空间滤波器水声信号预处理方法研究
2017-02-22王少娟张智敏姚金杰王黎明
王少娟,张智敏,姚金杰,王黎明
(中北大学信息探测与处理技术研究所,山西 太原 030051)
空间滤波器水声信号预处理方法研究
王少娟,张智敏,姚金杰,王黎明
(中北大学信息探测与处理技术研究所,山西 太原 030051)
浅水水声信道受多径传播、时变和空变等特性的影响,由水听器直接观测到的信号大多是信噪比低、多种信号叠加而成的复杂信号,难以准确提取特征信息及信源分离。针对以上问题,提出基于空间滤波器的多源复杂水声信号的预处理方法。该方法通过Hilbert变换将直接观测信号构造成解析信号来抑制虚像,使用波束形成算法来实现对方向角的选择,在指定方位角下得到期望信号。仿真及试验结果表明:信噪比为0dB时,通过空间滤波器对多源复杂水声信号进行预处理,可以有效地抑制噪声,并有效区分处于同一时间段、同一频段的多个源信号,经处理后的信号与源信号的相似度可达0.9853,对实际信号处理也可达到较好的效果,解决时频域很难处理的问题,进而为后续的研究工作提高精度。
浅水水声信道;空间滤波;波束形成;Hilbert变换;信源分离
0 引 言
在实际水声信号处理中,浅水水声信道是一种极为复杂多变的信道[1],受到多径干扰、带宽窄等影响,存在着难以确定的干扰和各种噪声,对后续处理有严重影响[2]。一般情况下,对多源复杂水声信号进行时域或者时频域处理,处理方法主要是时域截取或频域滤波,去除干扰信号和噪声[3]。但是,当多个源信号处于同一时间段和频带时,只在时频域对信号进行处理已经无法达到要求[4],因而,在空间域对多源复杂水声信号进行处理迅速发展起来[5]。若多个源信号来自于不同的方位,使用空间滤波器来实现对方位角的选择[6],将多个源信号区分开来,从而得到更为纯净的源信号,为下一步工作奠定基础。
本文选用一种较为常见的空间滤波器——波束形成器,在低信噪比情况下,对多源复杂水声信号进行处理,当多个源信号处于同一时间段、同一频率,但是来自于不同的方位时,波束形成器可以有效抑制干扰信号,而使期望信号通过,这就能很好地解决时频域对信号很难处理的弊端[7]。通过计算机仿真来验证该算法的可行性,同时,对实际采集到的水声信号进行处理。
1 基于空间滤波的算法原理
空间滤波最早是1952年由Eliai等在光学信号处理领域中提出的[8],后来Aroyan等又将空间滤波应用到红外分析系统中[9],而后空间滤波被应用在图像处理领域中,改善了影像的质量,Simaan等[10]利用空间滤波实现了提高微弱信号检测性能。现今,将空间滤波应用到阵列信号处理中,可以有效抑制噪声和干扰信号。
一般而言,空间域信号就是空间传播的信号[11]。由于水下信道的复杂性,使用单个传感器来观测信号可能会遗漏很多重要信息,选用传感器阵列代替单个传感器来接收信号,可以获得更多时间和空间上的信息。
1.1 算法实现具体步骤
1)使用带通滤波器对水听器阵列直接观测到的信号s(t)进行时频域滤波,得到阵列信号s′(t)。
2)求得阵列信号s′(t)的协方差矩阵R=E[x(t)xH(t)]。
3)使用Hilbert变换对阵列信号s′(t)构造解析信号x(t)。
4)对信号x(t)进行波束形成,确定期望信号方位角,得到期望信号。
算法的整体框图如图1所示。
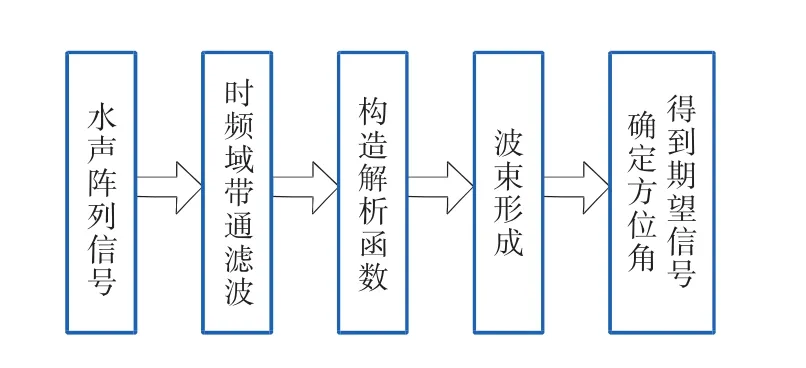
图1 算法的整体框图
1.2 波束形成算法
波束形成是最为常见的一种空间滤波,波束形成器也被称为空间滤波器[12-13]。在实现定位、跟踪、参数估计、波形恢复、目标检测等方面,波束形成起着非常重要的作用[14]。波束形成器使用特定的权矢量加权,来检验指定方位的信号。因加权时强调一个或者几个方位的信号,可以衰减其他方位的信号,得到指定方位的信号。波束形成实现对方向角的选择,类似于时域滤波实现对频率的选择。
波束形成利用一维M元均匀线性传感器阵列来观测信号,对空间各阵元输出的信号进行延时、复数加权、求和等运算来对信号的相位和幅度进行调整,如图2所示。
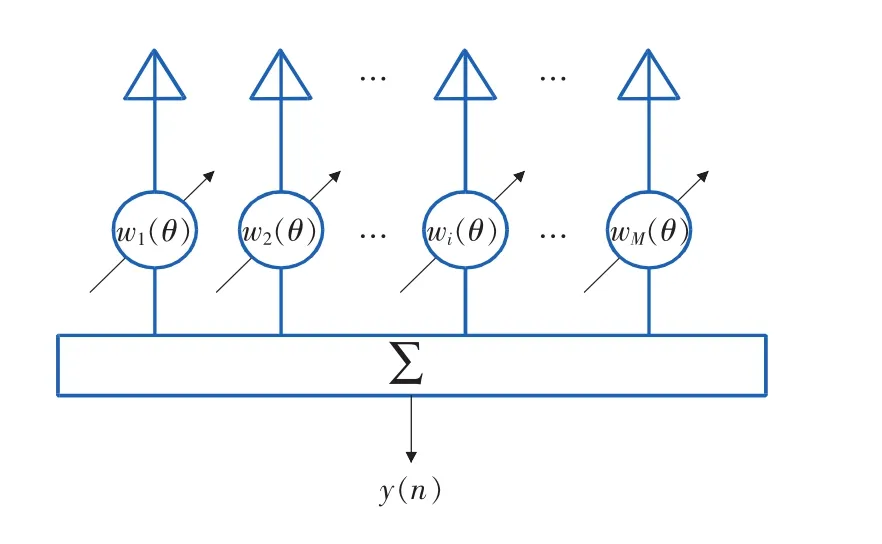
图2 波束形成算法结构
经过复数加权后阵列的输出为

阵列输出的矢量表示为

其中:

为了在期望方向θ上形成主瓣,对各个阵元的输出进行时延补偿,常规波束形成的权矢量为

常规波束形成的输出功率为

其中矩阵R=E[x(t)xH(t)]为阵列输出信号x(t)的协方差矩阵,N为波束形成器的快拍数。
常规波束形成器在空间方位角的间隔大于阵列波束主瓣宽度时,可以将不同方向上的源信号区分开来,如果多个源信号的空间方位角小于阵列波束出版宽度时,将会出现无法分辨多个信号的情况。若是想要提高常规波束形成的角分辨率,需要增加阵元个数或者阵元间隔。
1.3 解析信号的构造
在实际水声信号传输过程中,水声采集系统采集到的信号均为实数形式,下面以余弦函数为例,假设实信号为

对传感器阵列接收的信号进行波束形成,得到波束图如图3所示。

图3 实数形式信号波束图
从图中可以看出:空间采样实数形式信号的波束图中有两个关于0°对称的主瓣,也即存在一个虚像。那么,在对复杂信号空间滤波后会得到两个关于0°对称的角度,从而无法分辨期望信号和干扰信号,将会影响整个系统的正常工作。因此,需要构造一个解析信号,来抑制虚像的产生。
对一个实数形式的信号进行Hilbert变换,可以表示为

从式中可以看出,对实数形式信号f(x)进行Hilbert变换,其本质就是对f(x)进行了一次滤波,其脉冲响应为

其频率响应为

其中:
从式(10)中可以看出,对采集的实数形式信号进行Hilbert变换,相当于对该信号的频谱进行了π/2的相移。因此可以使用Hilbert变换来构造解析信号,解析信号可以表示为

使用Hilbert变换构造式(12)实信号的解析信号可以表示为

对解析信号进行波束形成,得到波束图如图4所示。

图4 解析信号的波束图
从式(13)中和图4中可以看出,通过构造空间采样信号的解析信号,可以有效抑制波束主瓣的虚像,以便于后续信号的处理以及角度的搜索。
2 仿真检验与分析
根据以上算法,进行计算机仿真实验,对发送信号均使用频率为30kHz的正弦波进行调制,并模拟水声信道,噪声为零均值白噪声,信噪比为0 dB,分别模拟一维8元、16元均匀线性传感器阵列来接收信号,阵元间距为半波长,来验证波束形成算法的可行性。波束形成算法按以下步骤进行:
1)用通带为20~40kHz的带通滤波器对传感器阵列直接观测的信号进行滤波。
2)由观测数据求得阵列输出信号x(t)的协方差矩阵R=E[x(t)XH(t)]。
3)对阵列输出信号x(t)进行Hilbert变换,构造解析信号。
4)对解析信号进行常规波束形成,确定方位角,得到期望信号。
2.1 信噪分离仿真
只存在1个源信号,信号源位于-45°方向,发送信号是随机选取的1组二进制序列。
源信号序列:01000101011011
图5为模拟观测信号的波束图,图6分别模拟水听器1的观测信号、时频域滤波后的信号和空间滤波后的信号。从图6中可以看出,通过空间滤波后的信号,可以有效地抑制噪声,通过波束形成后,增强了源信号方向的信号功率,提高了信噪比。计算处理后的信号与源信号的相似度,相似系数为0.9853。

图5 仿真单信号源波束图
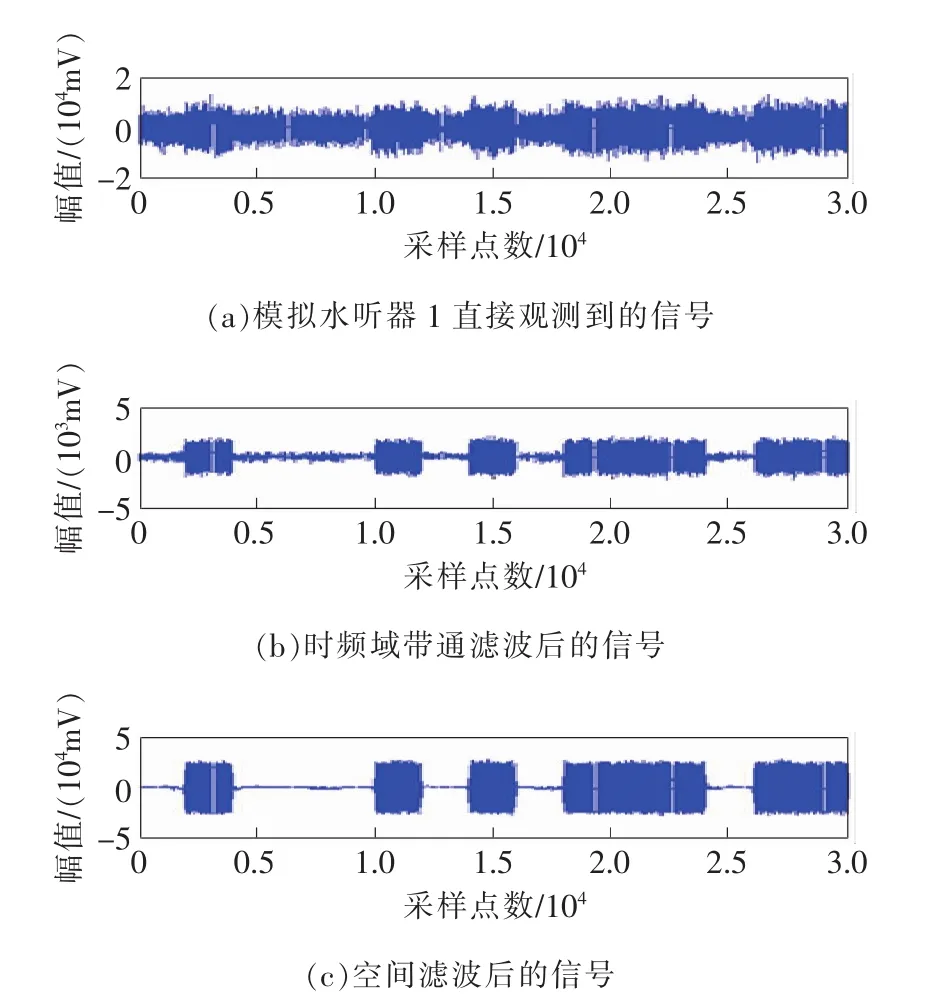
图6 对单信号源模拟观测信号处理过程
2.2 多个源信号分离仿真
存在两个源信号,两个信号源分别位于-45°和30°方向,发送信号是两组随机选取的二进制序列。
源信号1序列:010001010111011
源信号2序列:010110001101001

图7 仿真双信号源波束图
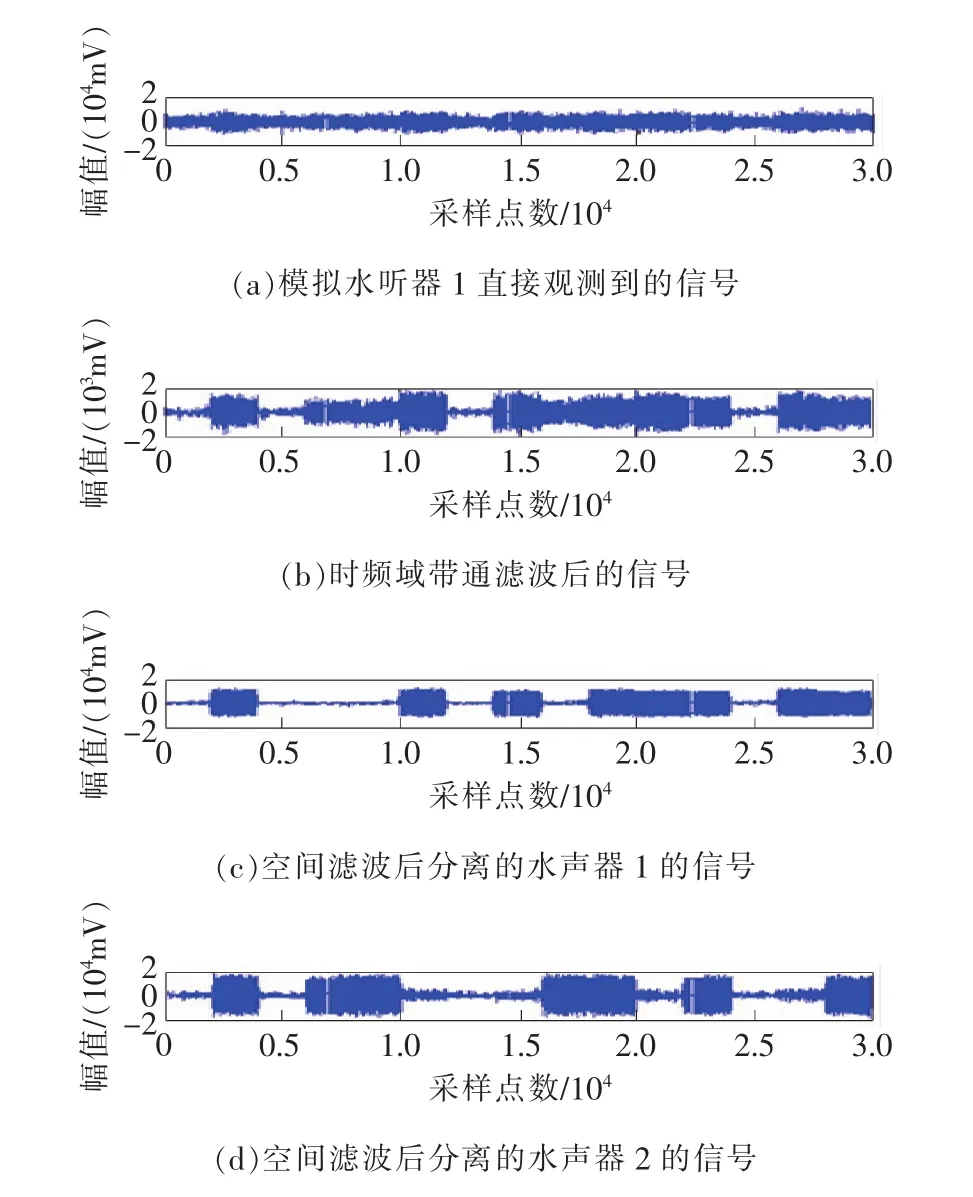
图8 对双信号源模拟观测信号处理过程
图7和图8为双信号源的仿真波速图和处理过程,可以看出,模拟一维8元等距传感器阵列采集的混合信号通过波束形成之后,在-45°方向和30°方向形成波束指向,不仅可以抑制噪声,而且可以将两个源信号区分开来,能够很好地保存信号的信息。计算处理后的信号与源信号的相似度,相似系数分别为0.9602和0.9545。计算机仿真实验验证了空间滤波的可行性。
当期望信号和干扰信号的空间方位角小于阵列波束出版宽度时,将会出现无法分辨多个信号的情况。例如,当期望信号和干扰信号分别来自-10°方向和3°方向,8元线阵无法分辨信号的方位角,如图9所示。本文采用增加阵元个数来提高对信号方位角的分辨率,16元一维线阵波束如图10所示,增加阵元个数可以很好地提高对空间信号方位角的分辨率。
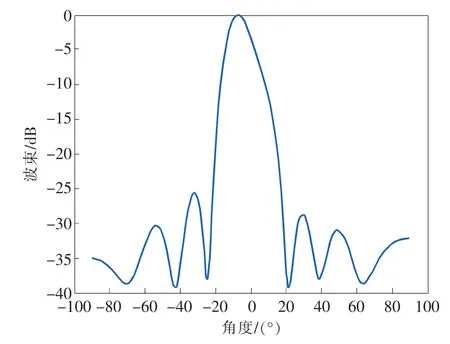
图9 8元一维线阵波束图

图10 16元一维线阵波束图
3 实际声阵列信号处理
水箱声信号采集实验的实验条件为:水箱的长宽高是120 cm×80 cm×100 cm,声源是由MSP430单片机控制信号发生器生成使用频率为29.8kHz的正弦波调制成二进制序列,使用放大倍数为20倍的功率放大器来驱动水声器发声,水声器处于水箱中部,距离箱底和水面大约20 cm,距离水听器阵列约为50 cm,由于实验条件有限,水听器阵列为一维8元均匀线性传感器阵列,阵元间距为2.5cm,采样频率为1mHz,采样点数为50000,实验中水声信号在传输过程中存在多径干扰和畸变。
3.1 信噪分离实际信号处理
1个水声器发声,该水声器发出的水声信号序列为:01000010101110110,方位角为-20°方向。
图11为实际观测信号的波束图,图12分别为水听器1的观测信号、时频域滤波后的信号和空间滤波后的信号。从图12中可以看出,阵元接收信号存在严重的噪声和畸变,采集的实际信号通过带通滤波器滤掉了一些高频信号和低频信号,但是噪声还是很明显,通过波束形成后,在-20°方向形成了波束指向,噪声可以被有效地抑制,同时,增强了信号源方向信号的功率。计算处理后的信号与源信号的相似度,相似系数为0.8346。
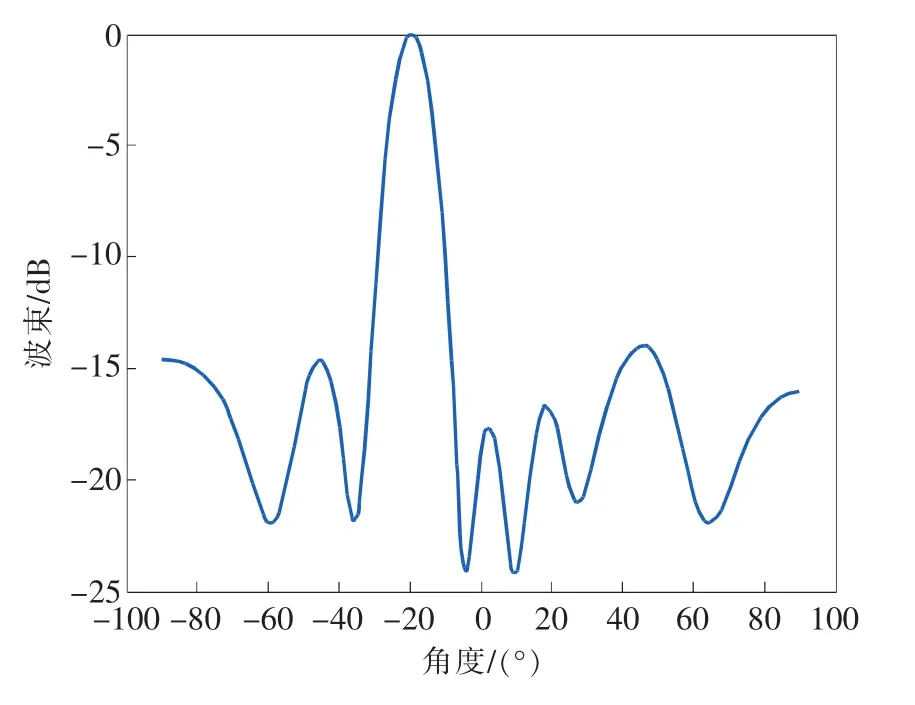
图11 实采单信号源波束图
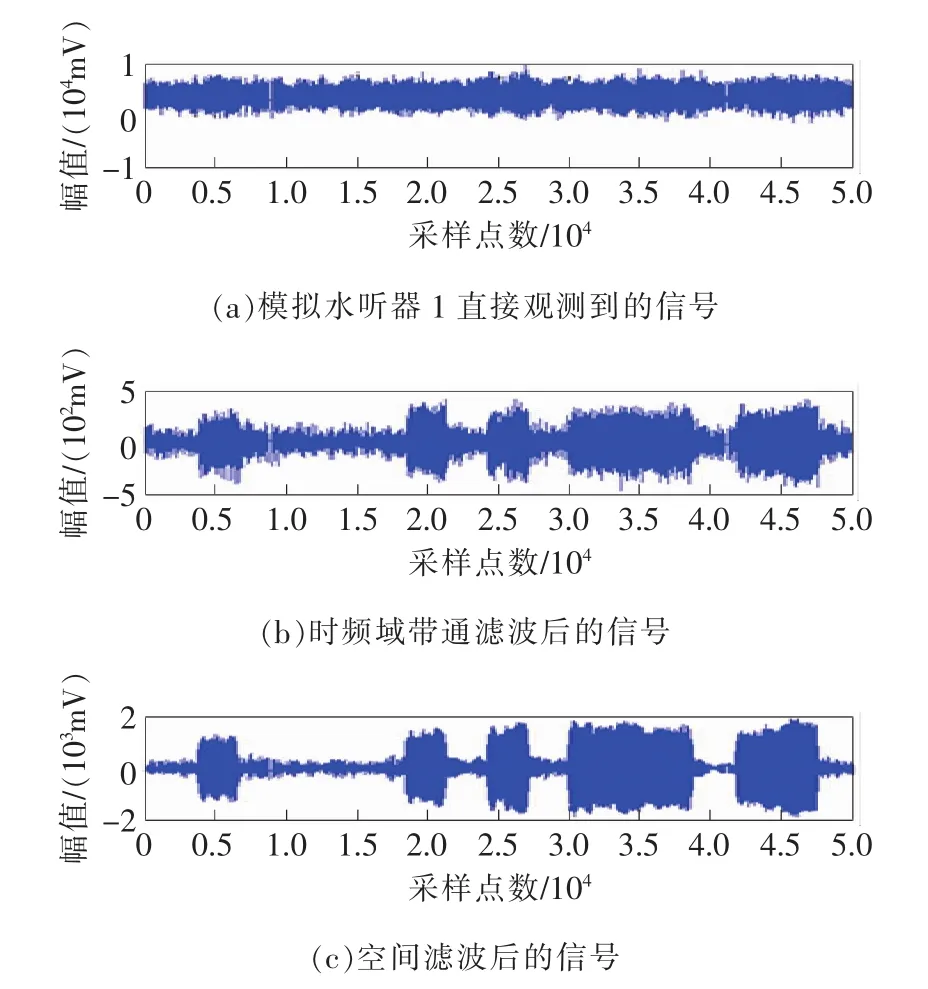
图12 对单信号源实测信号处理过程
3.2 多源实际信号处理
选取两个水声器同时发声,水声器1发出的水声信号序列为:01000010101110110,方位角为-20°方向;水声器2发出的水声信号序列为:01100011111001101,方位角为30°方向。

图14 对双信号源实测信号处理过程
图13为实采双信号源波束图,可以看出,一维8元等距水听器阵列采集的混合信号通过波束形成之后,在-20°方向和30°方向形成波束指向,图14为双信号源实测信号处理过程,可以看出,通过波束形成可以有效地抑制噪声,从波形也可以看出空间滤波后的信号与源信号相似。计算处理后的信号与源信号的相似度,相似系数分别为0.7678和0.6983。通过上述结果的相似系数可以说明空间滤波可以实现对混叠水声信号的分离。实验验证了空间滤波算法的可行性。
4 结束语
本文提出使用空间滤波结合Hilbert变换来实现对复杂水声信号进行预处理,可以有效地分离噪声,并有效区分处于同一时段、同一频段的多个源信号,同时增强了期望信号的功率,克服了在时域无法对同一时段和同一频段无法处理的困难。本文应用了计算机仿真信号、仿真信道进行算法检验,其信号预处理效果较好;进行了水箱实际声信号采集,在处理实际水箱声信号时,经过空间滤波后可以得到较好的结果。但是,海洋中的环境更为恶劣,这对于信号处理有很严重的影响。因此,还需要对算法进行深入研究和改进,特别是空间滤波信号预处理模型的稳定性和鲁棒性。
[1]贾宁,黄建纯.水声通信技术综述[J].物理,2014(10):560-657.
[2]董姝敏.水声信号处理的盲信号分离方法研究[D].哈尔滨:哈尔滨工程大学,2012.
[3]邝爱华,贺宏,谭文秀.几种典型的时频信号分析方法研究[J].无线互联科技,2013(8):161.
[4]朱维杰.宽带水声阵列信号处理的原理及方法研究[D].西安:西北工业大学,2003.
[5]BUCKLEY K. Spatial/spectral filtering with linearlyconstrained minimum variancebeamformers[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1987,35(3):249-266.
[6]NAIDU P S.Sensor Array Signal Processing[M].Florida:CRC Press,2001:192-210.
[7]张小飞,汪飞,陈伟华.阵列信号处理的理论与应用[M]. 2版.北京:国防工业出版社,2013:225-227.
[8]少川.空间滤波器及其应用[J].激光与红外,1975(9):581-587.
[9]王瑜.基于空间滤波器的结构健康监测研究[D].南京:南京航空航天大学,2012.
[10]HANNA M,SIMAAN M.Arrays filters for sidelobe elimination[J].IEEE Journal ofOceanicEngineering,1985,10(3):248-254.
[11]孙超.水下多传感器阵列信号处理[M].西安:西北工业大学出版社,2007:118-119.
[12]赵拥军,陈辉,刘成城,等.宽带波束形成结构及算法研究[J].电子测量与仪器学报,2014,28(7):687-694.
[13]张书仙,李瑭,潘点飞.基于数字波束形成的多目标测控[J].国外电子测量技术,2014,33(8):73-77.
[14]BAI L,HUANG X.Observer-based beamforming algorithm for acoustic array signal processing[J].Acoust Soc Am,2011,130(6):3803.
(编辑:徐柳)
Study on preprocessing method of underwater acoustic signal based on spatial filter
WANG Shaojuan,ZHANG Zhimin,YAO Jinjie,WANG Liming
(Institute of Signal Capturing&Processing Technology,North University of China,Taiyuan 030051,China)
Due to characteristics including multipath propagation,time-varying and space-varying features of shallow water underwater acoustic channel,signals directly detected by hydrophone are mostly complex signals superposed by various signals with low signal to noise ratio.Thus,the feature information and accurate source separation cannot be obtained.To solve these problems,a preprocessing method of multi-source complex underwater acoustic signal based on spatial filter is put forward.The method constructs the signals observed directly into analytic signals through Hilbert transforming to suppress the virtual image and uses beamforming algorithm to select the direction angle and obtain desired signals under the specified azimuth angle.Simulation and test results show that in a simulation test,if the multi-source complex underwater acoustic signals are processed based on spatial filter when the signal-to-noise ratio is 0 dB,the noises can be effectively suppressed and several source signals at a same time period and same frequency band can be effectively distinguished.After the processing,the similarity between the processed signal and source signal can reach 0.985 3.It can also reach good effects in actual signal processing,solve the problems hardly to be solved in time-frequency domain and ensure high precision in follow-up research.
shallow water underwater acoustic channel;spatial filter;beamforming;Hilbert transform;source signal separation
A
:1674-5124(2017)01-0116-06
10.11857/j.issn.1674-5124.2017.01.024
2016-03-16;
:2016-05-10
国家自然科学基金(61471325);高等学校博士学科点专项科研基金(博导类)(20121420110006)
王少娟(1992-),女,山西长治市人,硕士研究生,专业方向为智能信息处理、水声信号处理。
