基于NX的水轮发电机定子线棒参数化建模方法研究
2017-02-18汪小芳东芝水电设备杭州有限公司杭州310020
汪小芳(东芝水电设备(杭州)有限公司,杭州 310020)
基于NX的水轮发电机定子线棒参数化建模方法研究
汪小芳(东芝水电设备(杭州)有限公司,杭州 310020)
对水轮发电机定子线棒端部倾斜段采用渐开线方式进行设计,在保证接线端径向尺寸和轴向尺寸的前提下,给出了渐开线所在圆锥面的半锥角所满足的数学方程,并运用Excel VBA编程手段对半锥角进行了精确求解。在此基础上,运用三维建模软件NX对定子线棒完成了参数化的设计,为线棒的模具设计提供了更精确的参考依据。
水轮发电机;定子线棒;渐开线;参数化建模;NX
0 前言
水轮发电机定子线棒的端部形状复杂,主要由铁心出口直线段、倾斜段、接线端直线段以及各段之间的圆弧过渡段构成。倾斜段部分既有径向的抬高又有轴向的爬升,还伴随着周向的扭转。传统设计中[1],采用近似作图法将线棒沿圆周方向展开,以二维平面内的几何关系对相关尺寸进行计算(下层线棒上端部的主要参数如图1所示)。在这种方法中,倾斜段部分并没有按渐开线方式进行设计,而仅是作为铁心直线段与接线端直线段的直线连接。
制造过程中,对于倾斜段部分的处理很难确定。相对于汽轮发电机,水轮发电机定子线棒的端部扭转角(图1中α)较小,大多数情况下,倾斜段采用简单的直线过渡也是可行的。但是高转速机组极数少而扭转角较大,直线过渡方式将不再适用,此时必须使倾斜段绕着某个圆锥面慢慢爬升,直至与接线端自然过渡。圆锥面选取的好坏,将严重影响线棒端部的成型质量以及相邻线棒间距的均匀性。
如果对定子线棒端部倾斜部分采用渐开线方式进行设计,则倾斜段的轨迹就是一个锥面上的一条空间曲线。当将该锥面展开时,则该曲线为一个圆的一条渐开线。这种设计保证了线棒端部的互不干涉及彼此间隙的均匀性,并保证电流强度相等及均匀可靠的通风冷却条件[2]。
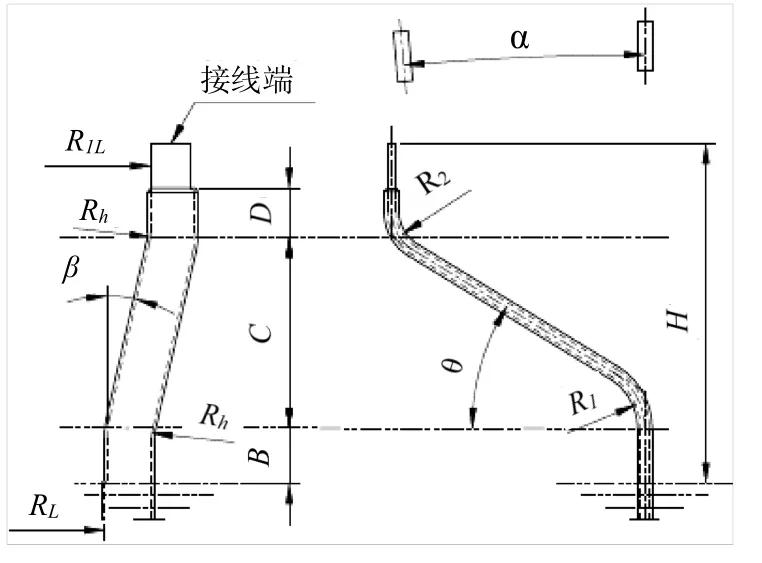
图1 下层线棒上端部示意图
近几年,国内有很多学者针对汽轮发电机定子线棒渐开线的3D建模做过一些研究[3-15]。建模方案均是在给定的扭转角α和圆锥角β的前提下,从确定的起始端向接线端“自由”延展。这种方式对于接线端的位置并没有严格限制,适用于线棒槽数较少的情况。
本文对水轮发电机定子线棒的传统设计方案进行了优化,在保持接线端给定位置的条件下,对线棒端部倾斜段进行了渐开线方式的设计,推导了渐开线所在圆锥面的半锥角所满足的数学方程,并利用Excel VBA编程手段对半锥角进行了精确求解。在此基础上,应用三维设计软件NX完成了水轮发电机定子线棒的参数化建模。
1 线棒端部渐开线结构模型
以胶化线棒(对地绝缘包扎前)内径侧宽度方向的中心线作为描述线棒的轨迹线,采用渐开线方式进行倾斜段设计的端部结构模型如图2所示(右侧为局部详图)。
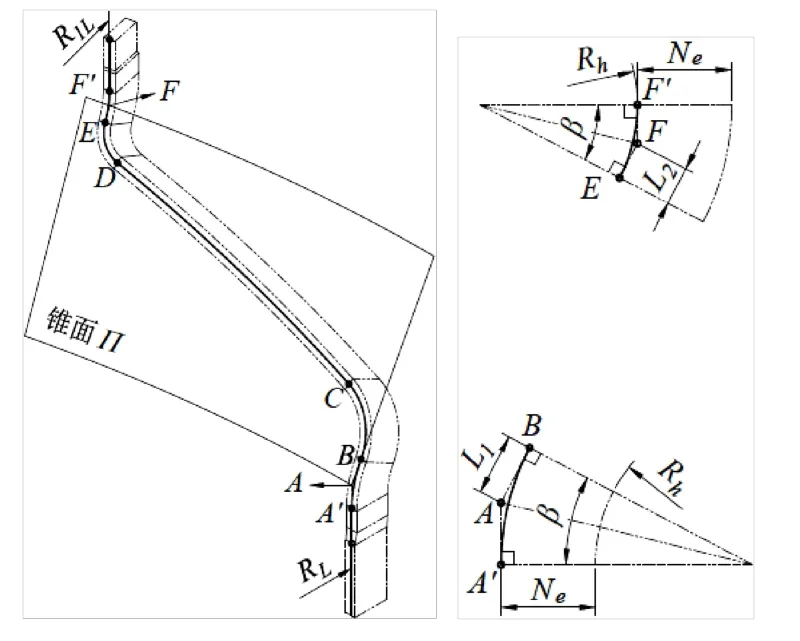
图2 线棒端部渐开线结构模型
从铁心出口直线段到接线端直线段之间的曲线主要由5段彼此相切的圆弧构成。CD段就是渐开线,BC段对应于图1中的R1圆弧段,DE段对应于图1中的R2圆弧段,这三段弧线均落在半锥角为β的圆锥面Π上。弧A'B是锥面入口直线段AB与铁心出口直线段A'A的过渡圆弧。弧EF'是锥面出口直线段EF与接线端直线段FF'的过渡圆弧。
在渐开线结构设计中,需要保证传统设计的关键位置尺寸,如铁心出口直线段的高度(即A点位置)以及接线端的径向位置(即图1中的R1L值)和轴向位置(即图1中的H值)。这就要求,在满足给定线棒间距的条件下,选择合适的半锥角β,使得从A点出发的锥面曲线经过固定的周向扭转角α,其终点的径向位置恰好为R1L。
为了达到设计要求,首先需要对定子线棒端部的曲线方程进行理论推导,得到满足条件的数学方程式。
2 线棒端部曲线方程的理论推导
已知参数:起点A至锥面轴线的距离RL;终点F至锥面轴线的距离R1L;倾斜段相邻线棒中心线间距Δ;定子线棒槽数ns;线棒端部周向扭转角α;圆弧BC的半径r1;圆弧DE的半径r2;端部线棒的高度Ne;线棒高度方向折弯半径(图2所示)Rh。
代求参数:渐开线所在圆锥面的半锥角β。
下面将通过几何角度关系推导关于β的数学方程式。
将图2中锥面上从起点A到终点F的曲线更清晰地表示为图3的样子。然后将圆锥锥面展开,得到如图4所示的定子线棒端部曲线平面展开图。
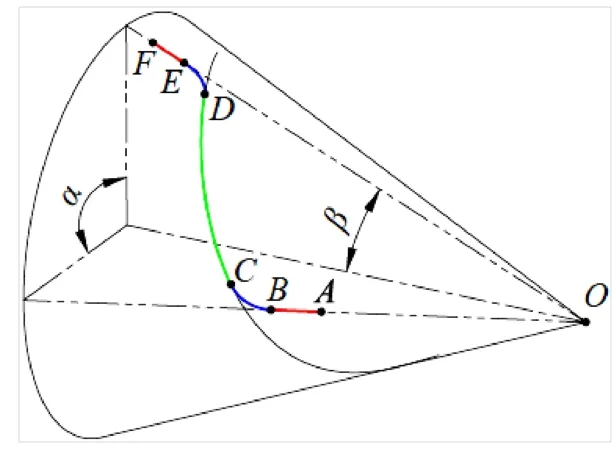
图3 线棒端部曲线三维示意图
渐开线基圆半径

入口直线段AB的长度L1

出口直线段EF的长度L2

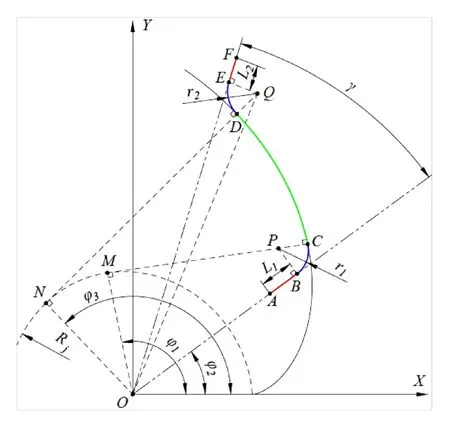
图4 定子线棒端部曲线平面展开图

在平面展开图4中,由渐开线上C点、D点做基圆的切线,切点分别为M、N。点P、Q分别为过渡圆弧BC和圆弧DE的圆心。根据渐开线的性质(渐开线上任意一点的法线必切于基圆)可知:P点在线段MC上,Q点在线段ND的延长线上。
2.1 起始部分角度关系
在Rt△OBP和Rt△OMP中,满足关系

由渐开线性质(任一点与基圆上切点的连线长等于基圆上起点到切点间的圆弧长)可知
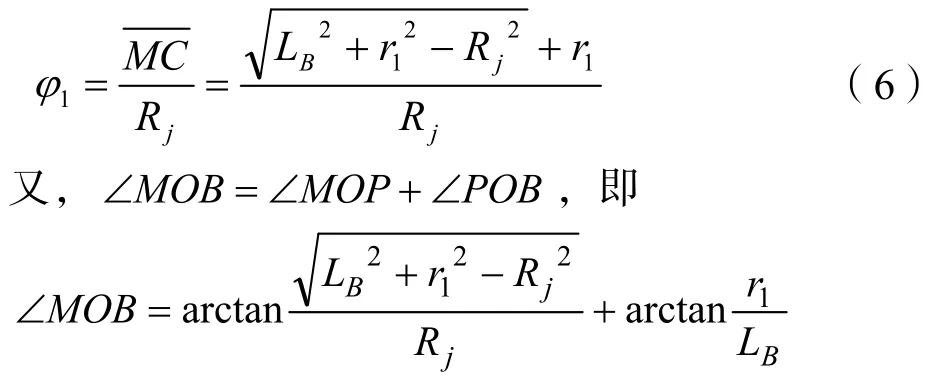
继而得到
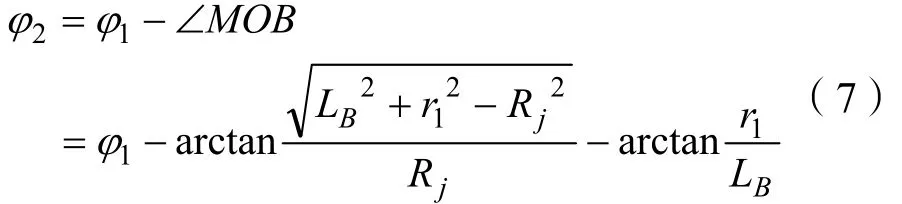
由图3根据弧长相等可得线圈端部展开角γ为

从而,直线OF与X轴的夹角为

2.2 结束部分角度关系
同样,在Rt△OEQ和Rt△ONQ中,可以得到
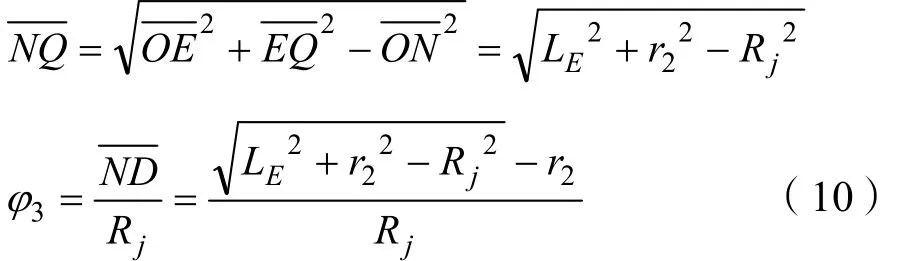
又, ∠NOE =∠NOQ-∠EOQ,即
从而,得到直线OF与X轴的夹角为
2.3 半锥角满足的数学方程
以上分别从起始端和结束端推导了直线OF与X轴的夹角,由式(9)和式(11)可以得到

将式(1)~式(8)以及式(10)代入上式即可得到关于未知量β的数学方程

2.4 半锥角的求解
式(12)是一个十分复杂的超越方程,可以运用数值方法进行求解。
首先,需要确定解的分布区间。
根据该问题的实际情况可知,所求的半锥角与传统设计中的仰角(图1中的β)应该比较接近。所以大致可以确定解区间的上限,不妨令半锥角的上限值为30°。所求区间为(Lβ,Rβ ),区间长度为1°,即L
β 初始值为1°,步进增量为1°。
然后,在给定求解域内,利用二分法求出满足精度要求的解。因为求解域宽度为1°,所以经过n次迭代之后,解的精度为
利用Excel VBA编程方法可以很容易实现上述数值求解过程,得到给定精度条件的半锥角的解。
3 定子线棒的三维参数化建模
根据以上计算所得参数以及线棒本身的截面尺寸和长度尺寸参数,即可在三维设计软件NX中进行定子线棒的三维参数化建模。
根据线棒成型特点,可以利用NX的扫掠(Swept)功能实现三维模型的建立。为此,重点是要建立引导线串(Guides)和截面线串(Sections)。
3.1 建立引导线串
以系统给定坐标系的Z轴为定子轴线,Y轴方位为线棒所在铁心的槽部位置,XY平面为铁心部分线棒的长度方向的对称面。
(1)确定锥面展开平面
在系统坐标系的YZ平面内,做出与Z轴夹角为β的图4中的长度为1L的直线段AB。A点由线棒铁心直线段的径向尺寸和高度尺寸参数确定。将直线AB绕Z轴旋转即可得到圆锥面。与圆锥面相切并且过直线AB的平面就是展开平面。
(2)建立参考坐标系
在展开平面内,以圆锥顶点为原点,AB直线逆时针转过2φ方位为X轴,建立参考坐标系,此时即得到了图4中的坐标系。
(3)绘制渐开线段
在NX中,渐开线段可以采用规律曲线(Law Curve)的方式进行绘制,也就是需要通过参数方程的形式给出渐开线的表达式。
直角坐标系中,渐开线的参数方程为

其中,jR为渐开线基圆半径,u为以弧度表示的渐开线滚动角(图4中的1φ、2φ和3φ)。

(4)绘制出口直线段
在AB直线顺时针绕过γ角度的方向,做出长度为L2的直线段EF,且E点与原点的距离为 LE。
(5)绘制过渡圆弧
至此,完成了展开图中的曲线段的绘制。
(6)得到锥面曲线
利用NX的缠绕曲线(Wrap Curve)功能,将上述得到的曲线段以展开平面为切平面缠绕到圆锥曲面上,即可得到图3所示的端部曲线。
之后建立线棒铁心端和接线端的直线段,再如图2所示,做出线棒高度方向折弯的过渡圆弧 A'B和圆弧 EF'。
这样,就得到了线棒建模所需的引导线串。
3.2 建立截面线串
截面线串控制着三维模型沿引导线扫掠过程中截面尺寸的变化。为了得到较为精确的三维模型,在截面尺寸变化位置(比如出槽口和端部接线处)以及引导线上圆弧过渡位置(图2中的 A'点、B点、C点、D点、E点、 F'点)都应该在引导线串的法平面内绘制截面形状。
3.3 扫掠成型
利用NX的扫掠功能,选择之前建立的截面线串和引导线串,指定连续精度(Position)和相切精度(Tangent)均为0.01,即可一次性得到定子线棒的三维参数化模型。
某水轮发电机上、下层定子线棒模型如图5所示,其整体装配如图6所示。
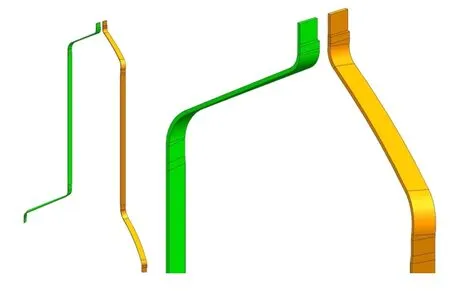
图5 上、下层定子线棒模型
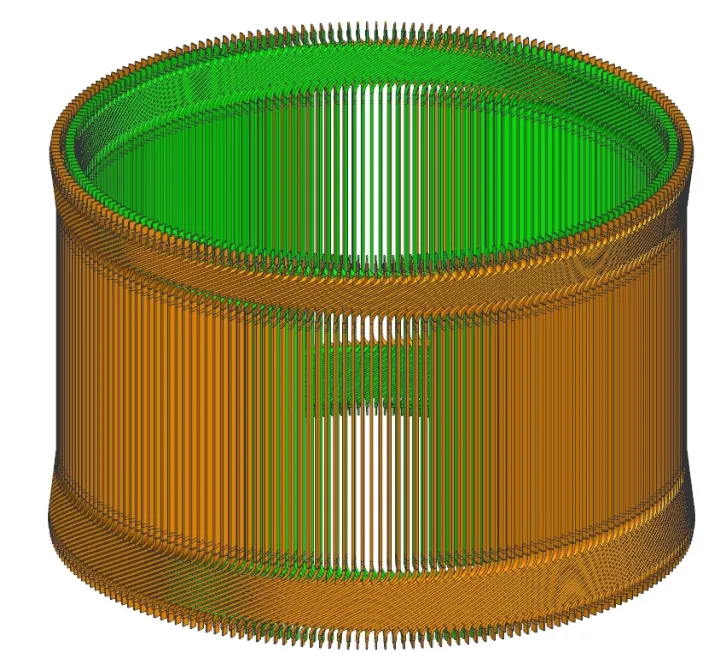
图6 定子线棒装配模型
3.4 模型精度
扫掠过程中,铁心直线段的截面尺寸可以完全得到保证,而端部曲线段由于变化复杂,线棒的断面尺寸容易“失真”。某电站定子线棒截面尺寸的设计值与三维模型测量值之间的对比参见表1。
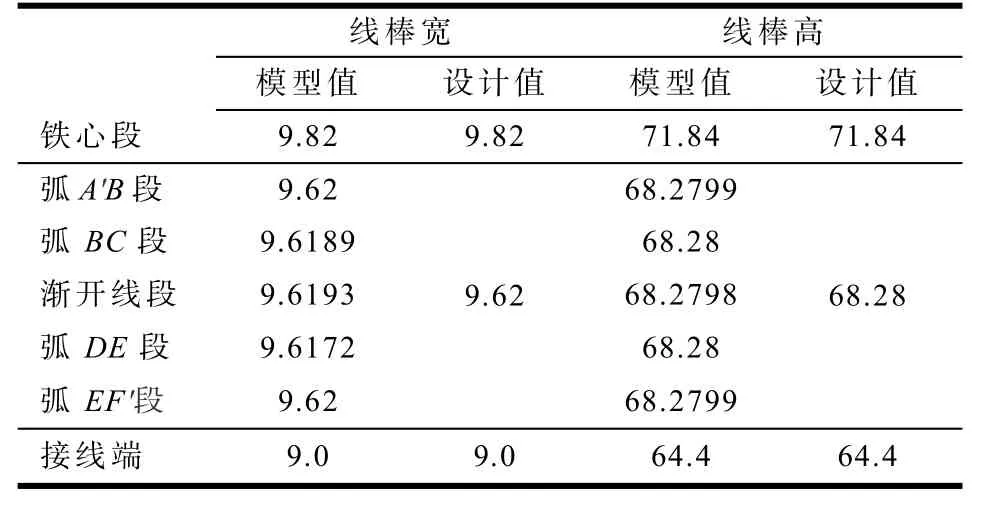
表1 线棒截面尺寸对比 mm
由表1的对比数据,可以看到:
(1)直线段的模型值和设计值完全吻合;
(2)无论直线段还是曲线段,线棒高度方向的尺寸几乎和设计值一致,最大偏差为0.0002mm,可以忽略不计;
(3)线棒宽度方向尺寸,除了渐开线段及其前后端的过渡圆弧段内有偏差,其他部位与设计尺寸一致,最大偏差也仅为0.0028mm,可以忽略不计。
所以,该方法建立的定子线棒参数化模型完全可以满足设计精度要求。
4 结论
本文利用渐开线方式对水轮发电机定子线棒端部倾斜部分进行了精确设计。在保证传统设计确定的接线端径向尺寸和轴向尺寸的前提下,经过详细的理论推导,给出了渐开线所在锥面的半锥角所满足的数学方程,并利用Excel VBA编程手段对半锥角进行了精确求解。在此基础上,运用3D设计软件NX完成了定子线棒的三维参数化建模。
三维模型完全由设计参数控制,而且模型精度非常高,可方便地用于线棒模具的设计,加速实现模具的数控加工。
水轮发电机定子线棒三维参数化模型的建立,极大地提高了定子端部线棒的设计效率与自动化程度,并为发电机定子端部绕组在振动、散热、电磁平衡等问题的分析和研究工作奠定了模型基础。
[1]白延年.水轮发电机设计与计算[M].北京:机械工业出版社,1982:218-223.
[2]阮江军,陈贤珍.汽轮发电机端部 3D涡流场计算中定子线圈端部渐开线的三维解析表示[J].大电机技术,1995(6):21-24.
[3]金丽萍,何圣熙.基于 Pro/E的汽轮发电机定子绕组精确建模[J].机械设计与制造,2006(10):38-40.
[4]胡建波,徐福娣.定子端部线圈的设计计算方法与三维建模研究[J].上海大中型电机,2006(4):14-18.
[5]金丽萍,何圣熙.Pro/ENGINEER中的汽轮发电机定子绕组三维建模及参数系列化设计[J].工程图学学报,2007,28(2):31-38.
[6]李亭,彭攀.定子线圈端部的曲线方程的推导以及计算方法[J].上海大中型电机,2010(4):28-32.
[7]刘晓芳,杨世彦,刘大鹏,等.基于 I-DEAS的汽轮发电机定子绕组自动三维建模[J].中国机械工程,2011,22(3):317-321.
[8]刘瑞丽,魏燕飞.汽轮发电机定子线圈端部设计的精确计算[J].上海大中型电机,2011(4):23-26.
[9]张青雷,钱广璞.汽轮发电机定子绕组参数化建模方法研究及系统开发[J].图学学报,2014, 35(4):541-547.
[10]张干,张丽.汽轮发电机定子线圈模型的建立[J].东方电机,2006,34(3):39-41.
[11]李勇,李娟,杨远洪,郑巍.大型汽轮发电机定子绕组端部三维模型的建立[J].北京信息科技大学学报(自然科学版),2013(6):29-33.
[12]周华翔.汽轮发电机定子线圈端部渐开线3D建模实例[J].电机技术,2014(6):20-22.
[13]刘瑞丽,魏燕飞,苏建萍,柳成行,黄景荣.汽轮发电机定子线圈端部计算及线模的三维参数化设计[J].电机技术,2014(6):4-7.
[14]任盼秋,严欣平,周光厚,韩伟峰.1150MW核能发电机定子端部绕组三维建模[J].大电机技术,2012(4):17-20.
[15]明哲.基于Siemens NX的电机定子线圈三维参数化建模[J].制造业自动化,2013,35(7):57-59.
汪小芳(1978-),2004年7月毕业于浙江大学固体力学专业,硕士,从事有限元解析和3D设计工作,现任东芝水电设备(杭州)有限公司CAE计算中心主任,高级工程师。
审稿人:胡刚

[作者简介]
杨烽(1982-),2007年7月毕业于重庆大学电气工程与自动化专业,目前主要从事水力发电厂电气一次维护及技术管理工作。
审稿人:满宇光
Parametric Modeling Method for Stator Coil of Hydro generator Based on NX
Wang Xiaofang
(Toshiba Hydro Power(Hangzhou)Co.,Ltd.,Hangzhou 310020,China)
Involute shape is designed for the inclined section of the end of hydro generator stator coil. In order to keep the radial and axial position of the terminal,the mathematical equation of the half cone angle of the conical surface where the involute lies is given,and the equation is solved by Excel VBA programming.Using the value of cone angle and other known parameters,the parametric model of stator coil is built by 3D software NX and it provides a more accurate reference for tool design of stator coil.
hydro generator;stator coil;involute;parametric modeling;NX
TM312.1
A
1000-3983(2017)01-0024-05
2015-5-10