进场动力补偿器对自动着舰系统的影响
2017-02-15董然原新张智张雯
董然, 原新, 张智, 张雯
(1.中国船舶工业系统工程研究院 航空系统研究所, 北京 100094;2.哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 150001)
进场动力补偿器对自动着舰系统的影响
董然1, 原新2, 张智2, 张雯2
(1.中国船舶工业系统工程研究院 航空系统研究所, 北京 100094;2.哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 150001)
针对保持迎角恒定的动力补偿器(APC)能否兼顾保持舰载机进场空速的问题,结合H-dot指令自动着舰系统(ACLS)的工作特点,对舰载机自动着舰过程中最常见的3种指令响应情况进行了理论分析。基于H-dot指令ACLS的控制器基本构型,通过仿真研究了保持迎角恒定APC中各类指令信号对ACLS纵向控制性能的影响。仿真结果表明:不同APC指令信号对ACLS纵向控制的影响程度不同;只要稳态飞行时舰载机航迹角不变,保持迎角恒定的APC就能维持进场舰载机的空速恒定。
迎角恒定; 空速恒定; 纵向控制
0 引言
舰载机着舰过程中,变幻莫测的舰尾大气扰流和晃动的甲板使精确控制飞行轨迹特别困难[1]。自动着舰系统(Automatic Carrier Landing System, ACLS)能使舰载机在各种环境下自动进场并着舰,大大减轻了飞行员的操作负担,提高了着舰成功率。进场动力补偿器(Approach Power Compensator, APC)是ACLS必不可少的机构,它能自动操纵舰载机油门杆来控制发动机推力,辅助改善舰载机长周期运动特性[2]。事实上,无论飞行员选取何种着舰模式,APC都必须开启。这是因为舰载机在着舰阶段飞行速度低,发动机工作在阻力曲线背面,航迹控制稳定性差,容易引起失速。APC的接入能及时补充推力,使飞行员专注于控制飞行姿态和航迹,有利于提高着舰精度[3-6]。
应用中的APC主要基于保持空速或迎角恒定两种设计方案。本文主要研究具有迎角保持能力的APC对ACLS纵向控制的影响,如APC能否兼顾舰载机进场空速的保持,以及各指令输入在ACLS纵向控制中的作用。研究以某型舰载机的着舰运动模型为被控对象,并规定ACLS具有H-dot指令模式。
1 迎角保持APC的速度调节能力
通常所说的APC保持迎角或者空速恒定,是指舰载机纠正轨迹或者姿态偏差后达到稳态时,其迎角或空速在APC的作用下维持在标称值(配平值)。本文要讨论的“保持迎角恒定APC的空速维持能力”基于以下前提条件:
(1)研究对象是经过控制作用后又进入稳态飞行的进场舰载机,侧重于分析ACLS的稳态特性,而不考虑风的持续作用。这是因为在大气紊流作用下,进场舰载机的空速和迎角都无法保持恒定[7]。
(2)ACLS具有H-dot指令模式,规定控制系统是稳定的,并且在自动驾驶仪的作用下已具备良好的姿态保持能力。
根据ACLS控制下的舰载机着舰运动的特点,重点讨论3种最有代表性的情况。情况Ⅰ:无风,控制作用纠正了舰载机航迹偏差;情况Ⅱ:无风,舰载机改变航迹,且新航迹与原基准航迹倾角不同;情况Ⅲ:有阵风,阵风过后舰载机仍保持原基准航迹飞行。其余情况可视为这3种情况的有机结合。
1.1H-dot指令ACLS的基本结构

自动驾驶仪采用舰载机垂直速度和垂直加速度作为基准反馈信号(可分别通过反馈航迹角和法向过载来实现),因而通常被称为“H-dot指令ACLS”[8]。
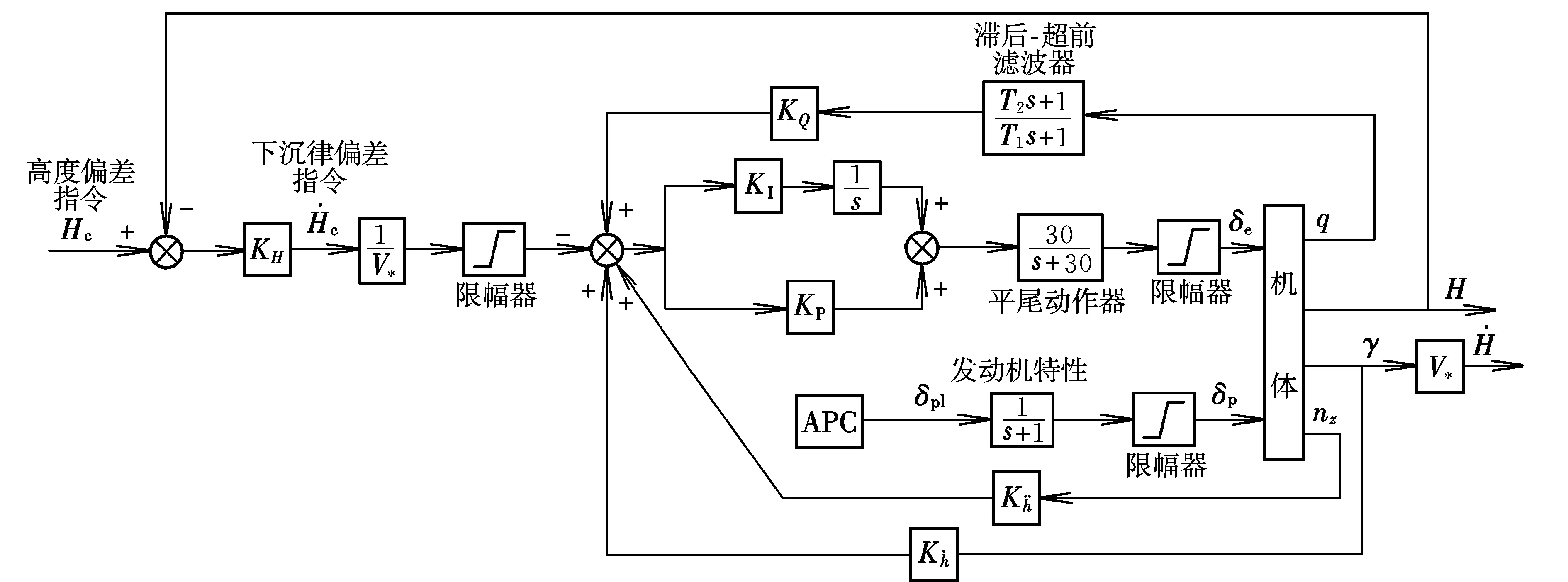
图1 H-dot指令ACLS的纵向飞行控制律Fig.1 Longitudinal flight control law in H-dot ACLS
1.2 舰载机着舰纵向运动线性模型
不计大气扰动的影响,舰载机在着舰阶段的纵向运动可用式(1)的小扰动线性模型来描述,它是舰载机非线性运动方程在基准状态处线性化的结果[9]。该基准状态为:无任何外界干扰,舰载机保持配平迎角、匀速等角下降的稳态飞行过程。
(1)
其中:
A=[A1A2]
式中:δc为鸭翼偏转角;xv,yα,μq为舰载机纵向稳定性和操纵导数,其定义和计算方法见文献[9]。
1.3APC速度保持能力分析
尽管早年有国外研究报告指出,保持迎角恒定的APC兼有空速保持能力[10-11],但有关该命题的论证尚不多见。文献[12-13]以俯仰姿态指令ACLS为控制构型,证明了保持迎角恒定APC使舰载机在完成高度纠偏后,空速也保持不变。本文根据H-dot指令ACLS的控制进场过程,以前文给出的3种机动情况来研究该命题。
(1) 情况Ⅰ。根据式(1),舰载机的空速扰动满足式(2),式(2)经拉普拉斯变换后为式(3)(变换时省略符号“Δ”,即α(s),γ(s),δp(s),H(s)等均表示其对应状态扰动量的拉普拉斯变换,下同)。
(2)
(3)
由于ACLS使舰载机回到基准航迹(指令下滑道),且ACLS内含保持迎角恒定的APC,根据拉氏变换终值定理,有式(4)成立:
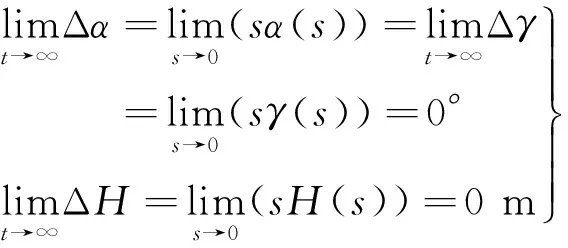
(4)
考虑到通常情况下舵机的控制律中不含飞行速度反馈,且升降舵和油门杆之间一般不存在控制交联,从而影响升降舵偏角的状态量,如高度偏差指令、舰载机俯仰姿态、俯仰角速率、过载、下沉率、航迹角等,当舰载机回到基准航迹进入稳态飞行时均无扰动。所以,舰载机升降舵的稳态位置仍为基准值;同理,油门的稳态位置也基本不变;至于鸭翼,通常不作为舰载机着舰阶段的控制机构。因此有式(5)成立,进而将拉氏变换终值定理用于式(3)后可得式(6),即舰载机空速的稳态值为其基准值。
(5)

(6)

(7)
对于舰载机舵面偏转角和油门开度,根据它们的常见控制规律,两者的稳态值相比其在原基准状态可能都有变化。因此,根据式(3),并结合拉氏变换终值定理,可通过式(8)计算舰载机变轨后的空速扰动,它是一个随时间连续变化的函数。
(8)
(3)情况Ⅲ。参照情况Ⅰ的分析可知,舰载机抵御阵风过后,升降舵偏角与油门开度均与阵风作用前相同。对舰载机稳态进场飞行进行受力分析,得到平衡方程,继而得到舰载机迎角正切值为:
(9)
式中:P,L,D为舰载机发动机合推力、气动升力和气动阻力;m为舰载机质量;g为重力加速度;ρ为大气密度;S为机翼面积;CL和CD分别为舰载机升力系数和阻力系数。
考虑到升力系数和阻力系数主要受到升降舵偏角和迎角的影响,而舰载机质量在进场着舰阶段可近视为常数[6],式(10)表明舰载机空速基本不变。
综合以上3种情况得出结论:在H-dot指令ACLS的控制进场过程中,采用保持迎角恒定的APC能否维持舰载机稳态飞行时空速不变,主要取决于舰载机航迹角是否发生改变:若航迹角不变,则舰载机空速基本维持恒定;反之,空速的变化量与航迹角变化有关,是关于时间的函数。
2 APC对纵向ACLS的影响
图1所示H-dot指令ACLS中,具有迎角保持能力的APC的常见控制律结构为式(10)[1,14];舰载机运动仍用式(1)来描述,模型具体参数见文献[9]。
(10)
式中:δec为升降舵俯仰指令;KαP,Kq,Knz等均为APC中的控制增益。

APC俯仰角速率反馈对纵向ACLS阶跃响应的影响如图2所示。可以看出:增益取校准值时,纵向ACLS具有最佳的综合控制效果;增益降低使高度阶跃响应的超调量变大,舰载机达到俯仰稳态的时间增加,而过快的俯仰角速率响应会使其过渡过程具有尖锐的波峰,也对系统性能不利。参数偏离校准值对迎角和空速的影响主要是降低了它们的长周期响应的阻尼,振荡加剧但并未引起发散。
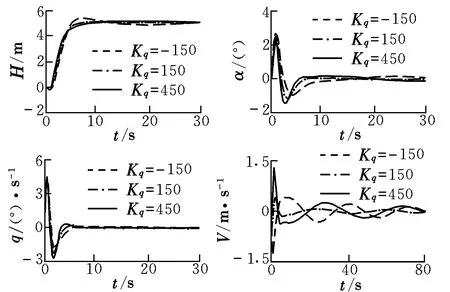
图2 APC俯仰角速率反馈对纵向ACLS阶跃响应的影响Fig.2 Effect of APC pitch rate feedback on longitudinal ACLS step response
APC升降舵指令前馈增益对纵向ACLS的阶跃响应影响如图3所示。显然,舵面偏转角对高度控制以及对保持迎角和空速影响很大。增大的舵指令增益使系统高度、迎角和空速的长周期响应的振荡程度加剧,甚至发散;而当该增益偏离校准值减小时,主要影响系统的短周期响应特性,但不会使系统发散。此外,舰载机俯仰角速率响应并未因变化的舵指令增益而发散,这是因为俯仰角速率稳定性主要受自动驾驶仪内环的角速率反馈的影响[14]。
APC迎角反馈比例增益对纵向ACLS阶跃响应的影响如图4所示。可以看出,当该增益偏离校准值变大时,系统超调量和调节时间增加,进入稳态后迎角扰动为0,空速也基本维持在配平值附近;当该增益相对校准值减小时,迎角响应趋于发散,空速保持能力也逐渐恶化。此外,该增益对舰载机高度和俯仰角速率响应的影响较小。
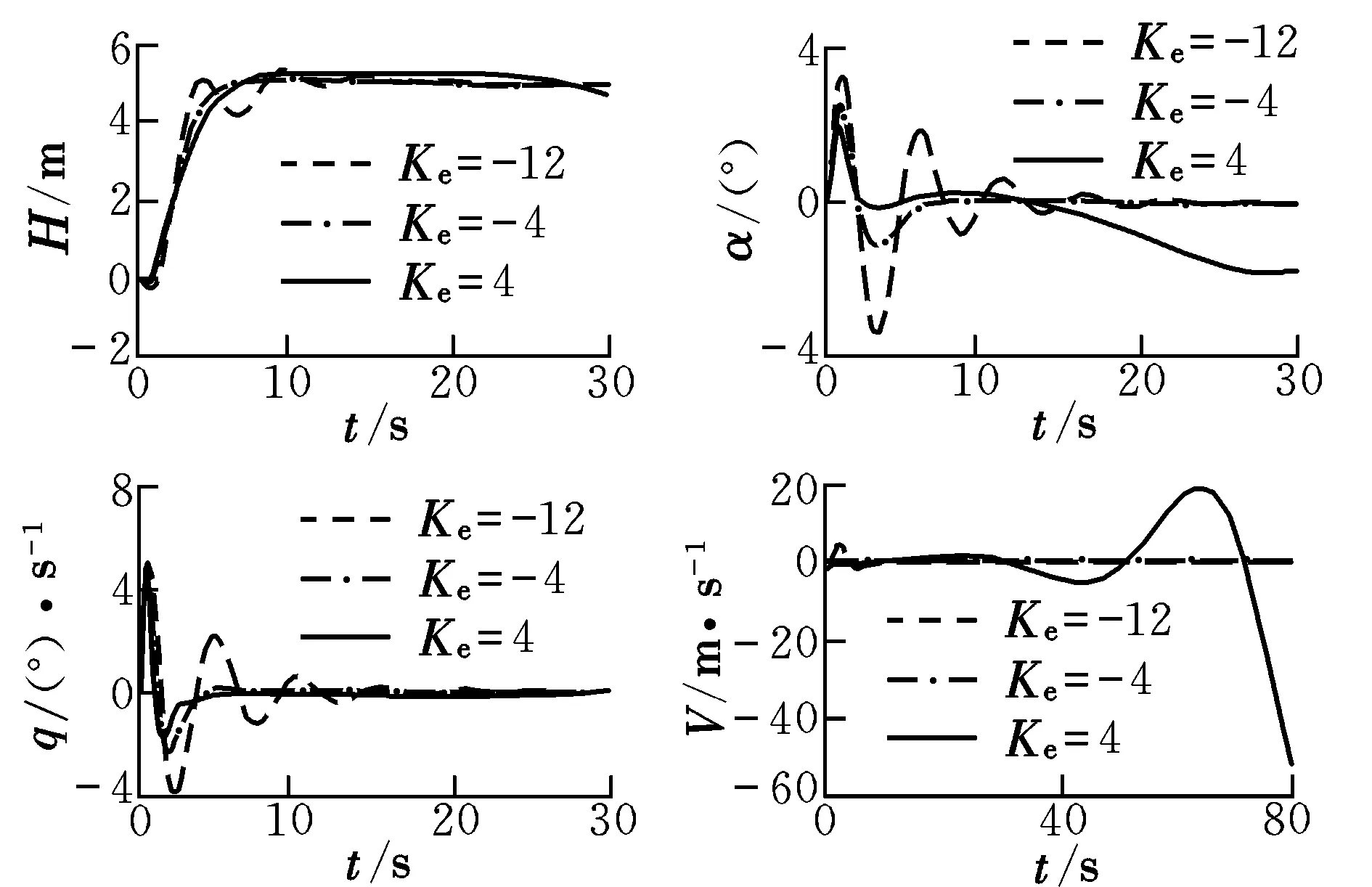
图3 APC升降舵指令前馈对纵向ACLS阶跃响应的影响Fig.3 Effect of APC elevator feed forward command on longitudinal ACLS step response

图4 APC迎角反馈比例增益对纵向 ACLS阶跃响应的影响 Fig.4 Effect of APC attack angle feedback proportion element on longitudinal ACLS step response
改变APC迎角信号反馈的积分增益后,系统的迎角保持能力与空速保持能力仍然正相关,若无法稳定迎角,则空速终将快速发散。相比APC中迎角反馈信号的比例环节,积分环节的变化对于系统高度和俯仰角速率响应的影响更小,此处不再赘述。
综上所述:APC升降舵指令前馈和扰动迎角反馈对纵向ACLS控制效果有显著影响;调节APC各输入的增益对舰载机俯仰角速率响应的稳定性影响不大;APC法向过载指令的反馈增益对系统影响最小,俯仰角速率反馈增益的变化主要影响舰载机高度响应超调量以及迎角和空速响应的阻尼,从而改变系统长周期响应特性。另外,如果改变ACLS的控制参数后APC仍能维持舰载机迎角恒定,则舰载机空速也终将回到配平值。这是因为,仿真中加入高度偏差指令虽然改变了舰载机进场航迹,但并未改变指令航迹角,舰载机响应指令达到稳态后仍然处于原基准飞行状态,仿真结果印证了1.3节对情况Ⅰ进行分析得出的结论。
3 结论
本文研究了保持迎角恒定的APC对H-dot指令纵向ACLS的影响,并得出以下结论:
(1)只要舰载机稳态进场时的航迹角保持不变,APC也能维持舰载机空速不变;
(2)APC指令输入的升降舵指令前馈和扰动迎角反馈对H-dot指令ACLS纵向控制的影响最为显著,而法向过载反馈的影响最弱。
[1] 杨一栋,余俊雅.舰载机着舰引导与控制[M].北京:国防工业出版社,2007:27-42,113-119.
[2] 李应涛.舰载飞机的进场动力补偿和自动油门控制系统设计[D].成都:电子科技大学,2007.
[3] 杨一栋.舰载机进场着舰规范评估[M].北京:国防工业出版社,2006:13-28.
[4] Craig S J,Ringland R F,Ashkenas I L.An analysis of navy approach power compensator problems[J].Journal of Aircraft,1972,9(10):737-743.
[5] 钟涛.带有舰尾流的舰载机进场动力补偿系统分析[J].中国舰船研究,2013,8(3):6-11.
[6] Durand T S,Wasicko R J.Factors influencing glide path control in carrier landing[J].Journal of Aircraft,1967,4(2):146-158.
[7] Brockhaus R,Alles W,Luckner R.Flugregelung[M].3rd ed.New York:Springer,2011:152-166.
[8] Hess R K,Urnes J M.Development of the F/A-18A automatic carrier landing system[J].Journal of Guidance,Control,and Dynamics,1985,8(3):289-295.
[9] 夏桂华,董然,许江涛,等.考虑扰流的舰载机终端进场线性模型[J].航空学报,2016,37(3):970-983.
[10] Martorella P,Kelly C P,Nastasi R.Precision flight path control in carrier landing approach:a case for integrated system design [R].AIAA-81-1710,1981.
[11] Nstasi R,Martorella P,Huff R,et al.Carrier landing simulation results of flight path controllers in manual and automatic approach[R].AIAA-83-2073,1983.
[12] 张玉洁,杨一栋.保持飞行迎角恒定的动力补偿系统性能分析[J].飞行力学,2006,24(4):30-33.
[13] 杨一栋,江驹.保持飞行迎角恒定的飞行/推力综合控制[J].航空学报,1996,17(4):460-464.
[14] 彭兢.舰载飞机进舰着舰的自动引导和控制研究[D].北京:北京航空航天大学,2001.
(编辑:李怡)
Influence of approach power compensator on ACLS
DONG Ran1, YUAN Xin2, ZHANG Zhi2, ZHANG Wen2
(1.Aviation System Research Department, SERI, Beijing 100094, China;2.College of Automation, Harbin Engineering University, Harbin 150001, China)
For the problem of whether the APC which keeps the AOA constant can hold the airspeed or not, combine with the features of ACLS with a vertical rate reference (H-dot), three most common cases of command responding during autonomous carrier approach was analyzed. Moreover, using a general control architecture of H-dot ACLS, the APC which can hold AOA of a carrier-based aircraft, was examined to investigate the effects of all its command inputs on the longitudinal control performance of ACLS. Simulated results show that different command signals into the APC can affect longitudinal control of ACLS in different ways and to different degrees, and the APC with AOA keeping capability can maintain the airspeed as long as the track angle of the aircraft is constant in the steady-state approach fligh.
constant angle of attack; constant airspeed; longitudinal control
2016-05-29;
2016-10-13;
时间:2016-11-10 09:10
国家自然科学基金资助(61304060)
董然(1987-),男,山东济南人,工程师,博士,主要研究方向为控制理论与控制工程; 原新(1974-),女,辽宁海城人,副教授,博士,研究方向为机器感知与智能控制。
V271.4; V249.1
A
1002-0853(2017)01-0034-05
