基于信息熵估计的生物雷达弱周期信号识别技术研究
2017-02-21薛慧君张杨吕昊焦腾于霄王健琪
薛慧君,张杨,吕昊,焦腾,于霄,王健琪
第四军医大学 生物医学工程学院,陕西 西安 710032
基于信息熵估计的生物雷达弱周期信号识别技术研究
薛慧君,张杨,吕昊,焦腾,于霄,王健琪
第四军医大学 生物医学工程学院,陕西 西安 710032
超宽带雷达近程探测人体目标多应用于特殊场合。使用单通道超宽带生物雷达穿墙探测多个静态人体目标,由于电磁波传输过程中能量衰减,目标之间和雷达天线相互位置的影响,距离雷达天线较近的人体目标能够被准确识别,而距离雷达天线较远的人体目标很难被准确识别。本文提出信息熵识别算法,通过计算不同距离点信号的频率复杂度,来确定被探测人体目标距离。实测数据结果显示本文所提出的方法有效提高多目标识别的准确率,进而提高了生物雷达的探测效率。
超宽带生物雷达;多目标;信息熵;信号识别;生命探测
引言
超宽带(Ultra Wide-Band,UWB)生物雷达具有很好的距离分辨率和穿透能力,可以穿透一定厚度非金属介质(如砖墙、废墟等)检测生命体的生命体征、运动轨迹和运动方式等,因此超宽带技术被越来越多的应用于民用、军用、国家安全等领域[1-3]。使用UWB生物雷达近程探测多个人体目标,识别呼吸信号,判断目标位置,在地震、火灾等灾害救援中有着非常重要的意义[4-5]。生物雷达探测过程中,传输路径的增加、障碍物的吸收、人体自身的电磁特性以及目标和雷达天线间相互位置,都会造成电磁波能量不同程度的衰减[6-7],甚至探测不到生命信号,这对UWB生物雷达近距离探测多个人体目标的应用造成了不可忽视的影响[8-11]。
针对提高多目标的探测精度的问题,国内外的研究团队开展了大量的实验研究。Ahmad等人在墙体参数未知的情况下,研究了基于步进频率UWB雷达的穿墙探测技术。该团队使用多个带宽为1 GHz,步进频率为5 MHz的雷达在不同方位对墙后人体目标进行探测,验证了该系统探测多个目标的能力[12-13]。Nag等人使用基于超宽带雷达阵列天线,探测障碍物后多个运动目标的距离和方位分布,在测试过程中提到了目标定位的问题[14]。本课题组基于生物雷达探测过程中目标间的干扰问题,在雷达硬件系统的搭建与信号处理方面也进行了相关研究[15-16],虽取得了阶段性的进展,但在实验中发现,使用生物雷达探测多个人体目标时,距离雷达天线较近的人体目标能够准确识别,而距离雷达天线较远的人体目标的探测效果并不可靠。针对这个问题,本文使用400 MHz低频UWB生物雷达穿墙探测两个静态人体目标。由于雷达系统自身和周围环境中干扰,雷达回波中会携带大量的噪声信号,使得人体目标的呼吸信号被淹没在噪声中。如何抑制噪声,识别有用信号,尤其是远端人体目标的呼吸信号是研究的关键所在。
本文根据信息熵[17-19]在通信领域中可用于表征非平稳信号复杂度在时域上的动态变化信息。信号的组成成分越多,熵值越大;信号越规律,熵值越小;通过计算不同距离点信号的信息熵值,来识别人体目标与雷达天线的径向距离,为UWB生物雷达探测多个人体目标打下良好的基础。
1 UWB雷达硬件系统
实验系统包含3部分(见图1):计算机、雷达主机和雷达天线。操作人员通过计算机设置雷达探测参数、对接收的回波信号进行数据处理;雷达主机由6个模块电路组成,脉冲发生器产生采样频率为128 KHz窄带周期信号,窄带信号一部分被送到整流电路通过碟形天线产生极性脉冲,另一部分窄带信号通过延时单元产生距离门信号,触发接收器选择性的接收回波信号,回波信号经过距离门,放大、整流送入计算机等待处理。右侧的双极性碟形天线,分别用来发射和接收中心频率为400 MHz的电磁波。
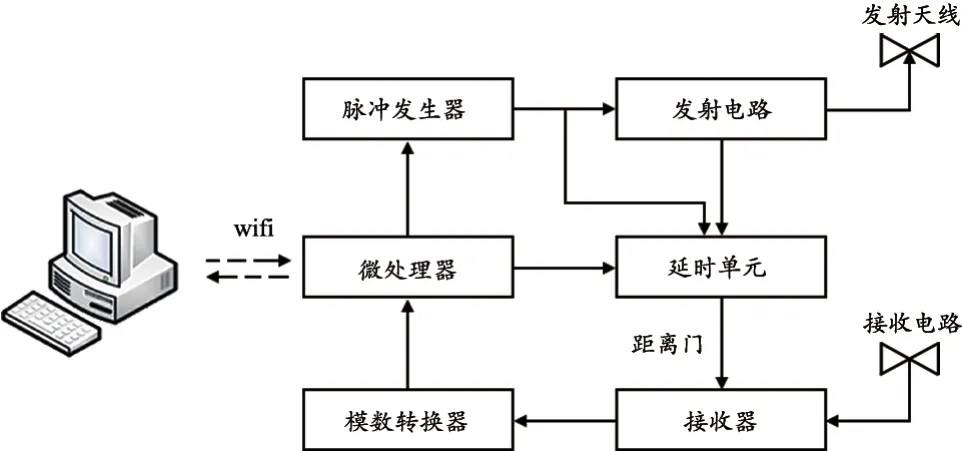
图1 实验系统原理框图
2 雷达回波信号处理算法分析
雷达回波信号以脉冲波的形式存储起来,每个脉冲包含2048个采样点,见图2。沿着脉冲波(纵坐标轴)的方向为“快时间”,表示每一个脉冲自发射到接收的时间间隔,含有距离信息;横坐标方向的时间轴定义为“慢时间”,表示某个固定点信号随着时间变化的波动情况。雷达回波信号在“慢时间”上的采样间隔t = nTs(n=1, 2, …, N),“快时间”(距离)上的采样间隔τ = mTf(m=1, 2, …, M)。这样每个距离上的点信号组成一个N×M的二维矩阵。在探测过程中,由于系统自身携带噪声和周围环境的干扰,造成雷达回波的有用信号被淹没在背景杂波中。为了有效去除背景噪声,检测人体的呼吸信号,本文使用低通滤波、去直流、FIR滤波等预处理算法,去除信号中的随机噪声、直流信号以及“慢时间”维度上的高频信息。得出一个N×M的新矩阵(见图2),其中N=200,N=3925,分别表示9 m时窗的距离采样点数为200,每一个距离点上对应的时间采样点数为3925,采样频率为64 Hz,对应采样时长约为61.3 s。
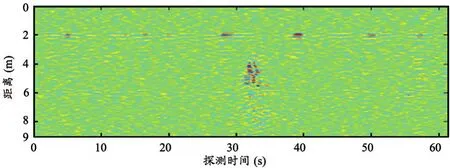
图2 预处理之后的雷达回波二维信号
雷达回波人体呼吸信号具有随时间缓慢漂移的特点,很难确定人体呼吸的信号频率,在一定程度上影响雷达探测的准确性。这就需要一种能够根据干扰特点自动调节参数的方法来抑制干扰。通过相关性分析可知目标位置与其后面一定区域内的信息存在相关性,在滤波过程中,可以将目标位置信号看成是干扰信号的参考信号,本文假设干扰信号具有加性,采用自适应相关抵消器来进一步抑制干扰。原理框图,见图3。
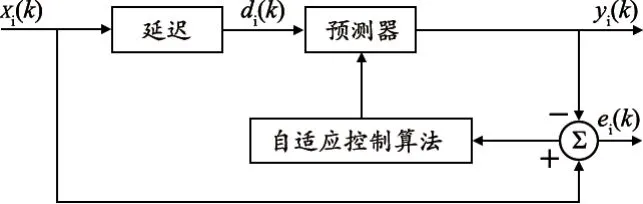
图3 自适应相关抵消器原理框图
其中xi(k)(i=1, 2, …, N,k=1, 2, …, M)为预处理后的雷达回波信号,di(k)为延迟时间Δ后的输入信号,yi(k)为系统输出,ei(k)为误差信号,具体迭代公式如下所示:

自适应控制算法步骤中得出的加权系数wi(k+1)再与延时后的输入信号进行自相关,经过多次迭代,得出有用信号的最佳估计,从而将窄带呼吸信号与宽带噪声信号有效的分离开来。
生物雷达穿墙探测人体目标过程中,电磁波的传播路径上往往存在衰减介质和强反射界面,导致距离雷达天线较远的人体目标的微动信号只有很少一部分被接收天线所接收。这就给远端目标信号的检测和提取带来很大难度。为了分析自适应滤波后的回波矩阵中每一个距离点上的频率分布关系,本文对不同距离点的时间信号分别做快速傅里叶变换(Fast Fourier Transform,FFT),得到每个距离点上时间信号的频谱,再采用信息熵谱图识别方法,以e为底求对数,单位为奈特(Nat),计算不同距离点信号频谱信号的信息熵值,公式如下所示:

其中i =1, 2, …, N(N=200),P( fk)代表不同频率信号的
概率密度,计算公式如下:

3 实验数据采集
使用UWB雷达进行穿墙探测实验,雷达天线和被探测人体目标之间有一堵24 cm厚度的实体墙体,雷达天线紧贴墙体,被探测目标分别位于墙后距离雷达天线2 m和7 m的位置,其中前面人体目标正对天线,后面人体目标位于天线右侧,两个人体目标方位角度约20°。实验过程中,被探测目标保持静止站立姿势,正常平稳呼吸,周围环境无明显动态干扰,见图4。

图4 穿墙探测示意图
4 实验结果与分析
UWB雷达穿墙探测2个静态人体目标,在电磁波传输过程中,随着距离的增加,人体和衣服对电磁波的吸收,能量有一定程度的衰减。再加上距离雷达天线较远的人体目标的部分信号,被前面目标遮挡,只有很少一部分呼吸信号被雷达天线所接收,造成前面目标的呼吸信号幅度大于后面目标,见图5。通过计算每个距离点上信号的方差,得出不同距离的能量谱,见图6a。从能量谱图可观察到2 m处的能量幅值明显高于其他位置,可确定该位置有人体目标存在。由于后面人体目标回波信号幅值较小,掺杂在杂波信号中,无法通过能量幅值准确识别。采用信息熵计算不同距离点信号的频率复杂度,结果见图6b。依据信息熵的定义可知,熵值小的区域信号成分简单,有目标的可能性较大,而熵值大的地方信号无规律,有目标可能性较小,这一结果与探测区域中有两个目标的实际情况相符。从图6b中可以看出后面人体目标所在区域的信号特征比图6a明显,这也说明信息熵对于微弱周期信号的识别效果好于能量谱识别方法。根据图6b两个峰值的位置来估计两人体目标的雷达天线径向距离:前面人体目标的位置为2 m,后面人体目标的位置为7 m。
5 结论
使用UWB生物雷达穿墙探测多个静态人体目标,回波信号中会携带大量噪声信号,考虑到有用信号与噪声共存问题,采用自适应滤波算法去除干扰信号,增强人体呼吸信号的周期性。对于距离雷达天线较远的人体目标信号微弱问题,采用信息熵识别算法,通过计算不同距离点上回波信号的频率复杂度,通过信息熵谱图对多个人体目标呼吸信号进行识别,结果显示,信息熵谱图可有效识别微弱周期信号,提高了UWB生物雷达对多个人体目标的识别效率。
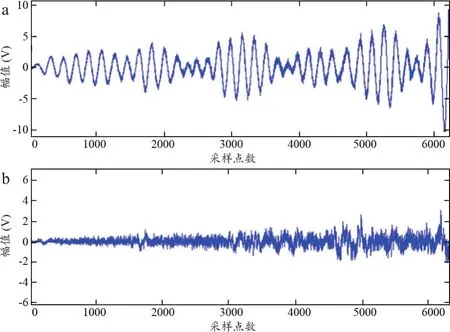
图5 自适应滤波后两个人体目标的呼吸信号
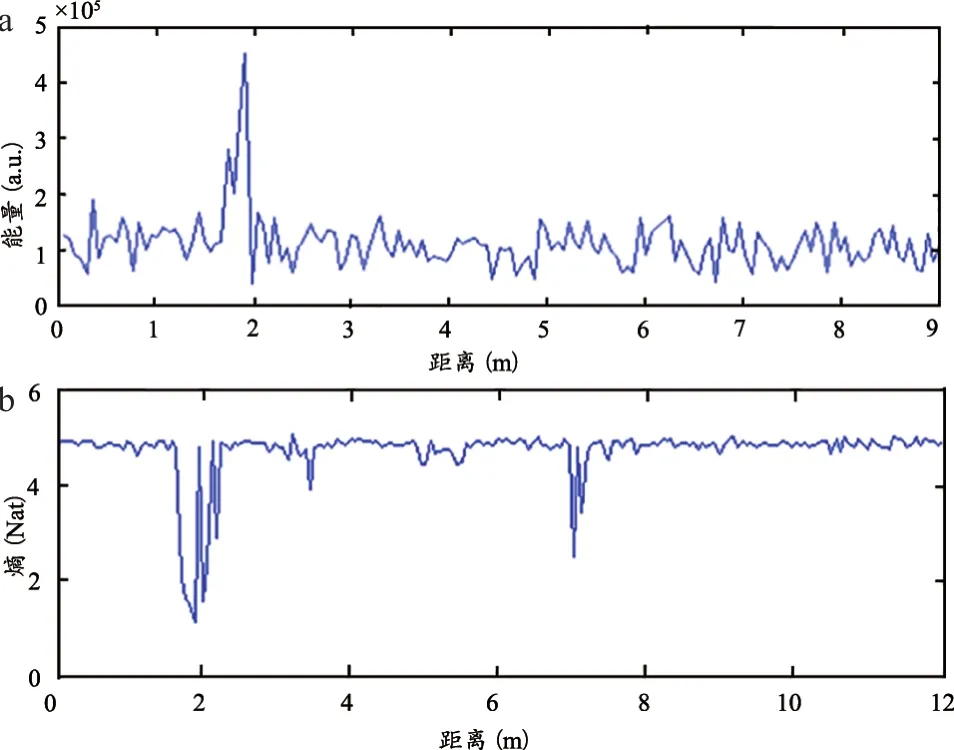
图6 回波数据处理结果
[1] DebesC,Amin MG,Zoubir AM.Target Detection in Single- and Multiple-View Through-the-Wall Radar Imaging[J].IEEE Trans Geosci Remote Sensing,2009,47(5):1349-1361.
[2] Li J,Zeng Z,Sun J,et al.Through-Wall Detection of Human Being’s Movement by UWB Radar[J].IEEE Geosci Remote Sensing Lett, 2012,9(6):1079-1083.
[3] Urdzík D,Kocur D,Rovňáková J.Detection of multiple targets with enhancement of weak UWB radar signals for the purposes of through wall surveillance[J].IEEE,2012:137-142.
[4] Lv H,Liu M,Jiao T,et al.Multi-target human sensing via UWB bio-radar based on multiple antennas[J].TENCON 2013 2013 IEEE Region 10 Conf,2013,(31194):1-4.
[5] Borek SE,Costianes PJ.Through-the-wall surveillance forhomeland security and law enforcement[J].Proc SPIE,2005: 175-185.
[6] Zhang Z,Zhang X,Lv H,et al.Human-Target Detection and Surrounding Structure Estimation Under a Simulated Rubble via UWB Radar[J].IEEE Geosci Remote Sensing Lett,2013, 10(2):328-331.
[7] Li Z,Li W,Wang J,et al.A Novel Method for Respiration-Like Clutter Cancellation Life Detection by Dual-Frequecy IR-UWB Radar[J].IEEE Trans Microwave Theory Tech,2013,6:2086-2091.
[8] Lv H,Jiao T,Wang J,et al.An Adaptive-MSSA-Based Algorithm for Detection of Trapped Victims Using UWB Radar[J].IEEE Geosci Remote Sensing Lett,2015,12(9):1808-1812.
[9] Kocur D,Rovňáková J,Urdzík D.Mutual shadowing effect of people tracked by the short-range UWB radar[A].International Conference on Telecommunications and Signal Processing[C]. 2011:302-306.
[10] Xu Y,Dai S,Wu S,et al.Novel detection method and parameters analysis of vital signal for Ultra-Wideband radar[J].IEEE Geosci Remote Sens Symp,2011:1822-1825.
[11] Xu Y,Shao J,Chen J,et al.Automatic Detection of Multiple Trapped Victims by Ultra-Wideband Radar[J].IEEE Geosci Remote Sensing Lett,2013,10(6):1498-1502.
[12] Ahmad F,Amin MG.A noncoherent approach to radar localization through unknown walls[A].2006 IEEE Conference on Radar[C].New Jersy:IEEE Xplore,2006:583-589.
[13] Ahmad F,Amin MG.Noncoherent approach to through-the-wall radar localization[J].IEEE Trans Aerosp Electron Syst,2006, 42(4):1405-1419.
[14] Nag S,Barnes MA,Payment T,et al.Ultrawideband through-wall radar for detecting the motion of people in real time[J].Proc SPIE,2002,4744:48-57.
[15] Zhang Y,Jiao T,Lv H,et al.An Interference Suppression Technique for Life Detection Using 5.75-and 35-GHz Dual-Frequency Continuous-Wave Radar[J].IEEE Geosci Remote Sensing Lett,2015,12(3):482-486.
[16] Li Y,Jing X,Lv H,et al.Analysis of Characteristics of Two Close Stationary Human Targets Detected by Impulse Radio UWB Radar[J].Prog Electromagn Res,2012,126(17):429-447.
[17] Rényi A.On measures of entropy and information[J].Proc Fourth Berkeley Symp Math Statist Prob Univ Calif,2015,1(5073): 547-561.
[18] Ronald R.Coifman and Mladen Victor Wickerhauser.Entropy-Based Algorithms for Best Basis Selection[J].IEEE Trans Inform Theory,1992,38(2):713-718.
[19] Wang Y,Yu X,Zhang Y,et al.Using Wavelet Entropy to Distinguish Between Humans and Dogs Detected by UWB Radar[J].Prog Electromagn Res,2013,139(139):335-352.
本文编辑 张丹妮
Entropy-Based Algorithm for Weak Periodic Signal Recognition Using Bio-radar
XUE Hui-jun, ZHANG Yang, LV Hao, JIAO Teng, YU Xiao, WANG Jian-qi
Faculty of Biomedical Engineering, Fourth Military Medical University, Xi’an Shaanxi 710032, China
Ultra Wide Band (UWB) radar technologies for short-range detecting human targets are widely used in some special situations. Through wall detecting multi-stationary human targets via UWB radar, it is shown that the target located nearby the radar antennas is very often visible. Because of the attenuation of electromagnetic wave energy and mutual positions of the targets and radar antennas, the other targets far from radar antennas could be detected with less reliability. A novel method based on entropy is proposed, calculating the signal frequency complexity of different distances to confirm the range of detecting targets. Experimental data demonstrate that the proposed algorithm can improve the accuracy of multi-target detection effectively, and make further effort to improve the bio-radar detection efficiency.
ultra wide band radar; multi-target; entropy; signal recognition; life detection
TN957.51
A
10.3969/j.issn.1674-1633.2017.01.006
1674-1633(2017)01-0022-04
2016-08-23
2016-09-06
国家科技支撑计划课题(2014BAK12B02);国家自然科学基金(61327805)。
王健琪,教授,博士生导师,主要研究方向为生物雷达技术。
通讯作者邮箱:wangjq@fmmu.edu.cn