气动盾形闸门协同控制系统纠偏研究
2017-02-21赵鹏飞李义茂李泽敏
赵鹏飞,李义茂,李泽敏
(1.江河机电装备工程有限公司,北京 100070;2.湖南江河机电自动化设备股份有限公司,湖南 长沙 410013)
气动盾形闸门协同控制系统纠偏研究
赵鹏飞1,李义茂1,李泽敏2
(1.江河机电装备工程有限公司,北京 100070;2.湖南江河机电自动化设备股份有限公司,湖南 长沙 410013)
随着气动盾形闸门在海绵城市建设、水环境治理工程中的广泛应用,闸门开度同步纠偏控制愈来愈重要。通过对系统协同机理研究和实践,气动盾形闸门偏差的结果状态得到了有效的控制。本文针对气动盾形闸门系统全运动过程中的偏差问题,结合多项工程实际做了研究,使闸门在整个运动过程中都保持良好的一致性和平稳性,并将此研究结论运用在河南洛阳东湖270 m(长)×6 m(高)气动盾形闸门系统上,取得了良好的应用效果。
协同控制系统;纠偏;过程状态;结果状态
1 引言
协同控制(Synergetic control)就是自组织过程,主要是指在一定边界条件下由系统中所出现的某个(或某些)序参量运用正反馈作用对系统中各子系统产生支配和控制作用,从而使系统趋于协同的过程[1]。
气动盾形闸门协同控制纠偏反映在整个闸门运动过程中,即过程状态和结果状态中,协同系统纠偏是实时的,考虑到外界因素、主增益及偏差增益在整个系统的联系,为保证整个系统在两种状态下良好的反映,协同系统将作用于每路闸门的部分单独作为子系统处理,协同系统将采集到的各路闸门位置信息,经过计算、处理,反馈给每个子系统。同时,闸门从起始位置到目标位置拆分为两部分:
(1)闸门平均位置到达要求位置的信息;
(2)单个闸门偏移平均位置的信息。
反馈给每个子系统的数据信息分别作为子系统调整PID的入口参数,根据闸门偏移平均位置信息调节增益和激活或冻结PID,使整个系统反馈到闸门的各个位置上,都有良好的状态。
2 气动盾形闸门控制系统纠偏设计
2.1 闸门协同过程中位置的分解处理
每路闸门从当前位置到目标位置可以分解为所有闸门的平均位置到达目标位置与当前闸门到闸门平均位置之和,如图1所示。
……;
闸门从平均位置到达要求位置通过PID(Hsp,Haverage,kp,kd,ki)计算完成,但在整个调节过程中,为了达到在目标位置周围不引起过大的震荡,只引入了比例、微分调节,ki置零处理;
其中:Hsp——设定高度;
Haverage——平均高度;
Hbias——偏差高度;

第n闸门偏离平均位置通过PID(Haverage,Hbiasn,kp,kd,ki)计算,同样只引入比例、微分调节。

正常调节过程中,每个闸门系统的增益输出为:
PID(totaln)=PID(Haverage,Hbiasn,kp,kd,ki)+PID(Haverage,Hbiasn,kp,kd,ki)
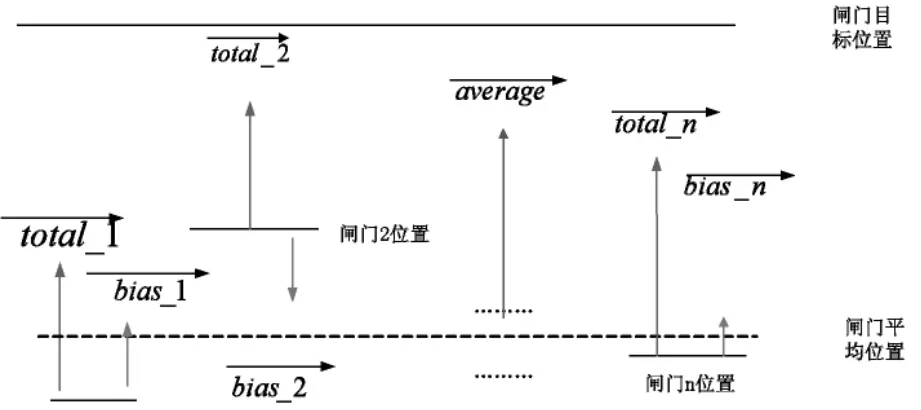
图1 闸门动作方向分解合成图
在调节过程中,通常bias纠偏增益系数会大于aevrage闸门主进方向增益。
2.2 协同系统纠偏
在调节过程中,在某个当前起始位置,如当前位置有偏差,那么时间增益如图2所示:

图2 主进与纠偏增益图
当闸门间的偏差较大时,必然会引起|blas_■→n|增大PID(Hbias_n)。此时,当PID(Hbias)>k(常数)时,将PID(Haverage)冻结,即短暂的停掉主进,使系统完全处理纠偏;当调节接近平均位置时,PID(Hbias)会减小,当PID(Hbias)等于或小于k常数时,主进PID(Haverage)被激活,此时系统默认为整个过程中一个新的起始状态。
如此,反复持续上述计算及动作,直至达到需要PID(Hbias)目标的状态,如图3所示。

图3 主进与增益再次激活增益图
2.3 协同系统子系统处理
协同系统为了闸门间的起升独立性、抗干扰能力强、及避免模块的重复与累赘,将作用于每扇闸门的部分,单独作为子系统处理。
协同系统的外界变量通过总系统采样后,计算出来的闸门平均位置Haverage与闸门偏移平均位置的偏差Hbias分别反馈到相应的子系统n,子系统在每个调节周期内单独作用于相应的闸门,以保证同组闸门开度偏差在设定范围内,即同步(图4)。

图4 信息交互图
3 结论
气动盾形闸门协同控制系统在闸门运行过程中进行实时纠偏处理,提高了每个闸门运动过程的同步性和平稳性。在洛阳东湖项目上的实际应用,充分验证了每个闸门之间运动的同步性和平稳性。随着气动盾形闸门国产化的广泛应用,优化设计后的智能协同控制系统在故障诊断、报警、历史数据查询等方面做了改进,该系统将为类似工程的安全运行提供可靠的技术保障,并为推动气动盾形闸门系统在我国的运用打下坚实的基础。
[1]龙 妍.基于物质流、能量流与信息流协同的大系统研究[D].武汉:华中科技大学,2009.
[2]罗 杰.基于模糊控制智能灌溉控制系统研究[D].长春:吉林大学,2011:103-105.
[3]张 兴.PWM整流器及其控制策略的研究[D].合肥:合肥工业大学,2003:29-32.
[4]杨 锋,冯磊华.气动盾形闸门的自适应模糊PID控制策略研究[J].液压与气动,2014(9):71-74.
[5]刘 镇,姜学智,李东海.PID控制器参数整定方法综述[J].电力系统自动化,1997,(8):79-82
[6]胡寿松.自动控制原理[M].北京:科学出版社,2008:15-20.
TV663
A
1672-5387(2017)01-0025-02
10.13599/j.cnki.11-5130.2017.01.007
2016-12-06
赵鹏飞(1964-),男,高级工程师,从事水电站生产管理工作。