基于拉线式位移计的空间位移测量系统研制
2017-02-22周年强
周年强,刘 傲
(1.南京林业大学土木工程学院,江苏 南京 210037;2.同济大学土木工程学院,上海 200092)
基于拉线式位移计的空间位移测量系统研制
周年强1,2,刘 傲1
(1.南京林业大学土木工程学院,江苏 南京 210037;2.同济大学土木工程学院,上海 200092)
为解决目标点在空间移动时位移测量的难题,设计开发出一套空间位移测量系统。测量系统以LabVIEW作为软件开发平台,使用3个拉线式位移传感计、美国恩艾公司的USB数据采集卡作为硬件设备,以三站式空间定位算法作理论依据进行位移测量和数据计算。测量算法可靠、实用,在确定站点信息后(两站之间长度),系统能根据3组不断变化的拉线长度数据,实现对目标点在空间内位移的测量,得到x、y、z 3个维度上位移数值,并且在系统软件界面中实时显示目标的空间变化。试验结果表明:本系统具有结构简单、容易实现、显示直观、精度较高等优点,具有很好的实用性。
空间位移测量系统;三站式空间定位;LabVIEW;拉线式位移计
0 引 言
三维空间位移测量又称空间位置测量,是指通过一套测量系统即可得到目标点相对于参考点的空间位移信息,是三维坐标位移信息的一种测量技术。三维位移测量是目前测试领域中的一个重要的发展方向,在军工、航天航空、船舶与汽车、工业自动化控制等方面具有广泛应用[1-5]。
关于三维空间位移测量系统,目前比较成熟的产品主要有美国CSI公司的Vic-3D系统,它主要是利用两台高速摄像机,根据3D影像结合相关算法提供目标对象的全场三维形状、位移及应变数据。该系统需要充足稳定的光源,由于光学成像的特点,测量精度受操作人员的水平和经验影响较大,测试系统费用昂贵。美国的FARO公司使用激光和高精度的传感器实现对空间场景和测试对象的三维测试,其LaserTracker Vantage号称全球最佳、最易于操作和完善的激光跟踪仪,但同样费用不菲。国内外针对三维空间的测量做了大量的研究,Stephan Spiess,J. R.Mayer[6-7]提出基于激光跟踪仪的动态空间位移测量方法,并对其布局和性能情况做了详细的分析和论证;赵磊[8]采用三坐标测量仪进行空间动态测量,并对其动态误差进行了分析。杨会臣等[9]采用高速摄像机对振动台试验中模型试验的位移数据进行测量,结果显示该方法识别精度较高,能捕捉大量模型信息。目前针对位移数据的动态空间测量精度最高的是采用激光跟踪仪实现,但成本高,不适于普通工业测试环境。龚成[10]采用4个拉线位移计结合相应算法设计了一套测量系统,可以实现对空间位置进行较高精度的测量,但设备较复杂。本文提出一种基于3个拉线式位移计的空间位移测试系统,在降低传感器数量的情况下,系统的架设更加灵活和方便,同时还具有动态显示的功能。
1 测量系统数学模型的建立
拉线式位移计是通过拉线的伸展和收缩,带动内部轮毂的转动,继而引起紧密旋转感应器旋转,使后者输出一个与拉线拉出量成比例的电信号[11-12]。普通的拉线式位移计通常只是用来做一维长度上的测量,相对于其他形式的位移计具有安装尺寸小、结构紧凑、测量行程大、精度较高等特点。
将拉线式位移计应用在三维测量系统中,需要研究建立测量系统的的数学模型,即以测量点的三维空间位置坐标为研究对象,通过能测量的已知量根据几何知识和相关算法解算出测量点的空间位置坐标。
1.1 站点形式选择
根据在测试系统中使用拉线式传感器的多少,分为一站式、二站式、三站式、四站式以及其他。一站式空间测量采用了最少的拉线式位移计,但必须结合2个角度传感器来实现对目标点的空间定位。二站式也称三角测试法,系统通过设立2个测量基准点,与被测量目标点形成一个测量三角形,在该测量方法中,通过获得测量点与基准点的长度以及三角平面与基准面夹角就可以计算出被测量点的位置坐标。即该系统是2个位移计与1个角度计的结合。
三站式是通过设立3个测量基准点,根据空间模型特点,已知被测点与空间3个基准点的距离既可获得测点唯一确定的空间位置坐标,该方法无需角度传感器,如图1所示。四站式是在三站式的基础上增加了1个长度量,通过这个量可以对测量点进行多次迭代计算,最终达到校核测点信息的目的。此外更多的传感器可能被应用于测量系统,但与四站式相比只是数据的精度经过冗余数据的多次迭代被进一步提高。

图1 三站式测量原理示意图
1.2 测量系统模型的建立
本文采用三站式,以三维直角坐标系建立测量系统的数学模型,如图2所示。该系统模型的3个拉线式传感器分别放在A、B、C 3个位置,作为测量基站点,AB边长为L1,AC边为L2,BC边为L3。现在以A点为坐标原点构建三维直角坐标系,AB所在方向设为Y轴,过A点垂直于AB边为Y轴,过A点且垂直于XY平面向上的作为Z轴。假设各点、长度及角度标注如图1所示。3个传感器分别拉伸出LL1,LL2,LL3,于线的另一端汇聚于K点,K点的坐标(x,y,z)是所要求解的数值。

图2 3个基站的平面关系图
根据图2,由XY平面上的几何信息得到基准点坐标:A(0,0,0),B(0,L1,0),C(L2sinα,L2cosα,0)。根据图1,得到:
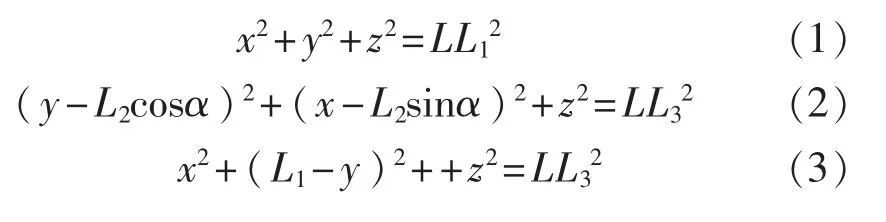
由式(1)~式(3)得到:

由式(1)、式(2)得到:

将式(4)带入式(5),得到:

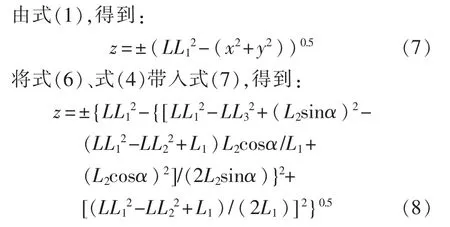
结合测量的情况,设定目标点在z>0的半空间运动,即z永远大于0。整理、简化后得到:
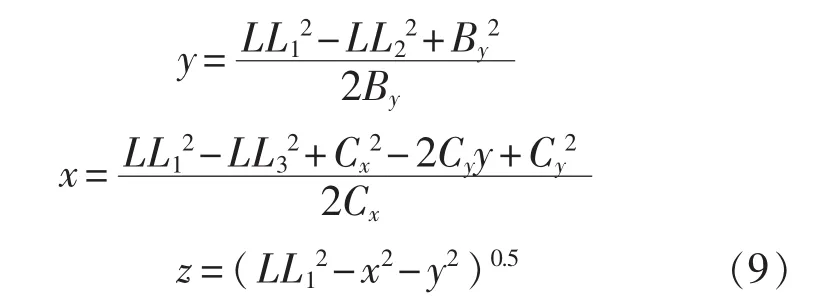
式中By=L1,Cx=L2sinα,Cy=L2cosα。
根据以上的推导和计算,通过设定坐标轴原点,并依靠3个站点的初始位置和拉线长度既可得到线段交汇点的空间位移的情况,即实现空间定位的目的,可确定半空间(z>0)内唯一的空间位置点。
2 三维空间位移测量系统的设计与实现
本文所述的三维空间位移测量系统,其硬件主要包括位移传感器、数据采集仪、PC机、电源等。系统采用上海好耐公司的HL10型拉线式位移计测量拉伸长度并转换成电压模拟量,经采集卡采集后由PC机中软件系统进行计算、处理和数据保存,采集卡选用NI-USB-6363。
软件部分基于美国NI公司的LabVIEW软件平台开发,可实现目标点三维坐标的实时测量与空间动态显示。其中通过输入3个站点之间两两连接的长度,得到站点的坐标信息。从简化和实用的角度,将第1个站点设置为默认为坐标原点(0,0,0)即A点;在期望的Y方向上设置另一个站B,B的坐标设为(0,L1,0),则L1为AB长度;C站点与A、B点同处于水平面,三点形成任意锐角三角形,与AB垂直的即为X轴,C点坐标为C(L2sinα,L2cosα,0),Z轴垂直A、B、C所在平面,相交于A点,指向目标点运动所在的半空间。图3为程序流程图。

图3 软件系统程序流程图
图4是本套测量系统主要软件功能的程序框图,其中图4(a)可以根据初始数值L1、L2、L3进行角度值a计算,然后赋予A、B、C站点的坐标值,利用“3CH”子程序实现3个拉线式位移计的拉线长度量的数据采集,得到LL1、LL2、LL3,最后利用文中推导式(9)得到空间点的坐标值K(x,y,z);图4(b)主要是根据3个站点坐标值和1个目标点坐标值结合三维坐标轴生成一个3D空间,直观的表示4点之间的相互关系,基于LabVIEW控件的优异性能,除了可以实时表现4点的空间关系,而且可以通过鼠标右击在屏幕中以任意角度观测空间四点,十分方便和直观[13]。图5是本系统的用户前面板界面,可以看出完成输入3个“初始值”和“文件保存位置”即可开始测量工作,界面中3D显示图与实体对象的相互关系完全一致。
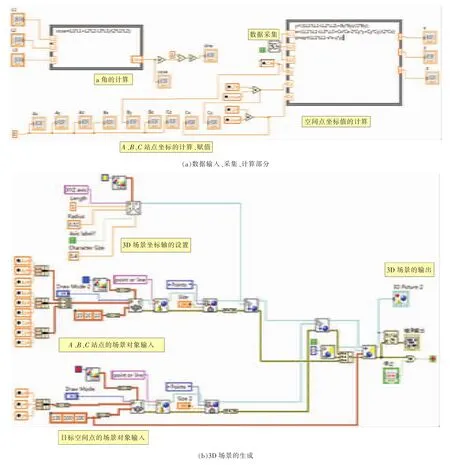
图4 测量系统的部分程序框图
3 实 验
3.1 某物体空间运动的测量
采用本套测试系统,对于一个在空间内快速螺旋上升的目标点进行了实际测量,根据测量数据得到了目标点的空间运动轨迹,如图6所示。通过实际操作可以看出,本测试系统操作简单,数据结果准确,测量过程中可在屏幕中随时改变视角,显示更加直观,如图7所示。
3.2 与普通位移计进行测试数据对比

图5 测量系统操作界面

图6 基于测量数据的目标点的空间轨迹(单位:mm)
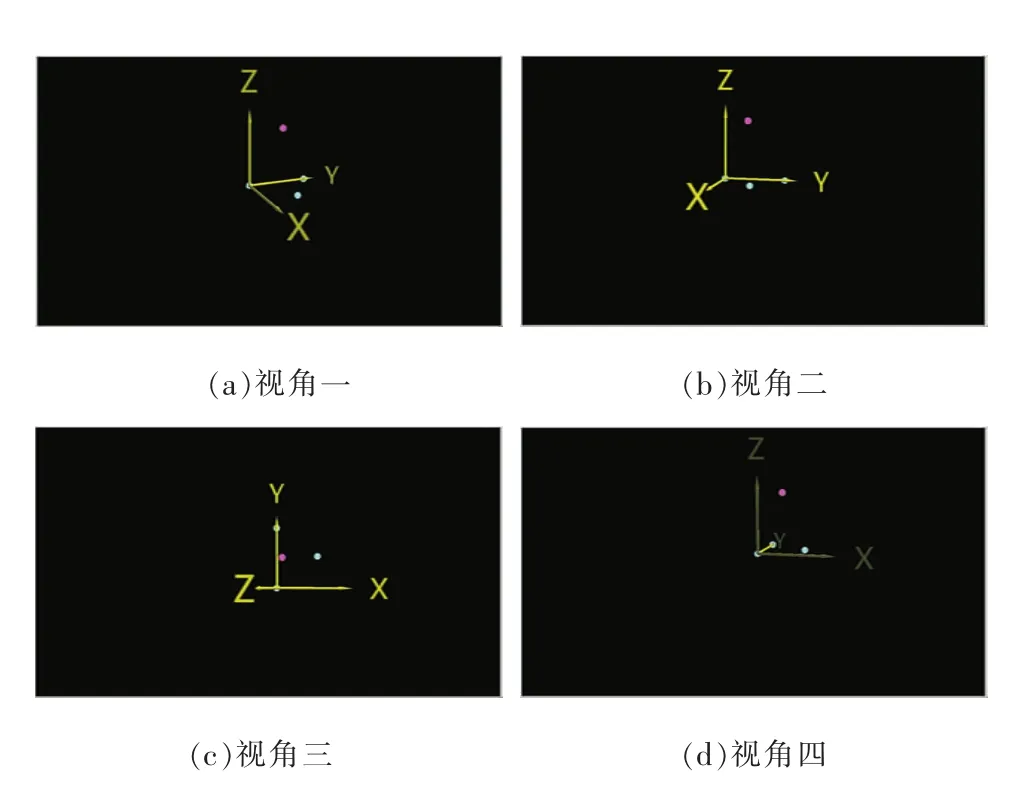
图7 可从不同视角观测空间内的目标点

图8 两种测试设备所获位移数据的对比
令目标物体仅产生X向位移,同时使用普通位移计和本设备对该物体进行位移测量,将得到的两条X向位移-时间曲线进行比较,如图8(a)所示。同理,得到Y向和Z向位移时间曲线对比图,如图8(b)和图8(c)。从图中可以看出本设备所取得的位移数据与同方向上普通位移计的数据基本一致,仅在位移突变时存在少量差别,该误差可以归咎于目标物体、普通位移计、本设备中3线交汇点在协同运动时的操作因素导致,如果单独使用本设备将没有这种影响,误差会进一步减少。
4 结束语
1)基于LabVIEW软件平台开发的三站式三维位移测量与空间动态显示系统,通过采用三站式基站架构,使用3个拉线式位移计的拉线伸长量就可以准确得到目标点的空间坐标值,并且以三维空间的形式动态显示目标点的运动。
2)相对于文献[10]中所介绍的四站点空间测量,本测量系统测点布置更加灵活、不易受到场地限制、操作方便、可显著降低科研工作人员的工作强度,经实际测试和分析,该系统数据可靠,测量精度满足要求,测点显示直观。
3)相对于传统的单向位移测量,考虑三维的位移测量对于理解结构物的变形和位移有着重要意义。
[1]陈晓荣,蔡萍,施文康,等.激光跟踪运动物体空间坐标测量系统研究[J].仪器仪表学报,2004,25(6):777-780.
[2]毕树生,梁杰,战强,等.机器人技术在航空工业中的应用[J].航空制造技术,2009(2):34-40.
[3]刘长毅.飞机自动化装配中的机器人制孔动力学研究[J].航空制造技术,2012(16):26-29.
[4]曹文祥,冯雪梅.工业机器人研究现状及发展趋势[J].机械制造,2011,49(2):41-43.
[5]刘振宇,陈英林.机器人标定技术研究[J].机器人,2002(5):447-450.
[6]STEPHAN S,MARKUS V,MINU A.On the calibration of6-D laser tracking system for dynamic robot measurements[J].IEEE Trans Instru Meas,1998,47(1):270-274.
[7]MAYER J,GRAHAM A,PARKE R.Aportable instrument for 3-D dynamic robot measurements using triangulation and laser tracking[J].IEEE Trans Robot Auto,1994,10(4):504-516.
[8]赵磊,杨杰.基于Solidworks Simulation的三坐标测量动态误差分析[J].机床与液压,2012,40(1):39-42.
[9]杨会臣,贾金生,王海波.高速摄影测量在振动台动力模型试验中的应用[J].水电能源科学,2012,30(1):153-155.
[10]粪成,陈文亮,张得礼.基于拉线位移传感器的动态空间位置测量方法[J].机械设计与制造工程,2014,43(3):57-61.
[11]马友梓,朱瑞良.拉线式相对位移传感器的研制[J].遥测技术,1982(3):30-36.
[12]王兴,戚景观.一种新的拉线式位移传感器的设计及其应用[J].机械工程与自动化,2012(4):171-173.
[13]陈树学,刘萱.LabVIEW宝典[M].北京:电子工业出版社,2011:121-126.
(编辑:刘杨)
Development of spatial position measurement system based on guyed displacement meter
ZHOU Nianqiang1,2,LIU Ao1
(1.College of Civil Engineering,Nanjing Forestry University,Nanjing 210037,China;2.College of Civil Engineering,Tongji University,Shanghai 200092,China)
A spatial displacement measurement system has been designed and developed for spatial displacements of target point.The measurement system took LabVIEW as software development platform and three guyed displacement meters and USB data acquisition card of USA Enai Company,which can proceed displacement measurement and data calculating based on theoretical basis of three-location space location algorithm.The measuring algorithm is feasible and reliable. The system can realize the space displacement measurement for target point according to three groups of changing line length data after confirming the location information (length between two locations),so as to obtain the 3D position.Besides,the space variations of the target were displayed in real time on software interface of system.The test results show that the system has many advantages such as simple structure,easy achievement,intuitive display and high accuracy,which make it a very useful tool.
spatial displacement measurement system;three-location space location;LabVIEW; guyed displacement meter
A
:1674-5124(2017)01-0084-05
10.11857/j.issn.1674-5124.2017.01.018
2016-08-10;
:2016-10-12
南京林业大学大学生创新项目(2014xj041)
周年强(1980-),男,安徽芜湖市人,实验师,博士研究生,研究方向为结构工程减震与隔震技术、结构试验与检测技术。
