法拉利悬架系统结构原理与维修(三)
2017-02-13浙江宁振华
浙江/宁振华
三、Skyhook 系统
悬架阻尼控制系统“Skyhook”设计用于连续控制减震器阻尼。
其目的是根据路面状况和汽车的动态条件调节减震器,从而提高舒适性和路面保持性。该系统包括:
◆“Skyhook” 电子控制单元
◆汽车中的加速度传感器
◆减震器内安装的电磁阀
电子控制单元持续读取传感器,从而驱动电磁阀。
1.工作逻辑
通过对每隔10ms获取的瞬时车速值和车身与车轮间的相对速度进行比较分析,电子控制单元在压缩和伸展阶段,都会修改每个车轮的阻尼,制动汽车在垂直方向的绝对运动,如同车身被减震器悬挂在天空中。原理图如图34所示。

图34 减震器工作原理图
◆车身对来自车轮的受力敏感性较低
◆在动态操控中,侧倾和俯仰减少
与作为独立应用的首个Skyhook系统相比,电控单元已经集成于C CAN网络中,从而获得一系列的效益:
(1)由于Skyhook与ESP系统的集成工作,提高了弯道中的稳定性控制(转向不足/转向过度)。
◆ESP 激活之前(即精确的转向不足/转向过度限值超过之前):车轴之间阻尼分配变化的控制可以纠正转向过度/转向不足,延迟任何ESP激活和(或)降低其动作的激烈程度
◆ESP 激活过程中:通过Skyhook系统控制车身运动,可以减少ESP 系统激活引起的突然的俯仰或侧倾变化
(2)由于提供了“转向角速度”信号,提高了在弯道中车身横向动态的控制,包括稳定转速和瞬变转速(突然转向)。这还增强了在有减速带的直道上的车身控制。这是因为避免了横向加速度产生的信号峰值引起的干扰。
(3)在驾驶员的加速器和制动器动作作用下提高了俯仰控制,这是由于提供了“加速器踏板速度”和“制动泵主回路压力”信号,而不仅仅是“制动灯激活”信号。
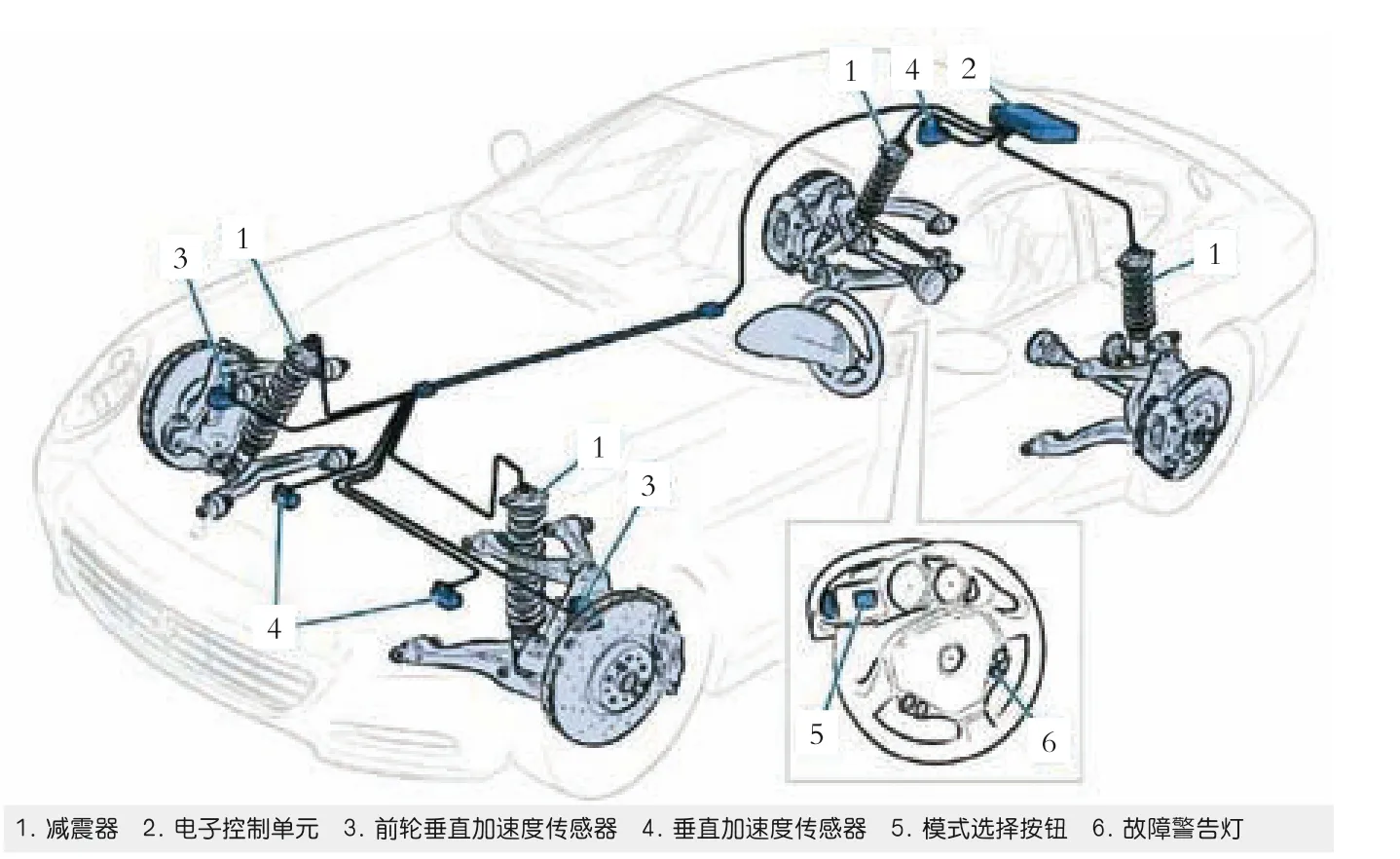
图35 Skyhook系统部件位置
(4)在ASR/ABS激活过程中提高了牵引/制动性能,这是因为在ASR/ABS激活过程中,可以特殊调制取决于道路不平度的转角前后阻尼。
(5)通过前面描述的控制器组合动作的效果,提高了汽车驶入和驶出弯道时的性能。
(6)由于集成了SOFAST逻辑,在换挡过程中最小化俯仰效果。
(7)避免使用横向加速度传感器, 相应地简化了电气接线,降低了系统故障率。
2.性能选择
驾驶员可选择最适合其驾驶风格的系统工作模式:正常/运动工作模式。系统在正常模式中以较柔性的减震器设置工作,在运动模式中以较刚性的设置工作。系统状态由仪表上的琥珀色警告灯“运动” 指示。正常/运动模式还作用在ASR和F1变速器系统上(如果有),将其设置为性能模式。任何系统故障将通过点亮仪表上的减震器系统警告灯进行指示。
3.Skyhook系统的部件
Skyhook系统的部件如图35所示。
4.电控单元
各种应用中使用的Skyhook CDC硬件保持不变。取决于工作模式,例如独立式(M138)或在CAN上(M139),汽车配线的连接引脚,所连接传感器的数量,以及输入变化的数量,如图36所示。
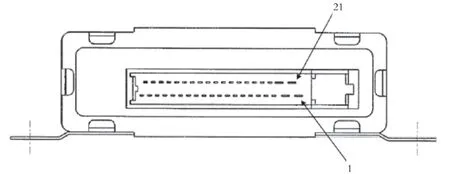
图36 连接器
完整电控单元引脚线,如表4所示。
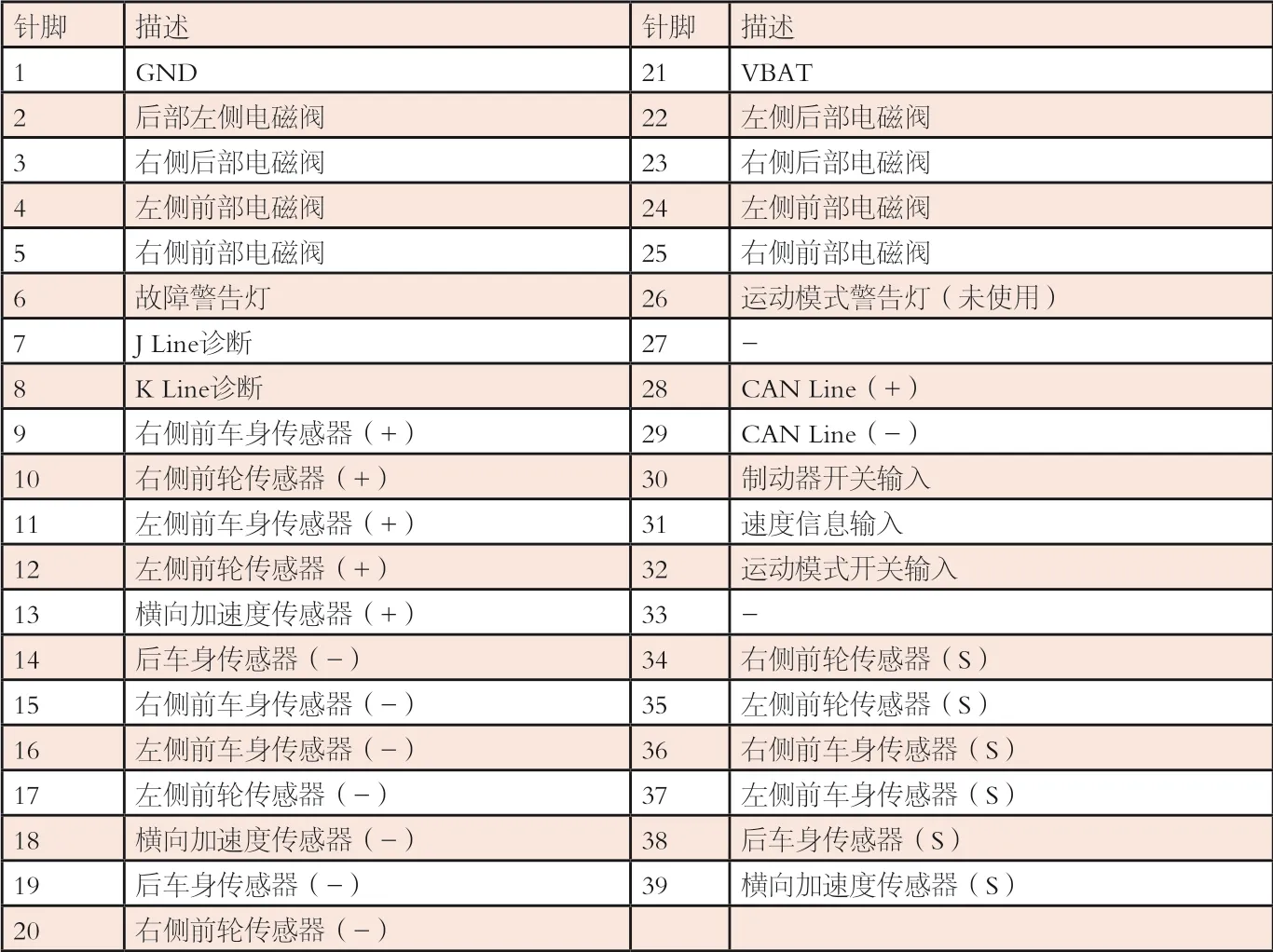
表4 电控单元引脚线说明
◆独立应用中未使用的元件用红色高亮显示
◆CAN 应用中未使用的元件用蓝色高亮显示
5.基本工作原理
基本工作原理如图37所示。
6.内部信号的计算
每隔10ms的10位采样测量的加速度值,用以确定汽车的各种加速度元素,从而获得车身、齿轮和减震器的速度,以及横向和纵向加速度。
7.阻尼力的计算
通过在不同应用基础上定制的校准参数,该算法决定作用在每个悬架上的力。
8.整定参数第1组
垂直、侧倾和俯仰加速度产生的阻尼力。
取决于速度的参数:
◆正垂直加速度
◆负垂直加速度
◆侧倾加速度
◆俯仰加速度
其他参数:
◆垂直加速度产生的前后力的分布
◆俯仰加速度产生的前后力的分布
◆侧倾加速度产生的前后力的分布
9.整定参数第2~3组
(1)横向加速度产生的阻尼力
◆横向加速度增益偏差
◆横向加速度偏差的退化时间
(2)车轮运动和横向加速度产生的阻尼力
取决于速度的参数:
◆横向加速度增益
取决于横向加速度的参数
◆车轮速度增益
10.电磁阀电流的计算
基于悬架响应曲线,电控单元计算传输至减震器的电流,从而获得所需响应,考虑该应用的典型阻尼曲线和驾驶模式设置。
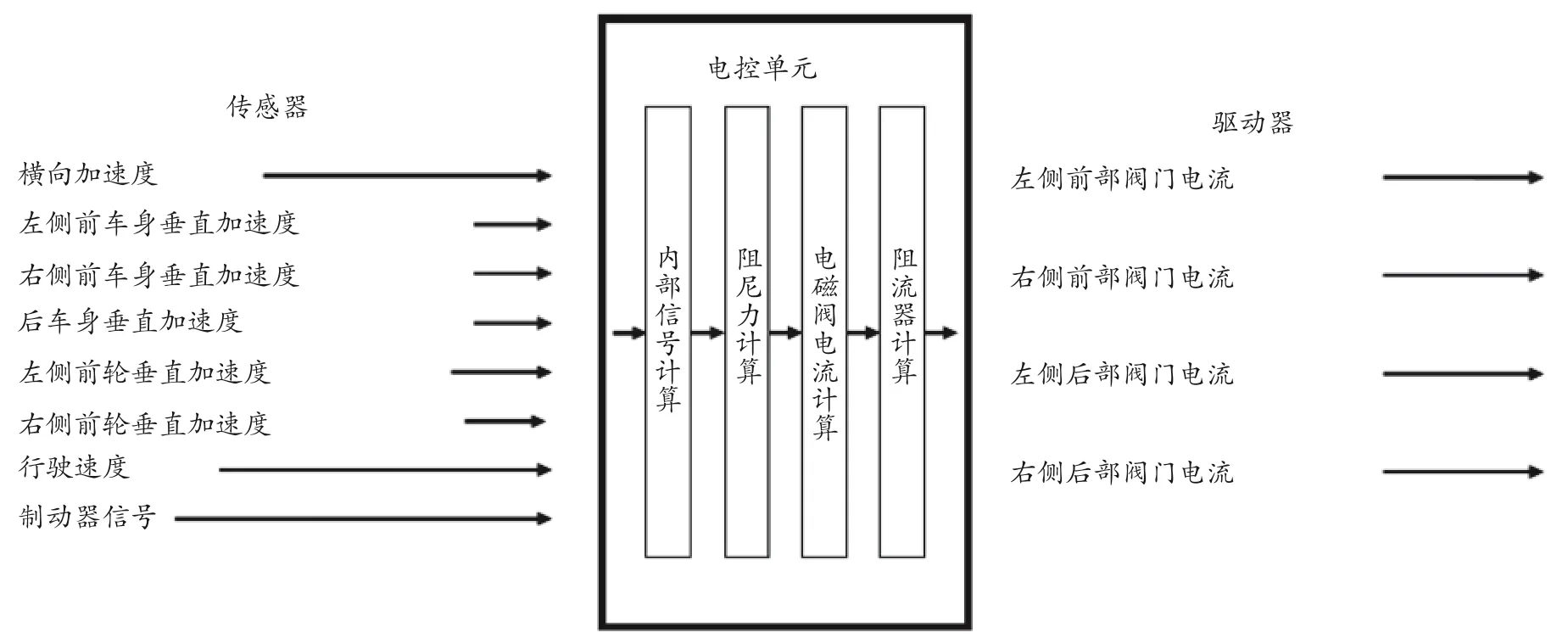
图37 Skyhook系统工作原理
11.整定参数第4组
减震器限制器的调节常数。
取决于速度的参数:
◆最小电流
取决于车身运动的参数:
◆正垂直加速度的系统反应增益
◆负垂直加速度的系统反应增益
◆侧倾加速度的系统反应增益
◆俯仰加速度的系统反应增益
取决于横向加速度偏差的参数:
◆横向加速度偏差的系统反应增益
取决于最小电流的参数:
◆前轴和后轴电流的关系
12.整定参数第5组
弹簧限制器的调节常数。
取决于横向加速度的参数:
◆横向加速度的系统反应增益
取决于路面的参数:
◆最大电流
其他参数:
◆路面效果值的过滤器
◆路面效果的退化时间
◆路面效果的最大值
◆制动反应的最小纵向加速度
◆制动反应的最大电流
13.加速度传感器
加速度传感器如图38所示。
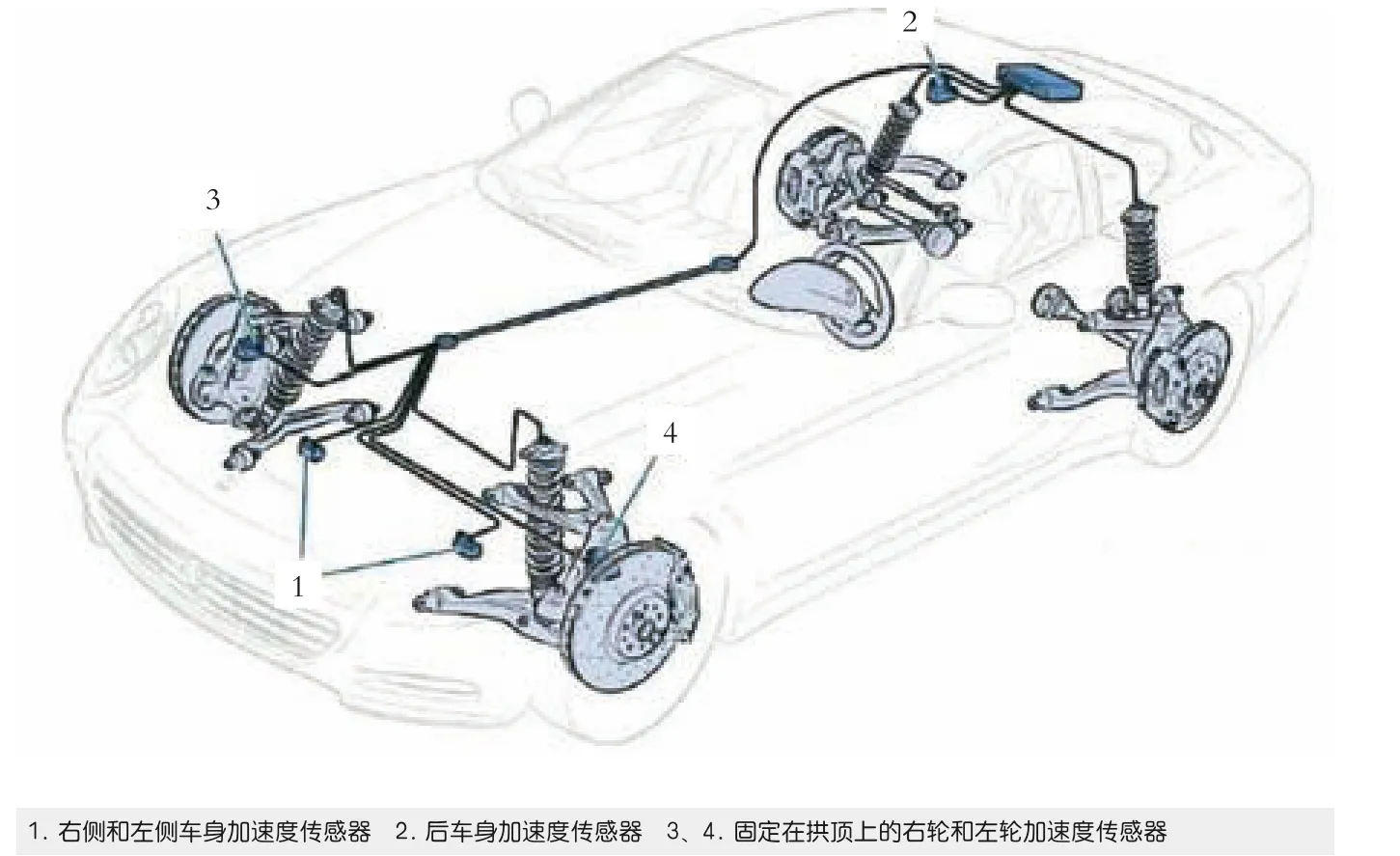
图38 加速度传感器位置
14.车身加速度传感器
这些传感器专门开发用于道路汽车的悬架控制。它们可以使用相同的元件测量汽车的车身加速度或横向加速度。这两种测量方法的唯一区别是传感器在汽车上的安装和偏差补偿。车身加速度传感器规格如表5所示。
15.车轮加速度传感器
这些传感器专门开发用于道路汽车的悬架控制。它们可以测量车轮加速度。车轮加速度传感器规格如表6所示。
16.传感器的安装
传感器的安装位置如图39所示。
17.传感器电源的连接
传感器由两个内部功率驱动器进行“成组”供电,这两个驱动器将电压从12V降至5V。如果组内出现一个传感器的电源问题,驱动器也将断开其他传感器的电源,如图40所示。
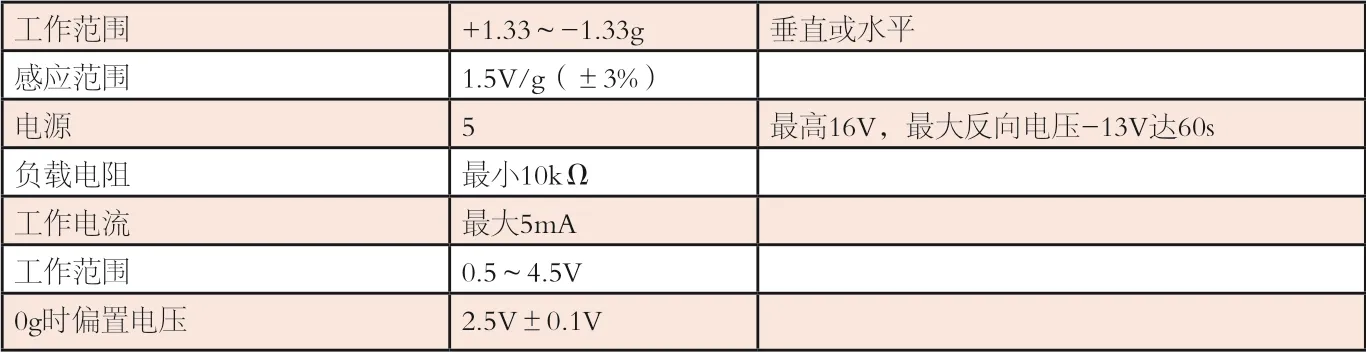
表5 车身加速度传感器规格

表6 车轮加速度传感器规格
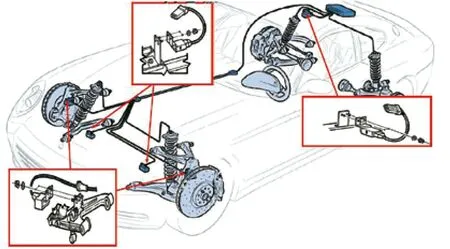
图39 传感器位置
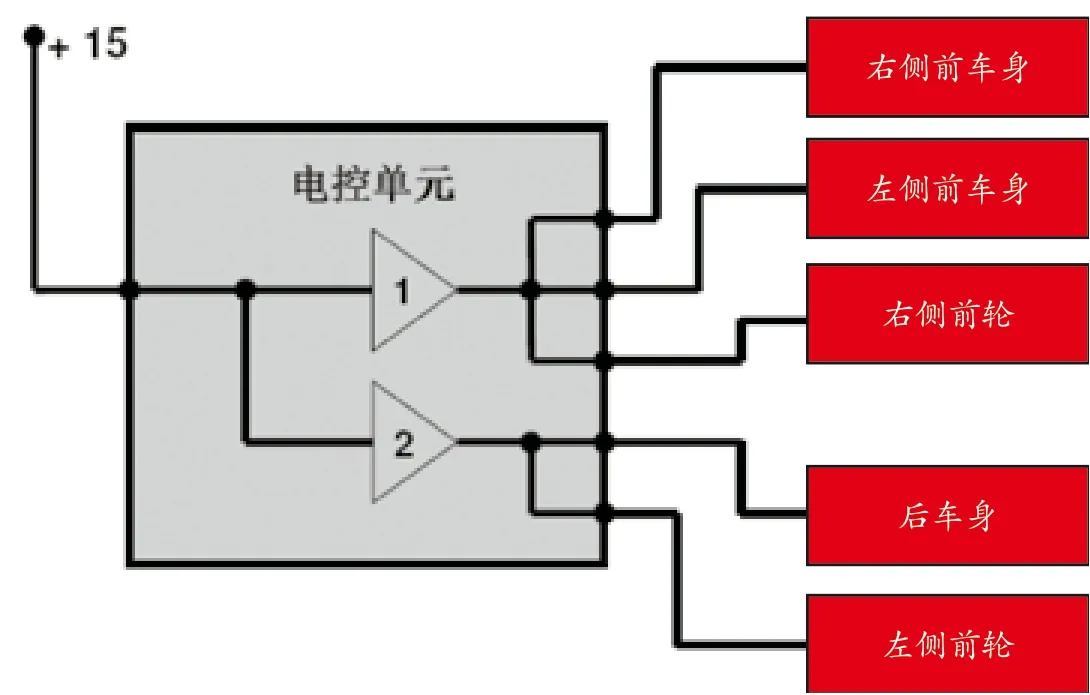
图40 传感器电源连接
18.传感器连接的诊断
(1)断开传感器
测量配线侧的信号针和接地针之间的电压:必须在4.75~5.25V之间。
测量配线侧的电源针和接地针之间的电压:必须在4.75~5.25V之间。
(2)断开电控单元
测量配线侧的信号针和电源针之间的电阻:必须超过50Ω。
19.减震器(带CDC阀)
所安装减震器配有CDC (连续阻尼控制)阀。电磁阀以常量电压(VBAT)供电,具有可变的PWM调制电流。电磁阀电流调节阻尼液流出的开口,从而确定减震器校准。减震器带CDC阀结构如图41所示,规格如表7所示。

图41 CDC阀结构
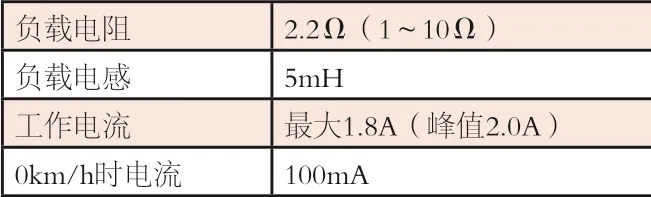
表7 CDC阀规格
20.诊断程序
首先执行的测试称为静态功能分析:在钥匙开启时,每个系统运行相关的自诊断循环。
当汽车连接至诊断测试仪时,电控单元可以指示许多可能的系统故障:
①电连接、电源或其他传感器故障。
②电连接、电源或其他电磁阀故障。
③电控单元自测过程中检测到的所有故障。
④所有CAN线路故障。
⑤所有电气配线故障。
钥匙开启后需要约12s进行每个故障的检测。还通过读取“参数”环境中的加速度参数,检查传感器是否安装正确。错误检测程序搜索每个可能的电气故障,但是无法检测装配或机械错误。因此,当静态测试已经通过时,必须以超过30km/h的时速对汽车进行道路测试,以激活对任何常量信号的合理性诊断循环。常量信号错误还会出现在滚筒试验台测试的过程中。这些测试代表临界状态,因为汽车不会如同在道路上那样摇晃。该阶段中的任何此类错误的检测均应忽略,如图42所示。

图42 故障提示
有些错误是系统无法正确诊断的:
◆安装了错误的传感器
◆传感器安装在错误的位置
◆传感器的机械松脱
◆悬架的机械问题
