术时代潮流,吸收现代控制理论成果并发扬PID控制思想精髓的一种不依赖于系统精确模型的非线性鲁棒控制技术,它用配置非线性结构替代极点配置进行控制系统的设计,依靠期望轨迹与实际轨迹的误差大小和方向来实施非线性反馈控制,是一种基于过程误差来减小误差的方法[2]。其最突出的特征是把作用于被控对象的所有不确定因素都归结为未知扰动,直接利用对象的输入输出对未知扰动进行估计并通过前馈自动给予实时补偿。本文在LabVIEW平台上对ADRC进行仿真,研究这种非线性控制器对捷联惯性导航装备旋转调制控制系统模型的适应性和鲁棒性。
2 捷联惯性导航装备旋转调制控制系统工作原理
捷联惯性导航装备旋转调制控制系统采用H桥式电路驱动永磁直流力矩电机的直接驱动方式[3],通过控制桥式电路输入端PWM信号的占空比来调节力矩电机的转速与转向。稳定控制系统的原理框图如1所示,系统采用光纤陀螺作为角速率传感器,用以实时检测平台的转动速率,通过积分和滤波后,可消除陀螺的零位漂移并获得回路的反馈量即平台的实际转动角度位置,目标角度位置与实际角度位置经过自抗扰控制算法后形成控制量输出,控制量调节PWM信号的占空比大小,从而改变控制电机两端的电压以调节电机的转速和转向,PWM输出经过功率放大后加载至力矩电机,力矩电机驱动武器系统转向目标角度位置。图中虚线框图部分所包含的自抗扰控制算法(ADRC)实现、PWM波形产生以及陀螺位置信号处理,都由TMS320F2812芯片完成。
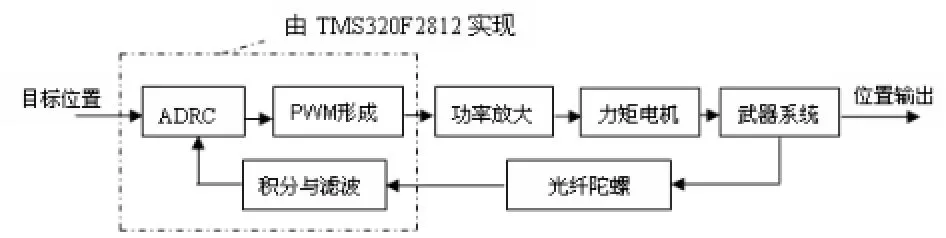
图1 系统原理框图
3 捷联惯性导航装备旋转调制自抗扰控制方案
自抗扰控制器(ADRC)是一种不依赖于系统模型的新型非线性控制器,具有收敛速度快、精度高、抗干扰能力强等特点,已经在炉温控制、异步电机调速系统控制、高速车床等不同对象的实际控制系统中得到应用[4-5]。
常用的二阶自抗扰控制器的结构如2所示,主要包括跟踪微分器(TD)、扩张状态观测器(ESO)和非线性组合反馈(NSEF)等功能模块。
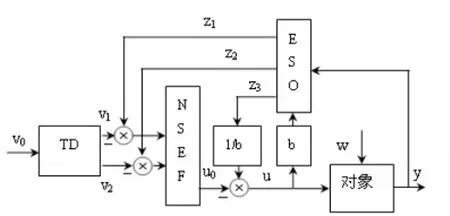
图2 二阶自抗扰控制器结构框图
3.1 控制对象
系统采用力矩电机直接驱动负载的控制方式,在机械设计时保证了系统的谐振频率足够高,电机与负载之间可近似为纯刚性连接,因此,电机电枢控制电压Ua与负载平台转速V之间的传递函数可简化为

该电机与负载模型是一个典型的二阶系统,式中,J∑为系统总的转动惯量;La为电机电枢回路电感;Ra为电机电枢回路电阻;Cm为电机力矩系统;Ce为电机反电动势比例系数。
3.2 跟踪微分器(TD)
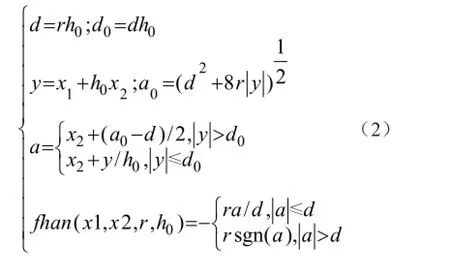
跟踪微分器用以对不光滑的输入信号V0进行预处理,通过“安排”过渡过程V1,能快速无超调地跟踪输入信号V0并能很好地给出其微分信号V2,本系统中V0即为目标角度位置。二阶跟踪微分器的结构形式为
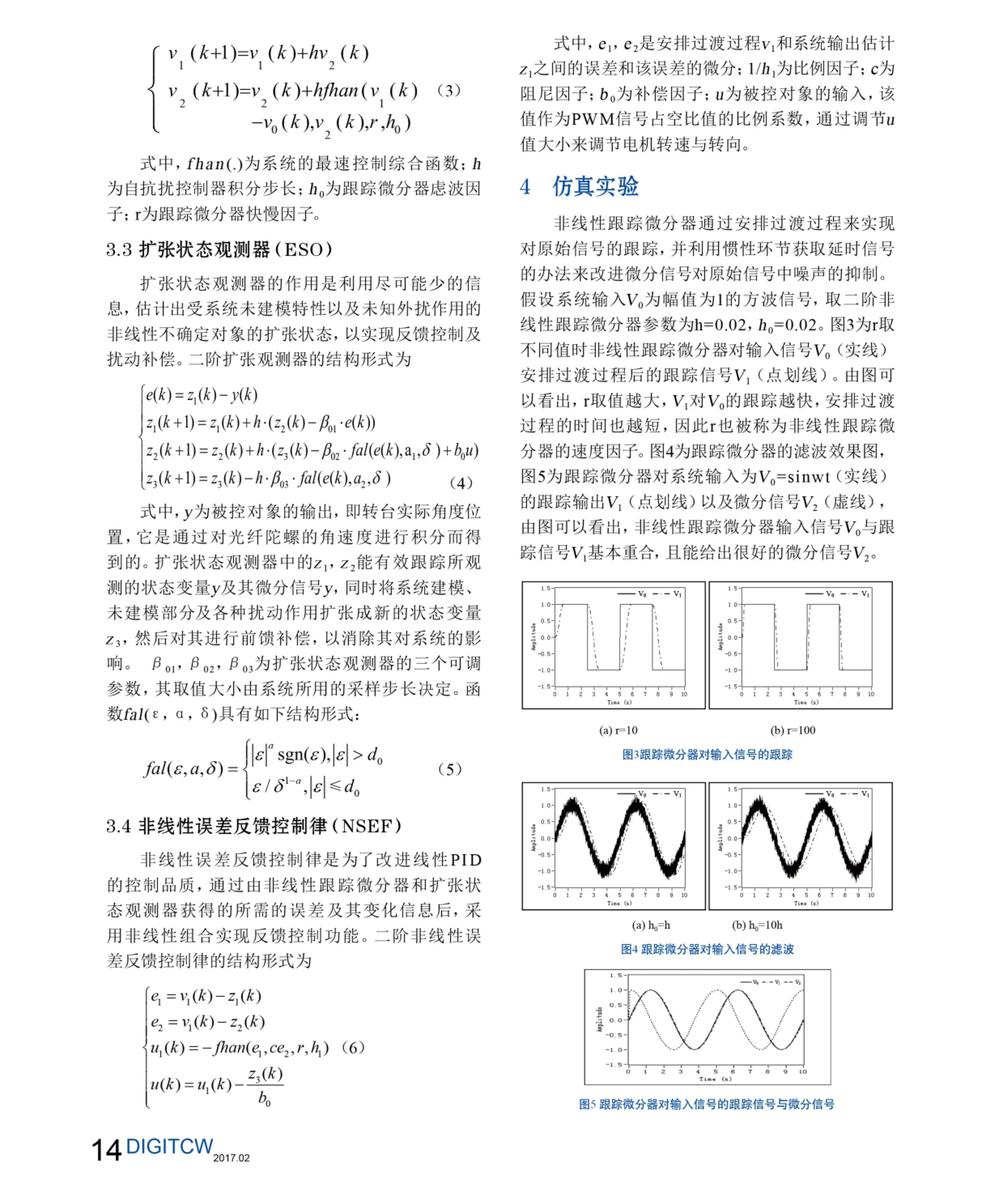
自抗扰控制器鲁棒性好的原因是因为扩张状态观测器利用“扩张状态”估计出控制对象模型的不确定因素和干扰的实时值。设有系统
假定系统中函数cos(0.4πt)是已知的输入,函数sign(sin(0.4πt))+sin(0.4πt )为系统未建模部分或外部扰动。建立如下的扩张状态观测器
扩张状态观测器中的参数取值如下:h=0.02,δ=h,α1=0.5,α2=0.25,β01=400,β02=2000,β03=10 0 0 0。利用该扩张状态观测器对状态x1=cos(0.4πt)、x2(x1的微分)和被扩张状态x3=sign(sin(0.4πt)+sin(0.4πt)的实时估计的仿真结果分别如图6a,6b,6c所示。
图7a,7b分别是自抗扰控制器在输入(实线)为阶跃信号和正弦信号时的响应曲线(点划线),由图可以看出自抗扰控制器对阶跃信号和正弦信号输入均能很好的进行跟踪,并且超调量很小。图8和图9分别为自抗扰控制器在存在正弦和方波干扰时的阶跃响应和控制量输出曲线。由仿真结果可知,自抗扰控制器在一套控制参数不变的情况下,通过改变控制量输出能抑制不同大小、不同种类的干扰对控制系统的影响,体现出良好的鲁棒性和抗干扰性。
图6 扩张状态观测器对输入信号的估计
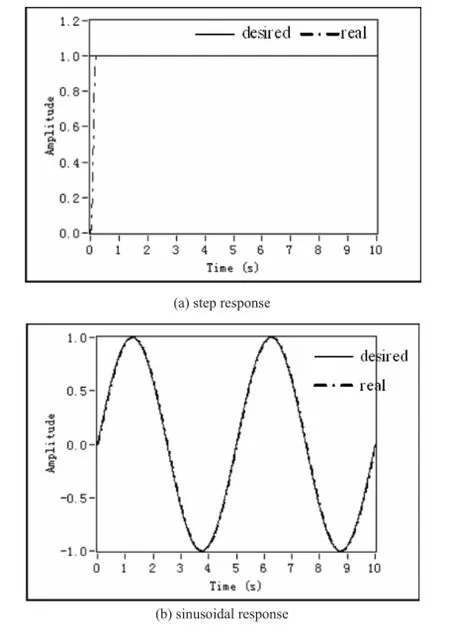
图7 ADRC的阶跃响应曲线和正弦响应曲线
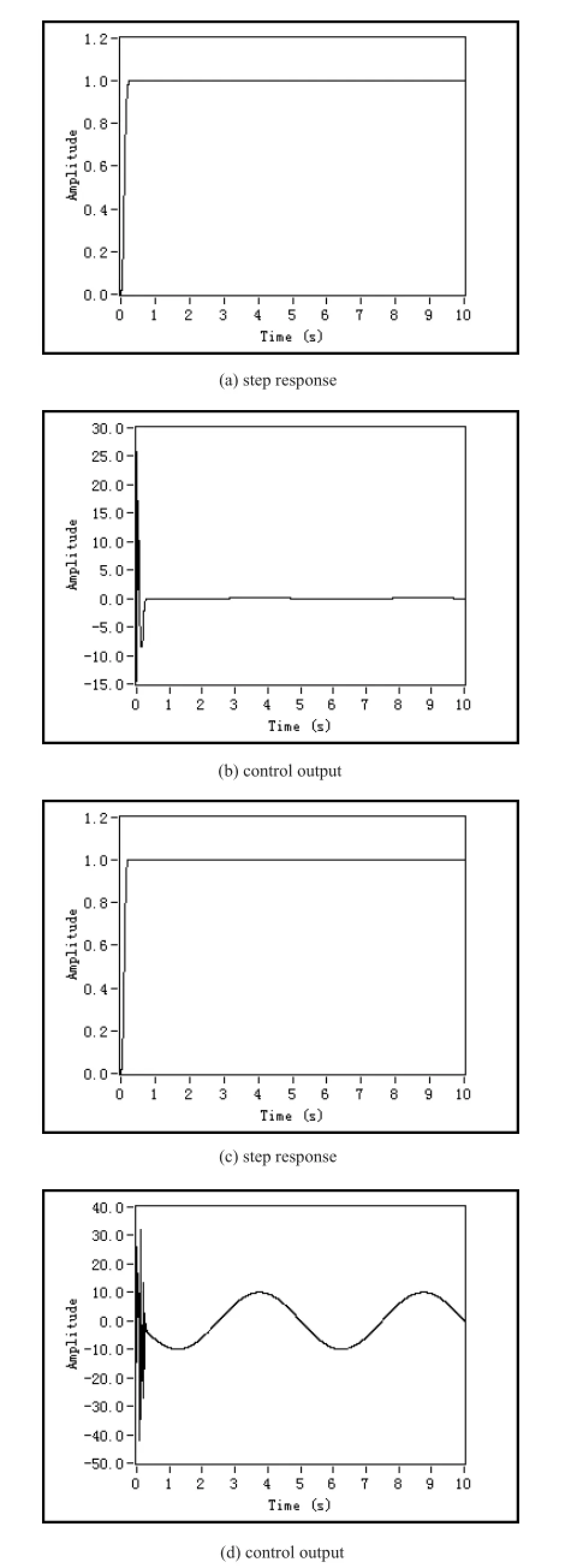
图8 幅值分别为1和100的正弦干扰条件下阶跃响应曲线和控制量曲线
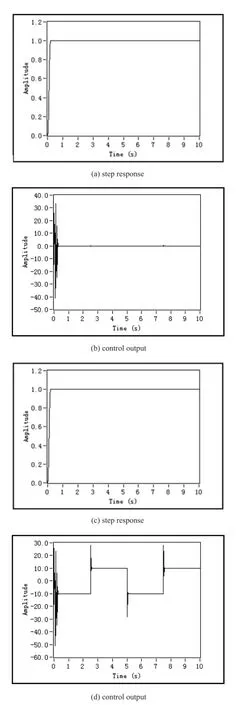
图9 幅值分别为1和100的方波干扰条件下阶跃响应曲线和控制量曲线
5 结束语
捷联惯性导航装备的旋转调制系统通常采用直流力矩电机直接驱动负载的方式实现,系统在复杂外界干扰条件下,直流力矩电机控制系统由线性系统变成一个非线性控制系统,采用传统的线性控制策略可能造成控制系统不稳定,重点对ADRC在捷联惯性导航装备旋转调制控制系统中的应用进行可行性进行研究。本文采用LabVIEW对捷联惯性导航装备旋转调制自抗扰控制技术进行了仿真分析,仿真分析结果表明,自抗扰控制器在一套控制参数不变的情况下,通过改变控制量输出能抑制不同大小、不同种类的干扰对控制系统的影响,具有良好的鲁棒性和抗干扰性,能够应用于捷联惯性导航装备旋转调制控制系统。■
[1] 杨建业.捷联惯性导航装备旋转调制技术研究[J].电光与控制,2009,16(12):30-33
[2] 韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002, 9(3): 13-18
[3] James P. Quinn, Dual Elevation Weapon Station and Method of Use [P], United States Patent, 2009.2.
[4] 焦连伟.电力系统自抗扰控制器[J].清华大学学报,1999, 39(3): 27-29
[5] 冯光.采用自抗扰控制器的高性能异步电机调速系统[J].中国电机工程学报,2001, 21(10):55-59
GSMA公布2017世界移动大会-上海最新细节
春节前夕,GSMA公布了2017世界移动大会-上海的最新进展,本届大会将于6月28日(周三)至7月1日(周六)在上海新国际博览中心举行。最新进展包括GSMA宣布推出2017亚洲移动大奖(Asia Mobile Awards)。此外,GSMA还提供了世界移动大会-上海会议项目相关的更多细节,并公布了新增参展商名单。
GSMA首席营销官Michael O’Hara表示:“我们期待举办第二届亚洲移动大奖,并设立了新的类别和奖项,以表彰业界最前沿的企业、个人、产品和服务。我们也很高兴能拓展2017世界移动大会-上海的会议项目,以内容更丰富的主题演讲和峰会探讨移动和相关行业的全趋势。”
GSMA宣布举办2017亚洲移动大奖
GSMA今天宣布将于2017世界移动大会-上海期间举办亚洲移动大奖。亚洲移动大奖旨在表彰亚洲移动产业最杰出的成就和创新,将由顶尖的独立行业专家组成的评审团进行评选。亚洲移动大奖将涵盖五大类别的13个奖项。
2017亚洲移动大奖参赛报名将于1月25日(周三)至4月12日开放,GSMA将于6月初公布入围者名单,于6月28日(周三)世界移动大会-上海期间举行的“亚洲移动大奖颁奖典礼暨招待晚宴”上向获奖者颁奖。2017亚洲移动大奖向整个移动生态系统的企业开放;奖项类别、评选标准和截止日期的完整列表可在http://www.asiamobileawards.cn/上查阅。
会议项目将首次延长至三天
世界移动大会-上海会议项目首次延长至三天,即6月28日(周三)至6月30日(周五),并于上海新国际博览中心W3展馆与GSMA创新城市同场举行。会议期间将举行四场主题演讲,从不同角度阐释世界移动大会-上海的主题——“势在人为”(The Human Element)。主题演讲包括“势在人为”、“运营商之势在人为”、“社会之势在人为”以及“行业之势在人为”,演讲嘉宾均为来自移动生态系统和相关行业领域的企业高管。
大会还将举行聚焦行业趋势的12大峰会:互联汽车峰会、数据安全峰会、数字消费者峰会、企业及云技术峰会、未来技术峰会、全球终端峰会、物联网峰会、MMIX亚洲峰会、运营商转型策略峰会、网络演进峰会、行业转型峰会、虚拟现实及增强现实峰会。
已确认参加世界移动大会-上海的新增参展商
GSMA公布了将参加世界移动大会-上海展览并展出最新移动产品和服务的新增展商名单。最新确认的参展商包括FiberHome、金立、GLOBALFOUNDRIES、杭州华三通信技术有限公司、亨通光电、香港应用科技研究院、Lora联盟(Lora Alliance)、美图公司、香港电讯盈科有限公司(PCCW Global)、罗德与施瓦茨(Rohde & Schwarz)、意法半导体(STMicroeletronics)和西部数据(Western Digital)等。更多展览详情,请访问www.mwcshanghai.cn/exhibition.
参与2017世界移动大会-上海
如需了解有关2017世界移动大会-上海的更多信息,包括参加会议、展览、合作或赞助方式,请访问www.mwcshanghai.cn。还可通过LinkedIn、新浪官方微博www.weibo.com/mwcshanghai,以及在微信里搜索“GSMA_MWCS”关注GSMA微信订阅号,了解世界移动大会-上海的最新进展。
ADRC Control Technology in Rotation Modulation of Inertial Navigation System
Wang Zhixin1, Shi Xiaofei2,3, Yang Kaiwei2,3,Li Juanjuan2,3
(1.92941Unit, the People’s Liberation Army, Huludao, Liaoning, 125001; 2.The 54th Research Institute of CETC, Shijiazhuang, 050081; 3.State Key Laboratory of Satellite Navigation System and Equipment Technology, Shijiazhuang, 050081)
To solve the nonlinear control problem of inertial navigation system rotational modulation, a nonlinear active disturbance rejection control technology strategy is proposed to instead of the traditional linear PID control technology.
SINS; rotating modulation; ADRC; ESO
10.3969/J.ISSN.1672-7274.2017.02.003
TN96
A
1672-7274(2017)02-0012-06
