基于白光LED的光谱共焦位移传感器
2017-02-22王津楠陈凤东刘炳国刘国栋
王津楠,陈凤东,刘炳国,甘 雨,刘国栋
(哈尔滨工业大学 光电信息测控技术与装备研究所,黑龙江 哈尔滨 150001)
基于白光LED的光谱共焦位移传感器
王津楠,陈凤东,刘炳国,甘 雨,刘国栋
(哈尔滨工业大学 光电信息测控技术与装备研究所,黑龙江 哈尔滨 150001)
为实现光谱共焦位移传感器的小型化、低功耗和高精度,在设计过程中选择体积小、耗电量小的白光LED作为传感器的光源,并使用光纤耦合器代替复杂的分光棱镜式光学系统结构。色散镜头采用消色差透镜与非球面透镜组合的方式,在使用较少透镜数量的情况下达到较好的像差校正能力。同时结合光强归一化等数据处理方法,消除白光LED光源光谱光强分布不均匀等因素对测量精度造成的影响,得到准确、稳定的峰值波长与位置间的对应关系。通过双频激光干涉仪对系统进行标定和测量,实验结果表明使用435~655nm波段,系统测量范围可以达1.7mm,平均测量精度1.8μm,满足一定的测量需求。
位移传感器;光谱共焦;色散镜头;光纤耦合器
0 引 言
随着精密制造业的发展,对精密测量技术要求越来越高。位移检测技术作为几何量精密测量的基础,不仅需要具有高精度,而且要求能适应不同的环境和材料,并且逐步趋于实时、无损检测[1],所以传统的接触式测量方法已经不能满足要求,高精度的光电位移检测技术成为当前研究的热点。
光谱共焦位移传感器最早由法国STIL公司发明,与目前常用的激光三角法相比,光谱共焦位移传感器具有更高的分辨力,并且光源发射和接收同光路,不会出现激光三角法光路容易被遮挡或被测目标表面过于光滑而接收不到目标反射光的情况,对被测目标适应性强[2]。目前商业化的光谱共焦位移传感器生产商主要有法国STIL、德国Micro-Epsilon和Precitec公司,测量精度可以达到亚微米级别,国内相关研究较少。
1 光谱共焦位移传感器原理
光谱共焦位移传感器是一种通过光学色散原理建立距离与波长间的对应关系,利用光谱仪解码光谱信息,从而获得位置信息的装置。如图1所示,白光LED光源发出的光通过光纤耦合器后可以近似看做点光源,经过准直和色散物镜聚焦后发生光谱色散,在光轴上形成连续的单色光焦点,且每一个单色光焦点到被测物体的距离都不同。当被测物处于测量范围内某一位置时,只有某一波长的光聚焦在被测面上,该波长的光由于满足共焦条件,可以从被测物表面反射回光纤耦合器并进入光谱仪,而其他波长的光在被测物面表面处于离焦状态,反射回的光在光源处的分布远大于光纤纤芯直径,所以大部分光线无法进入光谱仪。通过光谱仪解码得到光强最大处的波长值,从而测得目标对应的距离值[3]。由于采用了共焦技术,因此该方法具有良好的层析特性,提高了分辨力,并且对被测物特性和杂散光不敏感[4]。

图1 色散共焦位移传感器原理
2 系统结构设计
在光谱共焦位移传感器系统中,系统的测量范围受4个方面的因素影响:1)光源光谱分布范围;2)色散镜头在工作波段范围内的轴向色差;3)光谱仪的工作波段[5];4)光纤耦合器的工作波段。选择的白光LED光源的光谱分布如图2所示,波段400~800nm,所以在设计过程中,色散镜头、光谱仪和光纤耦合器的工作波段要尽量与光源的波段一致,最终系统的测量范围为色散物镜在其共同工作波段范围内的轴向色差。
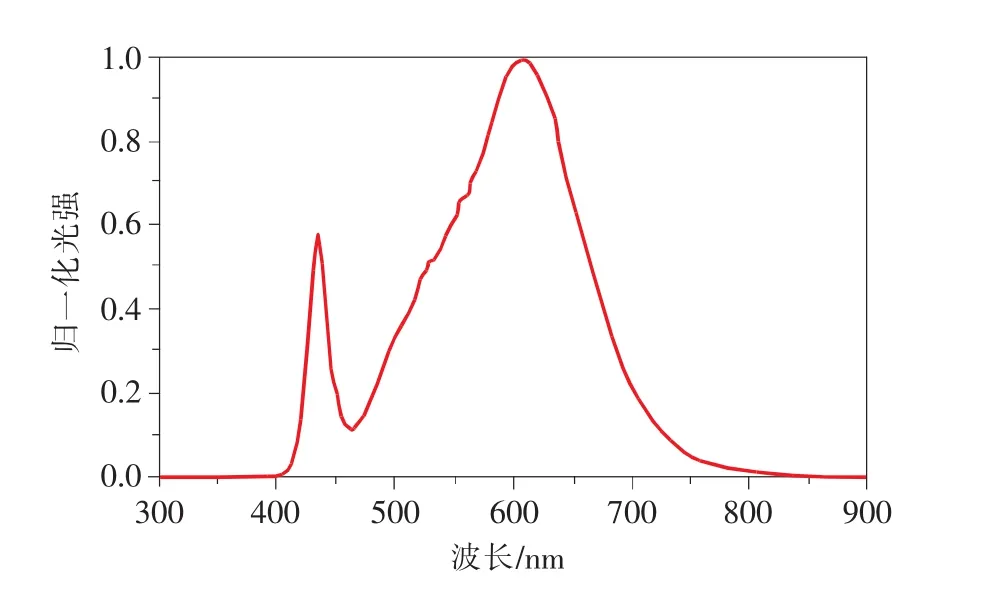
图2 白光LED光源光谱分布
在设计色散镜头时,除了要考虑其轴向色差外,还要考虑如下因素:1)增大物方数值孔径可以提高分辨率;2)增大像方数值孔可以提高光源利用率;3)减小系统球差可以提高精度;4)系统结构要易于装配和调整[6]。
以上这些因素是相互制约的,增大数值孔径的同时系统球差也随之变大,如果要校正球差系统,结构就会变得复杂,所以色散镜头设计的目的是用最少的透镜达到最理想的效果。光谱共焦位移传感器的光学系统可以看成两个部分,一部分是消色差场镜,它的焦点在光源处,把点光源准直成平行光,另一部分为色散物镜,它的作用是把不同波长的平行光聚焦在轴上的不同位置,形成光谱色散[7],而消色差透镜和非球面透镜正好可以起到这样的作用。本文采用了美国 thorlabs公司的消色差和非球面透镜组合,色散镜头设计如图3所示。并选择在光源波段范围内耦合效率较高的光纤耦合器和分辨率为0.5nm的光谱仪,具体元件及参数如表1所示。

图3 色散物镜结构
通过ZEMAX软件仿真分析,在400~700 nm波段色散镜头的色散范围为2.3 mm,具体波长与聚焦位置的对应关系如图4所示。由于系统要分析反射回光纤的光谱光强分布情况,所以对共焦过程进行了模拟,在仿真过程中,将平面镜置于焦面处,使通过光学系统的光经过平面镜反射后又回到光学系统,并成像在光源位置[8]。通过观察像面处的点列图发现,当平面镜设置在不同波长的焦面处时,聚焦波长在像面处的弥散斑较小,而其他波长的弥散斑较大。图5为平面镜设置在550 nm波长焦面处时像面上的点列图,其中550 nm波长的弥散斑直径为41.4μm,小于光纤纤芯直径,而400nm波长的弥散斑直径为2311.46μm,远大于光纤纤芯直径。

表1 关键器件选型

图4 波长与聚焦位置关系

图5 550nm波长聚焦时像面上不同波长的点列图(单位:μm)

图6 被测物在不同位置时的光谱光强分布
为了更准确地分析光纤纤芯直径对共焦系统的滤光情况,将光纤端面离散为间距1nm的均匀分布点光源,并假设弥散斑与光纤纤芯重叠的部分为可以进入光纤的光。图6为在此条件下计算的平面镜设置在450,500,550,600,650nm焦面处时,反射回光纤的光谱光强分布。从图中可以看出光纤纤芯直径起到了较好的滤光作用,而且随着波长的变大半高宽变大。
分析了不同光纤纤芯直径情况下反射回光纤的光谱光强分布情况,图7为对反射镜设置在550nm焦面处分析的结果,可以看出当光纤纤芯直径较小时,光谱信号能量较弱,随着光纤纤芯直径的增大,光谱信号能量变强但半高宽也变大,分辨率下降。设计中必须选取合适的光纤,同时满足系统的分辨率和信噪比要求。

图7 不同纤芯直径下的光谱光强分布
3 数据处理
光谱信息处理的最终目的是为了得到峰值波长,但是光纤耦合器的内部回光、光源光强分布的不均匀、CCD对不同波长光响应程度的不同、系统的噪声等因素都会对谱峰定位造成影响,需要进行预处理后再用适当的算法提取峰值波长。
在光谱仪中得到的光谱信息包括光纤内部返回的背景光和从被测物表面返回的信号光。为了得到有用的信号光,首先需要对背景光进行采集,然后从光谱仪得到的数据中减去背景光。此外还要考虑光源光谱光强分布不均匀的影响。图8为在图6的基础上加入光源光谱特性后的光谱光强分布图,从图中可以看出峰值波长发生了偏移,所以需要对光源光强进行归一化处理。另外由于传感器在各个环节都会产生随机噪声,所以需要进行光谱去噪,常用的光谱去噪方法有中值滤波、小波函数滤波等[9],比较了不同的滤波方法后,最终选择了用db6小波进行6次分解强制消噪,因为经过其滤波处理后谱峰定位的重复性较好。

图8 加入光源光谱特性后的光谱光强分布
由于光谱仪中CCD像元有一定尺寸,相当于对原始的光谱进行了离散采样,所以可能会出现漏峰的情况。如果使用原始光谱数据中的最大值作为峰值波长会影响定位的精度,因此需要选用合适的算法对谱峰位置进行确定。质心法是常用的峰值定位算法[10],适用于处理关于峰值位置对称的光点信号,质心法公式为

式中:x——质心位置;
t——CCD上的第t个像元;
It——第t个像元上的灰度值。
4 实验及结果分析
通过以上分析及设计,搭建出光谱共焦位移测量系统如图9所示,以平面镜作为被测物,采用双频激光干涉仪对系统进行标定和测量。
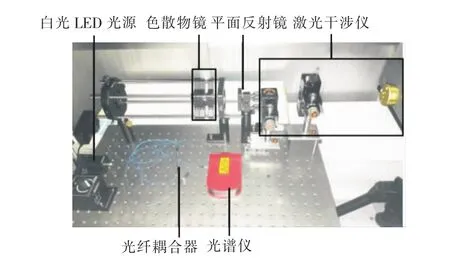
图9 系统装置图

图10 标定曲线
实验过程首先采用双频激光干涉仪对系统进行标定,选定反射镜的初始位置后,沿着轴向方向每次给反射镜100μm的移动量,对每个被测点进行5次信息采集。经过数据处理后,取每个测量点5次平均后的峰值波长与对应的激光干涉仪位置做曲线拟合[11],从而获得峰值波长和位置间的对应关系。图10为经过3次多项式拟合后的结果,在435~655nm波段对应的位移为1.7mm,具体表达式为

图11为其中反射镜位于5个不同位置时经过数据处理后的光谱光强曲线。
图12表示系统的重复性,在18个位置的5次测量中,最大的波长偏差为 0.86 nm,平均波长偏差0.36nm,对应的平均位移偏差3.2μm。
更换被测件后进行测量,选择测量范围内的一个位置,对其进行5次采集,将数据处理后得到的峰值波长取平均值作为系统的起始位置。然后在全量程范围内随机选择24个被测点进行测量,计算起始位置的平均峰值波长为440.51nm,最大位移处的峰值波长为642.46nm。图13中横坐标表示激光干涉仪的位移,纵坐标为计算出的位移与激光干涉仪位移的差,其中最大测量误差为5.8μm,平均误差为1.8μm。

图11 数据处理后被测物在不同位置时的光谱光强分布

图12 系统重复性
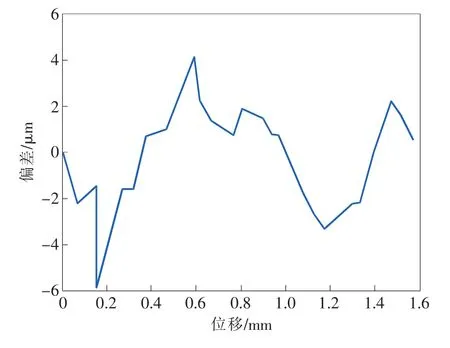
图13 系统测量误差
5 结束语
介绍了光谱共焦位移传感器的工作原理、特点和研究现状。设计了基于白光LED和光纤耦合器式的小型化、低功耗光谱共焦位移传感器。采用ZEMAX仿真软件对设计的色散镜头结构进行了分析,并根据弥散斑的大小对共焦曲线做了理论计算。同时分析了光源特性等因素对谱峰定位造成的影响,通过合适的数据处理方法得到位置和峰值波长间的对应关系。完成了设计系统的搭建,实验结果表明系统在435~655 nm波段,测量范围1.7 mm,平均测量精度1.8μm。这对日后研究工作的进一步深入以及样机性能的提高都是十分有利的。
[1]吕亚玲,杨晓红.现代先进制造技术的趋势——精密与超精密[J].机械制造,2004,42(10):25-26.
[2]胡庆英,尤政.激光三角法及其在几何量测量中的应用[J].宇航计测技术,1996,16(2):10-14.
[3]柳晓飞,邓文怡,牛春晖,等.一种新型光谱共焦位移测量系统研究[J].传感器与微系统,2013,32(4):34-36.
[4]高兴宇,伍世荣,萧泽新.一种现代先进成像技术:共焦显微术[C]∥全国光学与光电子学学术研讨会,2005:244-249.
[5]武芃樾.光谱共焦位移传感器设计技术研究[D].北京:中科院物理研究所,2012.
[6]牛春晖,李晓英,郎晓萍.光谱共焦透镜组设计及性能优化[J].北京信息科技大学学报,2013,28(2):42-45.
[7]LEACH R.Optical measurement of surface topography[M]. Berlin:Springer,2011:71-106.
[8]张宁.基于复色共焦法的透明材料厚度检测系统研究[D].长春:长春理工大学,2012.
[9]陈刚.混合集成微型光纤光谱仪的研究[D].重庆:重庆大学,2002.
[10]李静,李为民.重心法在光电信号处理中的应用[J].光学技术,1999(2):57-59.
[11]陈平.线阵CCD光谱仪数据采集和处理方法研究[D].天津:天津理工大学,2012.
(编辑:刘杨)
White LED-based spectrum confocal displacement sensor
WANG Jinnan,CHEN Fengdong,LIU Bingguo,GAN Yu,LIU Guodong
(Institute of Optics Instrument and Automation,Harbin Institute of Technology,Harbin 150001,China)
In order to realize miniaturization,low power consumption and high precision of spectrum displacement sensor,small-size,low power consumption white LED as the light source of the sensor is introduced as per design and optical fiber coupler is employed instead of complicated beam splitter prism optical system structure.The dispersive lens is a combination of spectrum lens and aspherical lens so that a better aberration correction capability is achieved with less quantity of lenses.In addition,by taking advantage of integrating the light intensity normalization data processing method,the impact on measurement accuracy from uneven distribution of white LED light source spectral intensity is eliminated,obtaining an accurate and stable correspondence between peak wavelength and location.With the aid of dual frequency laser interferometer for system calibration and measurement,the results show that the system measuring range can be up to 1.7 mm with average measurement accuracy of 1.8 μm at waveband 435-655 nm,meeting the designated measurement requirements.
displacement sensor;spectrum confocal;dispersive lens;optical fiber coupler
A
:1674-5124(2017)01-0069-05
10.11857/j.issn.1674-5124.2017.01.015
2016-08-22;
:2016-10-09
王津楠(1992-),女,辽宁抚顺市人,硕士研究生,专业方向为精密光电仪器。
