2016年玛莎拉蒂Levante新技术剖析(十三)
2017-02-13王钟原
王钟原
(十二)全景系统
选配的全景影像系统使操控如Levante 车型较超大尺寸车辆更为简便安全。该系统由4 个相同的摄像头模块组成:
◆前部摄像头位于前格栅上,三叉戟边框的正上方
◆后部摄像头位于后牌照板的上方
◆两个侧面摄像头位于侧面后视镜的下部
全景影像摄像头模块技术规格如表93 所示。摄像头模块之一(左)与CVPM(右),如图112 所示。

表93 全景影像摄像头模块技术规格
系统由特定的模块管理(CVPM,中央视觉处理模块)。CVPM 位于地板饰板之下,右侧前排座椅下方,并执行以下操作:
◆为4 个摄像头模块供电,并接收每个摄像头模块的LVDS 类型信号(低压差分信号)。2 个功能均通过同一同轴电缆执行

图112 摄像头模块和CVPM位置
◆其结合4 个视频信号创建一个360°全景影像图像,可占据ETM 屏幕上所显示的全景影像框一半的位置
◆框的另一半则显示来自单独摄像头(前部或后部,根据挂入的挡位或用户手动选择)的信号
◆绘制并重叠动态操控线,基于当前转向角度在屏幕上追踪车轮轨迹
◆将合成的视频转换为模拟NTSC-M 格式,并传输给ETM 以便显示在中控台屏幕上
在拆除或更换过系统部件之后(CVPM 或任一摄像头),需要对全景功能的图像进行校准。可以通过MDEvo 测试仪启动校准程序,启动后需要几分钟行驶循环。
ETM 在专用页面上为驾驶员提供视频流。当挂入倒挡时,将自动打开页面,或是从“控件”(Controls)命令组中手动访问页面。出于安全性与可用性考虑,该系统仅可以非常低的速度启动,如图113 所示。
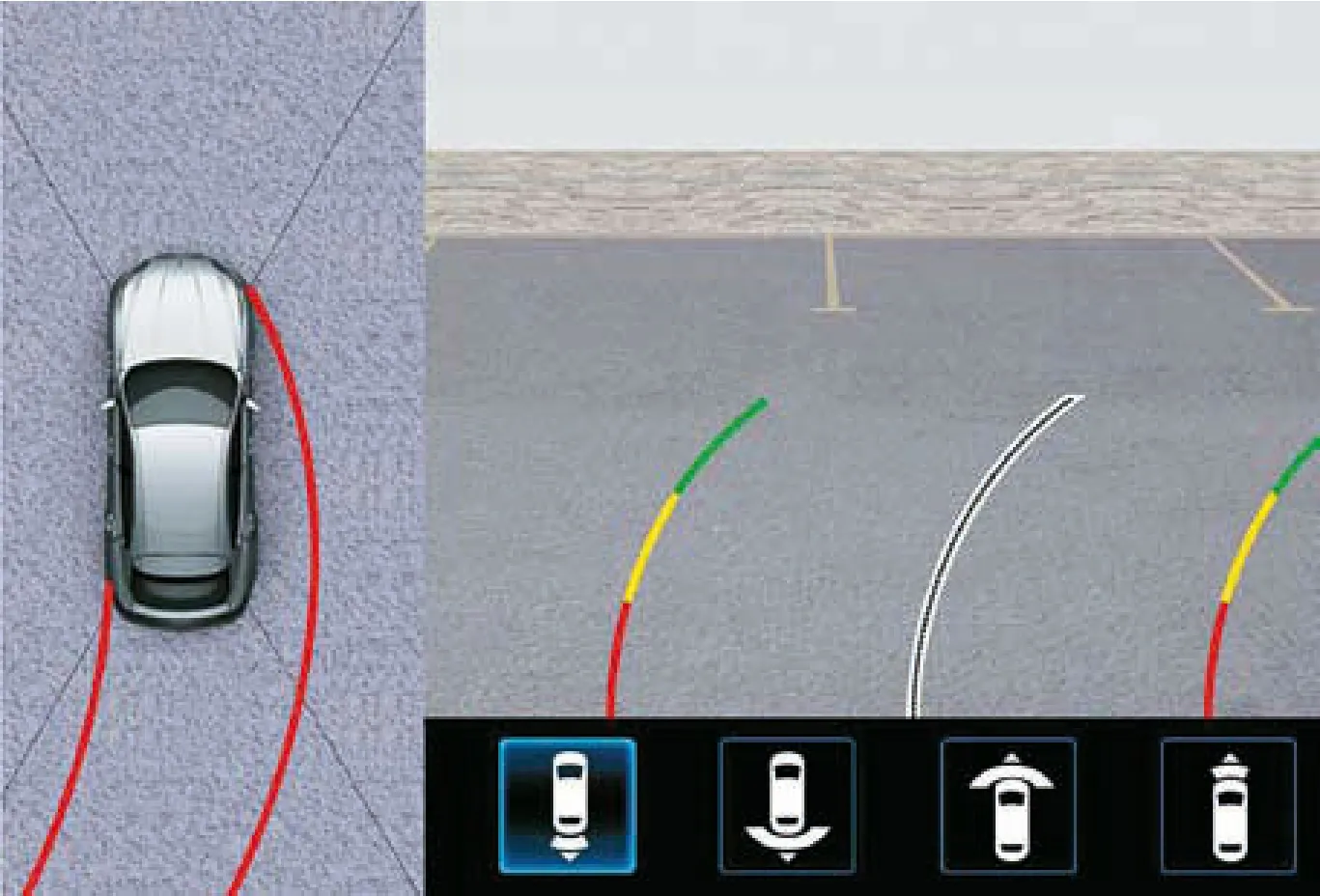
图113 页面
用户选择摄像头的输入命令将通过CAN I 总线从ETM 传输至CVPM,两者都同时与之连接。对于前部与后部影像摄像头,驾驶员可在两个影像角度之间选择:
◆带有动态线重叠的默认小角度在停车与狭窄空间中操控时非常实用
◆宽角度盲点影像,换句话说,将选定摄像头的全部视野缩放到屏幕上(差不多180°)。当驾驶员驾车通过视野受限路段时,这非常实用
独立式后视摄像头:
还可以仅配备后视摄像头(M156-7 车型已配备)来替代全景系统。在此情况中,该摄像头与全景摄像头不同,前者包含一个专用电子模块(RVCM,后视摄像头模块)。RVCM 会通过CVPM 使用的协议将视频流传送到同一引脚上的ETM。RVCM 还通过LIN 连接到BCM,来接收转向角输入并相应地覆盖其视频流上的动态驻车线。独立式后视摄像 头(RVCM)技术规格,如表94 所示。

表94 独立式后视摄像头技术规格
(十三)驻车传感器,车尾盲点监测系统与盲点检测
Levante 车型配备以下辅助系统(选配)。
1.驻车传感器
驻车传感器系统为选配配置,是沿用自M156-7 车型的配置。其使用超声波传感器进行检测,6 个在前保险杠上,4 个在后保险杠上,以及位于行李舱右侧饰板后的一个PTS(驻车电子系统)模块,如图114 所示。MTC+界面具有数个选项,用于设置警报的类型与音量、限制前部检测区域或是禁用系统。
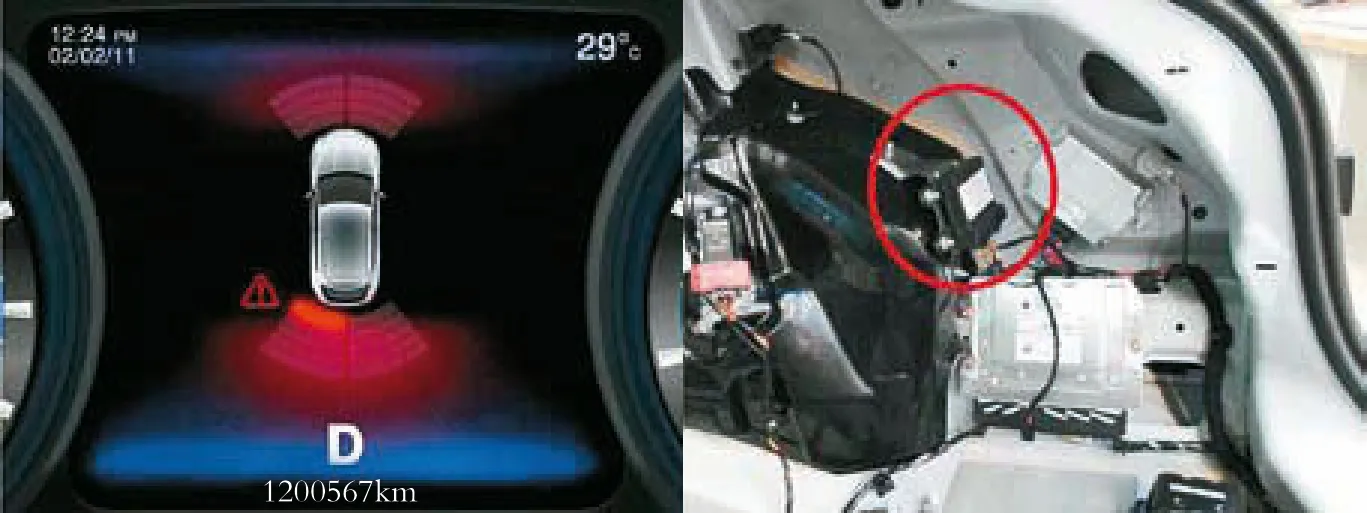
图114 MTC+界面和PTS模块位置
2.车尾盲点监测系统与盲点警报(如图115 所示)

图115 车尾盲点监测系统与盲点警报
配备沿用自MY16 Quattroporte车型与Ghibli 车型的RCP 和BSA 功能,可在以下情况中启用:
◆RCP:变速器为R 挡,同时速度在2 ~16km/h 之间
◆BSA:变速器为D 挡,同时速度超过10km/h。若在车尾盲点处检测到车辆,则将亮起同侧后视镜中的警报灯,如果驾驶员开启同侧转向灯,则同时发出声音警报
两个功能均由LBSS 和RBSS(左侧和右侧盲点传感器)管理,根据功能具有不同的车辆检测范围。电子模块连接到CAN I 并集成在位于后保险杠面板两侧角内的雷达传感器中,如图116 所示。

图116 雷达传感器位置
(十四)高级驾驶辅助系统(ADAS)
Levante 车型引入了数款尚未在玛莎拉蒂车型上使用的标志性高级驾驶辅助系统。以下将详细介绍这些系统的功能与操作原理。
1.自适应巡航控制(ACC)
自适应巡航控制同时提升常规巡航控制系统的舒适性与安全性,可根据前方车辆的速度对车速进行动态调节,而无须在每次需要改变车速时,都重置该系统。由位于前格栅三叉戟标志后的长距离雷达传感器测量目标车辆的车速与距离。系统所保持的距离,如图117 所示,由车速与用户的设置同时决定。
ACC 由DASM(驾驶员辅助系统模块)进行管理,DASM 可分析雷达信号然后通过CAN C 与ECM(常规巡航控制系统)和ESC 模块进行通信。在发动机制动不足以维持与前车的安全距离时,将主动对车辆施加制动力。当然,在两种情况下都会点亮制动灯,与踩下制动踏板的效果相同。
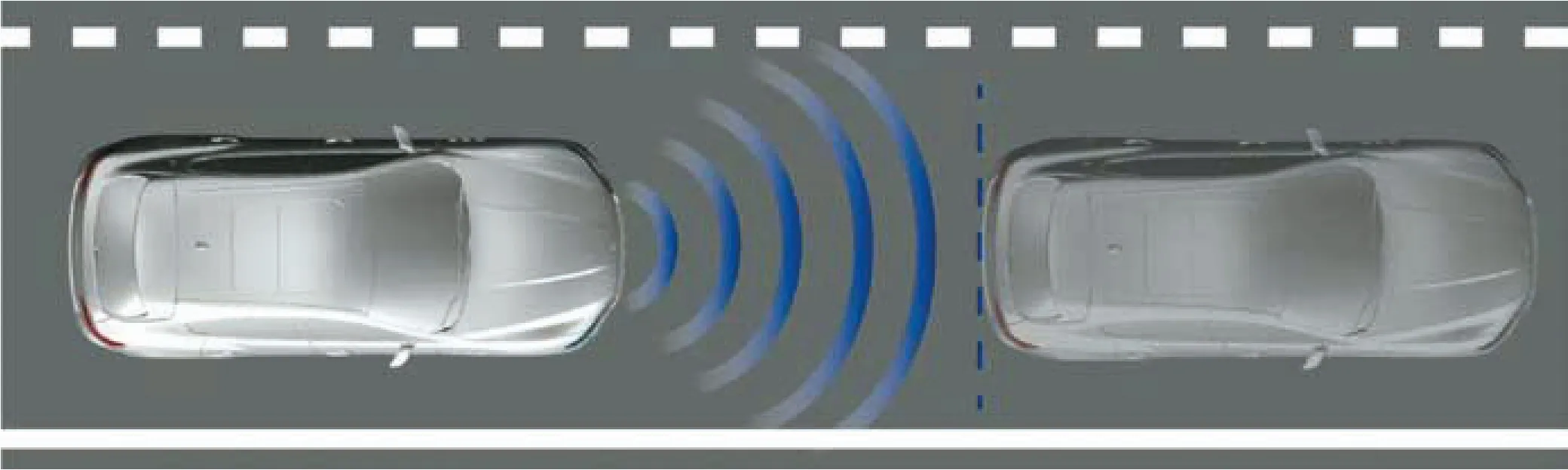
图117 测量目标车辆
ACC 根据以下逻辑工作:
◆可在速度高于30km/h 时启动
◆为保持不超过限速,就算在前车提速时,ACC 也不会将车速提高至超过驾驶员设置的速度。如果驾驶员需要保持跟随前车的状态,可使用转向盘上的常规摇臂开关手动提高设置速度
◆配备有自动停止功能,可持续跟随目标车辆直至它完全停止
◆如果目标车辆保持停止超过2s,则需要驾驶员介入方可再次启动(踩一下加速踏板或动一下速度控制摇杆开关)。保留之前的速度设置传统定速巡航控制系统仍然可用:按住距离设置按钮2s 可将其激活
2.前方碰撞警告(FCW)
前方碰撞警告是ACC 的安全相关扩展功能。使用相同方法(雷达与摄像头)来识别并准确定位车辆与其他障碍物,但其旨在避免(或至少是减轻)碰撞,以下为其工作方式:
◆通过音响系统与仪表向驾驶员发出声音与视觉警告
◆将以突然施加制动力的形式发出进一步的警告
◆如果驾驶员仍然未做出反应,而有很大可能即将要发生碰撞,则自动施加制动力以减轻碰撞后果
FCW始终与ACC同时装备。驾驶员可通过MTC+界面(设置页面)设置FCW 的灵敏度、禁用自动制动功能或关闭全部系统,如图118 所示。

图118 设置FCW
3.车道偏离警告(LDW,车道感应)
车道偏离警告是唯一只依赖摄像头模块(HALF)的ADAS 系统。如果仅配备了此系统,则不会安装雷达传感器。
在速度超过70km/h 时,摄像头模块识别车道分隔线,如果车辆无意中跨过了任一条线,则将向驾驶员发出声音与视觉警告,如图119 所示。为在无意的横向偏移与主动的变道之间做出区分,仅在以下情况中开启警报:
◆未开启同侧转向指示灯
◆车辆正以恒定速度巡航行驶(无明显加速或制动输入)
◆车辆逐渐跨过车道线,而驾驶员未在该方向有相应的转向盘动作
视觉警告由IPC 屏幕左上角的小图标构成。但是,在ADAS 专用页面上,可显示有关在程式化道路两侧所画线的更多详细信息:
◆灰线:系统无法检测道路上的车道标志,或是速度低于70km/h
◆白线:系统识别出车道标志并主动进行监控
◆黄线:系统警告驾驶员可能发生车道偏离
可从IPC 屏幕的此页面上关闭系统,但每次打开点火开关时系统都会自动重新启用。可从MTC+“设置”(Settings)菜单禁用警告声音。在IPC显示器上的ADAS 屏幕:ACC 可设置、启动并识别前方车辆。用户所设置的距离为最大距离,以四格的方式显示。LDW 启用并识别道路上的车道标志(白线),并且也警告驾驶员可能发生向左的车道偏离(黄线)。在指示器中重复提示的所有信息,将独立于当前启用的屏幕进行显示。 所有ADAS功能专为在常规公路上驾驶所设计和校准。因此,在选择越野模式后,将自动禁用它们,如图120 所示。
4.传感器与电子模块:DASM 和HALF
图121 左图:DASM(驾驶员辅助系统模块)集成于雷达传感器中,与ACC-FCW 选件一同装备于车辆。图121 右图:HALF 摄像头模块,始终与所有ADAS 选件一同装备(ACCFCW 和LDW)。

图119 识别车道分隔线

图120 IPC屏幕显示

图121 传感器与电子模块(DASM和HALF)位置
驾驶辅助系统主要由两个电子模块控制,模块集成于各自的传感器中:
◆DASM(驾驶员辅助系统模块)控制长距雷达传感器(位于前格栅上三叉戟边框后)。该模块集束发射高频(77GHz)射电波束,接收由固体表面返回的反射波,同时进行分析以评估前方车辆的位置与速度,以及车前方的其他障碍物。在最佳条件下,传感器可检测到250m 以外的车辆
◆HALF 模块(触觉车道反馈)控制前置摄像头(位于前风窗与后视镜之间)。主要用于LDW 系统,但同样在由DASM 执行的雷达测量确认中扮演重要角色。最后,HALF 模块同样协助执行来往车辆识别,用于自动调节大灯角度
在恶劣驾驶环境中ADAS 功能可能无法正常工作或被禁用,例如拥挤且混乱的交通状况、强降雨以及不规则的路面。此外,DASM 易受高电波反射环境影响,例如积雪、结冰或一些隧道的内衬层。
两个模块都连接到CAN C 总线,并借此与其他模块进行通信(主要为ECM、ESC 以及IPC),以操作ADAS 功能。两个模块也共用一条私有CAN 总线,用于交换、对比并确认有关每个模块所执行测量的所有信息。仅将由大量数据分析得出的最终结果(例如,驾驶员警告、发给ECM 和ESC 模块的命令)分享到CAN C 总线。为了正确和安全的操作,两个传感器前部的表面必须保持清洁。如果因灰尘或冰雪干扰了传感器的操作,则将在多功能显示器上显示特定警告信息。更具体地说,HALF 模块依靠雨刮器来保持前风窗上该部位的清洁,所以这两个部件的正确操作是紧密关联在一起的。
