图书上下架机器人的结构设计及其机器手的样机试验
2017-02-17北京联合大学生物化学工程学院杨志成任惠荣
北京联合大学生物化学工程学院 王 宏 杨志成 任惠荣
图书上下架机器人的结构设计及其机器手的样机试验
北京联合大学生物化学工程学院 王 宏 杨志成 任惠荣
在分析了现有的图书馆机器人的基础上,提出了一种可重构变形的图书上下架机器人。将机器人分为机器手、升降机构和行走机构三部分,并对各部分的功能、结构和尺寸进行了分析。依照设计方案制作了机器手样机,并对机器手样机进行了实验室拿取图书的实验,实验效果达到预期目的。
图书馆机器人;结构设计;重构变形;样机试验
目前全国图书馆、档案馆的规模在发生日新月异的变化。图书的日常管理中,分类、运输和上下架等作业需要花费大量的人力和物力,难免会出现图书分类错误和倒书错误。一些国家在图书馆机器人方面进行大量研究。在2002 年美国犹他州J.Willard Marriott 图书馆成功地研制了一种大型自动图书存取中心(Automated Retrieval Center,简称 ARC)。它采取立体化仓库设置[1]。搬运机器人在德国洪堡大学图书馆和日本大阪市立大学图书馆中已经得到应用[2]。美国约翰·霍普金斯大学的研究人员提出了一种完整意义上的图书馆机器人[3]。2010年底,在北京、上海、广州、深圳、郑州、鄂尔多斯等人口密集地区,相继推出了微小型自动化图书库[4]。
但是,现有的图书馆机器人普遍存在的问题是:机器手不够专业,无法用一只手在密集的书本之间对书本自主进行上下架操作;机器人相对矮小,无法码放书架高层的图书;常规四轮行走机构在较窄的运动空间中改变位姿困难,机器人与书架之间的相对位姿不易控制。
1.图书上下架机器人的整体设计
针对上述机器人出现的问题,根据TRIZ(theory of inventive problem solving)意译为发明问题的解决理论。提出一种可以重构变形机械结构的机器人,图书上下架机器人结构简图如图1所示。它的主体由图书上下架的机器手部分、升降部分和行走部分组成。
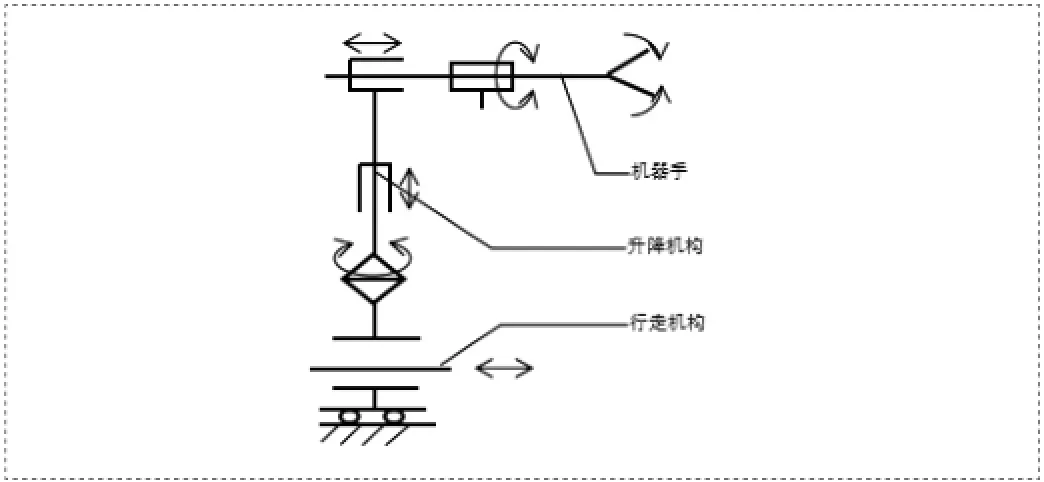
图1 图书上下架机器人结构简图
2.机器手机构的分析设计
2.1 机器手机构的特性分析
图书馆机器人机器手的工作区域由电机的旋转运动轨迹和丝杠的直线运动轨迹而确定,因此选用执行机构为转动副和移动副构成的复合运动副。转动副由三个直流电机实现,移动副由一个直流电机和一个丝杠实现[5]。工作部分具体由四自由度机器臂、电源、控制器以及传感器云台组成。其中机器臂由基座、大臂、小臂、腕关节和手等部分组成,显然四自由度的机械臂有很大的作业空间。在工作过程中,机器人先要进行目标图书所在位置获取,根据目标图书位姿信息自主调整机器手的位姿,实现对目标物体的精确定位、抓取、夹持、搬运与码放。机器人的所有关节都由直流电机驱动,每个电机都带有减速箱和码盘反馈,反应各个关节所对应的位置[6]。
2.2 机器手机构的设计
如图2所示,丝杠相当于机器臂。它由丝杠和导轨组成,它们之间相对位置变化决定了机器臂的长度。机器手安装在丝杠平台上,机器手也是机器手指的运动平台。手指部分如图2所示。丝杠平台处固定两个手指电机,固定了电机就确定了手指的安装位置,固定方式可以采用螺栓连接[6]。
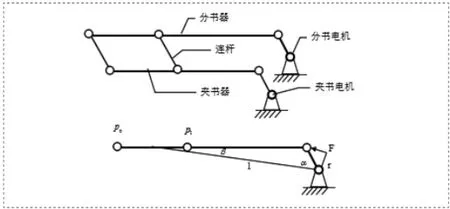
图2 机器手结构简图及受力分析图
机器手主要包括:分书器、分书电机、夹书器、夹书电机等部件。分书器与夹书器之间通过连杆耦合铰接,分书电机与夹书电机安装在丝杠云台上,位置固定。将电机的运动状态分为:停止、正转、反转。两个电机运动状态进行耦合,它们之间的机械运动构成了分书、夹书、取书、存书等复杂运动。电机运动与机器手运动状态对照如表1所示。

表1 电机运动与机器手运动状态对照表
机器手结构如图3所示。分书电机带动分书器丝杠转动,而夹书器电机不转动,使得分书器连杆张开,分书器连杆与夹书器连杆之间有4个连杆连接。当分书器张开到与书同厚时,夹书器也张开到同样宽度,伸缩臂继续伸出,将书送达书架最里层。夹书器电机开始工作,带动夹书器丝杠转动。使得夹书器向外运动并继续张开。此时有两种情况产生,一是分书器两侧图书架上的图书被分开;二是夹书器张开到连杆与夹书器超过90º角时,夹书器对图书的夹力逐渐减小,角度大到一定时减小为零,伸缩臂收回,夹书器、分书器依次闭合。
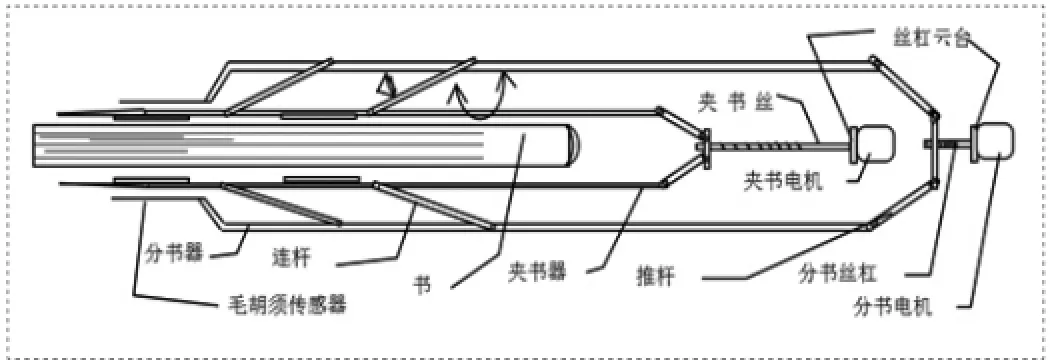
图3 机器手结构示意图
2.3 机器手的尺度分析
机器手的大小决定机器人能否顺利地拿取图书、存放图书。它的大小取决于市场通用图书的大小:以大16K精装书成品尺寸: 297毫米╳210毫米╳20毫米为例。机器手一般拿捏图书中间位置最为稳定。机器手分书器为125毫米,夹书器大小为110 毫米。连杆长度为15毫米,在夹书过程中可以超过书本的厚度,不会夹书过程中损坏书皮。夹书器内部装有两块麻糙布块,以增加夹书器与书籍之间的摩擦力,防止图书滑落。
在机器手的控制中,电机的负载是考虑的重要因素。为了保证机器手有足够的力矩输出对书籍存取,还要防止电机过大,自身重量也大,给上一级造成内耗。将上述双连杆机构分解为两个单环机构,一个单环受力分析图所示。其约束条件为:

R为电机输出轴的半径,l为输出轴到两个支点距离之和的一半。
由于连杆的转动惯量较小,可以忽略不计,因此,电机在输出轴上的力为:

A为加速度,P0为0支点反作用力,P1为1支点反作用力。
输出轴的角速度为:

经过上述分析,通过实验可以确定电机力矩大小,从而设计电机的大小和型号。
3.试验与结论
3.1 机器手样机试验
通过试验,可以检验项目设计的各个结构是否符合设计要求,同时发现设计的不足,并加以改进,提高研究项目的功效。在本试验中,主要验证机器手的动作,因为单手符合铰接机构作为机器手被首次提出,因此它是试验的关注重点。
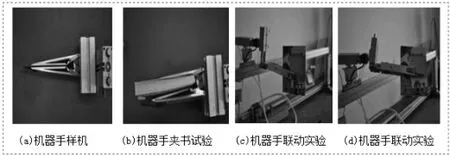
实验步骤:首先按照设计要求,制作机器手样机,样机如图(a)所示;对两个直流电机进行通电试验,机器手顺利地夹持图书,夹书效果如图(b)所示;机器手是以机器臂为平台工作的,图(c)和图(d)是在机器臂平台上做的联动实验。
3.2 结论
图书上下架机器人融合了机械技术、电子技术、传感器技术和信息技术等学科。图书上下架机器人机构设计简单,易于进行电气控制;实现了四轮行走机构与书架之间的相对位姿控制问题;达到了用一只手在密集的书本之间对书本进行上下架操作;解决了对书架高层图书的码放问题。试验验证了样机的有效性,完成了预期目标。
[1]崔建伟,宋爱国,庄皓兰,等.机器人技术在图书馆自动化系统中的应用研究[J].机器人技术与应用,2009(06):18-20.
[2]图书馆机器人[J/OL].2008-04-08 [2014-03-21].http:// blog.sina.com.cn/s/blog_4978019f01008w1q.html.
[3]Suthakorn J,Lee S,Zhou Yu,et al.A Robotic Library System for an Off-Site Shelving Facility[C].Washington DC:Proceedings of the2002 IEEE International Conference on Robotics & Automation,2002:3589-3594.
[4]方建军,张晔.图书馆图书自动存取机器人的研究与应用[J].图书馆建设,2012.7:79-81.
[5]杨志成,张利霞,张景胜.图书上下架机器人:中国,20111007408.6[P].2011-3-25.
[6]杨志成,张景胜,张利霞.图书上下架机器人机器手控制器设计与实现[J].现代制造工程,2011.4:42-45.
王宏,女,北京联合大学,实验师,研究方向:自动控制。
杨志成,男,北京联合大学,高级实验师,硕士,研究方向:机械设计与控制。