一种采用霍尔传感器的永磁电机矢量控制
2017-02-11张璞汝张千帆宋双成陈爱棠
张璞汝,张千帆,宋双成,陈爱棠
(1.哈尔滨工业大学电气工程及自动化学院,哈尔滨150000;2.上海新时达电气股份有限公司,上海201802)
一种采用霍尔传感器的永磁电机矢量控制
张璞汝1,张千帆1,宋双成1,陈爱棠2
(1.哈尔滨工业大学电气工程及自动化学院,哈尔滨150000;2.上海新时达电气股份有限公司,上海201802)
给出了一种基于低精度霍尔传感器检测转子位置与转速的永磁电机矢量控制策略。通过利用霍尔传感器进行速度计算与角度估算的理论分析,运用零阶算法实现了速度计算与角度估算,并使用一阶算法进行改进;使用电阻进行电流采样。实验结果证明,应用改进算法可以获得正弦度更好的电流波形和电机启动能力。
永磁电机;矢量控制;霍尔传感器;电阻采样
随着永磁稀土材料技术的发展及电力电子技术的进步,永磁电机因其结构简单、功率密度大、效率高和易于出力等优点,被越来越多地应用在工业控制的各个领域[1]。根据电机运行过程中相电流波形不同,永磁电机存在正弦波驱动和方波驱动两种驱动方式,相比于方波驱动方式,采用正弦波驱动方式的控制系统有转矩脉动小、转速平稳等优点。
现有控制系统大多采用与电机转子同轴连接的高分辨率位置传感器,得到转子位置与速度信息,但这一类传感器对工作环境要求较高,与转子同轴连接增大电机体积并增加成本。由于霍尔传感器有安装简单、成本低、体积小且对工作环境抗性较高等优点,使用霍尔传感器检测转子位置与速度信息可以在保证电机良好运行性能前提下有效降低控制系统成本[2]。低速系统中,霍尔传感器相对于编码器优点主要为节约成本;高速系统中,由于编码器受限于机械转速以及分辨率等因素,霍尔传感器有着更好的优越性。因此,使用霍尔传感器检测转子位置与速度策略不仅适用于对成本敏感的低速控制系统,例如电动自行车控制器,而且适用于对系统机械强度要求较高的高速控制系统之中。
矢量控制中,电流环算法过程中需要得到电机相电流信息。电流检测方式主要有电流霍尔传感器检测和采样电阻检测。霍尔电流传感器可以保证较高的采样精度,并且其电气隔离性能优良,但是体积大、成本高[3,4]。为降低成本并缩小控制器的体积,采用在逆变桥下桥臂串联电阻的电流检测策略。
1 转速和位置估测
通过霍尔位置传感器进行速度计算和角度估算是一种兼顾成本和性能的方案,多采用开关型霍尔位置传感器。三相霍尔安装方式下,在一个电周期内霍尔传感器返回的信号只能提供6个准确的转子位置信息,分辨率较低。因此使用霍尔传感器检测转子位置信息的关键在于对传感器输出的霍尔开关信号进行处理,得到所需角度与速度信息。
1.1 转速计算和零阶角度估算方法
采用测取时间测速的方法是利用霍尔位置传感器返回信号进行速度计算。测取上一个霍尔区间的时间,计算转子转速,如果霍尔传感器采用相位差120°的安装方式,则转速计算公式为

式中:ω为转子角速度;Δt为转子转过120°所对应的时间。
如果不进行角度估算,三相霍尔安装方式下将一个电周期分为6个霍尔区间,区间交界处可以得到准确的角度信息。
根据电机电气时间常数远小于机械时间常数的特点,可认为电机在一个霍尔区间内做匀速旋转,这种情况下可以将前一个霍尔区间的转子速度作为现区间的转子速度,为了避免误差积累,在霍尔区间边界处对角度信息进行矫正[1,5]。零阶算法示意如图1所示。

图1 零阶算法示意Fig.1 sketch map of zero-order algorithm
图中,ωi-1为Scetor i-1区间中的平均速度;ti为进入区间 Scetor i的时刻;θi和 θi-1为区间的边界角,可以进行角度矫正。角度估算公式为
式中:θ为转子位置角度;Δt为区间中的运动时间。霍尔信号经过异或后会存在3个下降沿,在这3个下降沿处进行角度矫正。
数字模拟转换器DAC(digital to analog converter)输出的转角波形如图2所示。由图2(a)可以看出,未经处理的角度信息呈现阶梯状,平滑性比较差,严重影响了控制系统的性能。采用上述角度估算算法对角度进行3次矫正,效果见图2(b)。经过3次矫正,对比于只利用霍尔区间边界的6个准确位置获取转子位置信息,转角平滑性明显得到优化。

图2 处理前后转角波形Fig.2 Position information with and without processed
1.2 霍尔区间边界处线性矫正
角度突变和线性矩正示意如图3所示。图3(a)中,一个电周期内,在霍尔区间边界异或后下降沿处矫正发生时刻,角度存在畸变点。利用零阶算法所估算的角度与实际角度有所偏差,在霍尔边界矫正时,矫正为实际角度,造成角度突变。突变的角度使得双闭环控制过程中Park变换结果突变,电流环与速度环中的变量突变,造成电机控制系统性能下降。

图3 角度突变与线性矫正Fig.3 Angular sudden change and linear correction
为了消除突变,使用如图3(b)所示的线性矫正方案代替原来的直接矫正方案。这种情况下,速度将不再仅由上一区间的周期得到,而是和矫正时刻的转角误差与下一区间的边界角所决定。矫正时刻的转角误差将在下一个区间周期内被补偿,避免了转角的突变。
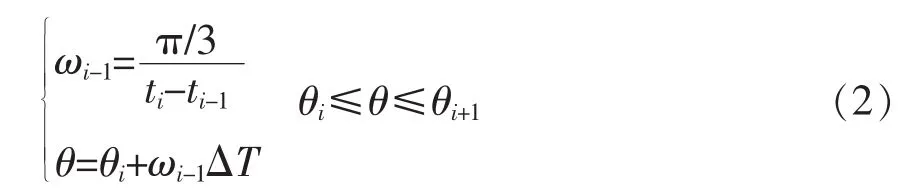
图4所示为3次矫正状态下直接矫正与线性矫正对电流的影响。由图可以直观地看出,使用线性矫正后相电流的正弦性度更好,电机运行时脉动减小,噪音减弱,性能得到了提高。此外通过观察角度波形可以发现,经过一系列处理,DAC输出的角度波形已经和理想角度波形接近,但实际还是存在角度估算不准的问题,因为DAC外部滤波的原因无法直观地看到。
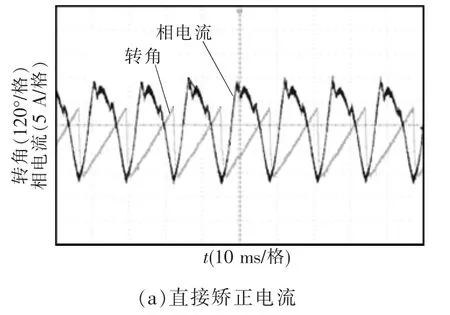

图4 线性矫正前后电流效果Fig.4 Current difference between direct correction and linear correction
1.3 6次矫正与角度估算一阶算法
电机空载启动,上述角度估算处理已经可以使得电机运行性能良好,但在电机负载情况下,相电流出现畸变,甚至无法正常启动。实验尝试过程中,通过充分利用三相霍尔信号异或后的6个边沿,包括3个下降沿与3个上升沿,进行角度矫正。改善电机启动性能,其电流对比如图5所示。
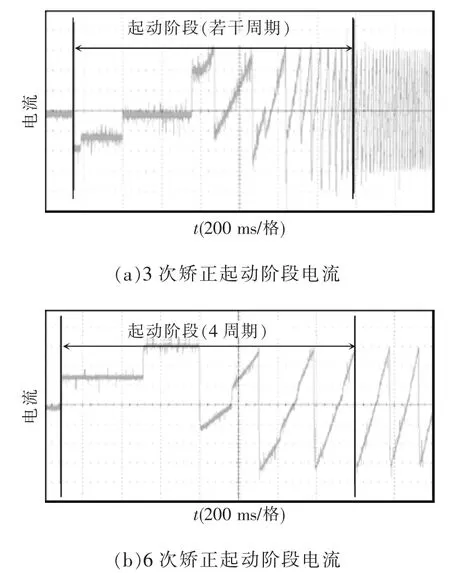
图5 3次矫正与6次矫正电流对比Fig.5 Current of three correction points and six correction points
图5中,电机在增加了3次矫正后,启动性能明显改善,进一步说明电机低速运转状态下角度估算的重要性。零阶算法中,将前一霍尔区间平均速度作为现霍尔区间速度,但是考虑到电机启动过程特性,电机转速短时间内上升较快,会造成角度估算不准确。此时引入转子加速度,使用一阶算法进行角度估算,可进一步提高估算精度[6]。角度估算一阶算法及效果如图6所示。
根据图5(a),一阶算法角度估算公式为
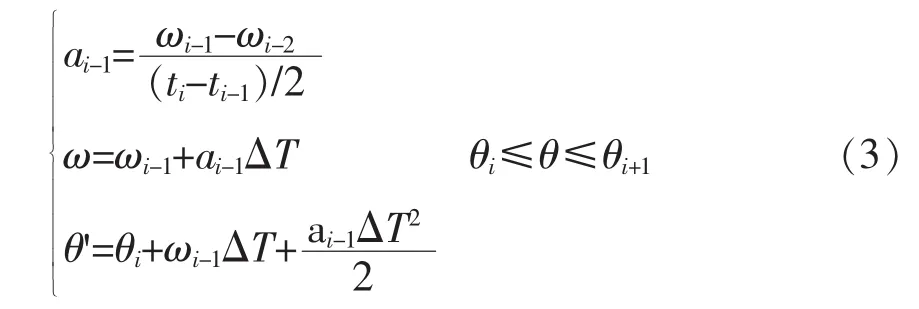
式中:ai和ωi分别为转子在第i霍尔区间的角加速度和平均角速度;ω为估测的转子实时角速度;θ'为估测的转子实时位置角度。使用一阶算法后,电机启动阶段电角度波形如图6(b)所示。由图可见,启动过程中由于引入了加速度,使得电机启动阶段时间缩短,2个周期后电机角度估算开始平稳,启动性能提高较为明显。

图6 角度估算一阶算法与效果Fig.6 First-order algorithm and results
2 三电阻绕组电流检测
在进行矢量控制过程中,需要电机绕组的电流信息。为了达到不同的控制目的,目前电机的拓扑结构也有些不同,例如为了进行六相电机容错控制,使用六相八桥臂作为拓扑结构;三相电机容错可以使用三相四桥臂容错方案[7]。在本文中为了降低成本,使用三电阻进行电流采样来替代霍尔电流传感器。
根据三相对称电流关系,有

同一时刻只需知道两相电流,即可计算出第三相电流。从节约成本角度考虑可以使用2个采样电阻,将电阻串联于下桥臂,必须在下桥臂导通时间内进行采样,并且下桥臂导通时间需大于换相产生电流扰动时间和ADC采样时间之和,以确保电流采样精度。但是,矢量控制中三相桥臂下桥臂导通时间总有一个最短,此时上桥臂开通时间决定了脉宽调制PWM(pulse width modulation)调制比的大小。因此下桥臂导通时间的要求限制了上桥臂的开通时间,降低了调制比。为提高调制比,使用三电阻采样策略,但同一时间只采集下桥臂开通时间较长的两相电流信息。电流采样拓扑与策略如图7所示。可以根据不同的扇区,选择下桥臂导通时间较长的两相进行电流采样。例如在第5扇区,驱动信号为反逻辑,当为高电平下时下桥臂开通,此时A相和B相下桥臂导通时间较长,对这两相进行电流采样,驱动波形如图7(b)所示。
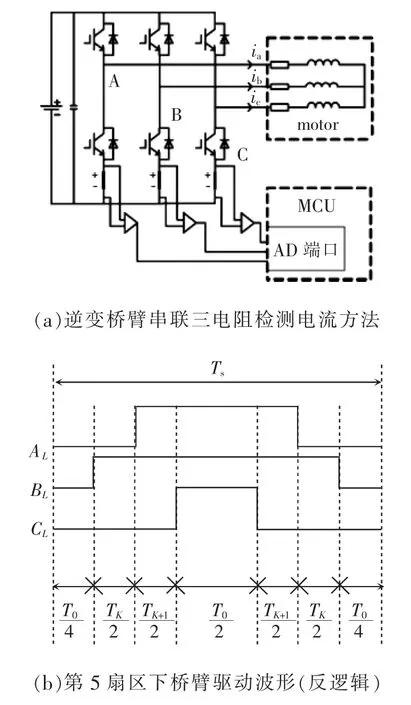
图7 电流采样拓扑与策略Fig.7 Current sampling topology and strategy
当三相电流不对称,式(4)将不再适用,此时需要采取三相电流进行计算,根据拓扑结构,需要延长图7(b)情况下C相的下桥臂导通时间以保证采样的准确性,此时调制比下降,母线电压利用率降低。
3 实验验证
在完成软件与硬件设计基础上,对上述策略进行实验验证。实验平台如图8所示,整体结构为两电机对拖。所设计控制器采用转速控制,控制平台左侧永磁轮毂电机,与轮毂电机同轴相连的感应伺服电机由变频器驱动,采用转矩控制,作为轮毂电机负载。

图8 实验平台Fig.8 Experimental platform
图9所示为负载转矩33 N·m时电机的相电流与DAC输出的q轴电流波形,此时相电流的正弦度良好,反映出电机运行状态平稳,转矩脉动较小,性能良好。

图9 电机相电流与q轴电流iFig.9 Shunt current and iq
为进一步了解电流中的谐波含量,对电流进行总谐波失真THD的测量,同时,在负载25 N·m、稳定运行速度400 r/min时对电机带载启动性能进行测试,测试结果如图10所示。

图10 性能测试波形Fig.10 Performance result
由图10(a)可见,电流总谐波含量为2.6%,谐波含量较少。由图10(b)可见,电机启动经过电流建立、升速、超调调整和稳定运行4个阶段,在2个周期内完成电流建立,电机升速,在阶段Ⅲ,转速超调得到调整,最后电机平稳运行。由于转速经过DAC输出滤波,超调图中未呈现。
转矩突变情况下以及存在转矩扰动情况下,实验测试了电机运行过程中的动态性能。如图10(c)所示,转矩突变的情况下,在200 ms时间内,电流完成上升并到达稳态的过程。
在电机稳态运行过程中,人为对电机增加转矩扰动,如图10(d)所示。在转矩存在波动的情况下,控制器在35 ms左右作出了相应的反应并达到稳态继续运行。图10(c)与(d)显示出使用霍尔传感器检测转子位置与速度信息的方法,经过算法优化,可以使得系统有着较好的动态响应性能。
4 结语
本文给出了利用霍尔传感器估测转子角度与速度信息、利用三电阻进行绕组电流采样的永磁电机矢量控制。采用优化转子位置角估测算法,提高了电机电流正弦度,电流总谐波含量可达2.6%。最后对控制系统进行了实验测试,性能良好。
[1]唐丽婵,齐亮.永磁同步电机的应用现状与发展趋势[J].装备机械,2011(1):7-12. Tang Lichan,Qi Liang.PMSM application and development[J].Equipment Machinery,2011(1):7-12(in Chinese).
[2]Xie En,Liu Weiguo,Huangfu Yigeng,et al.Research on determining the locations of BLDCM hall sensors according to rotor flux-oriented[C].Mechanical and Electrical Technology(ICMET),2010 2nd International Conference on,2010: 113-116.
[3]Carpaneto M,Marchesoni M,Parodi G.A sensorless PMSM drive operating in the field weakening region using only one current sensor[C].Industrial Electronics(ISIE),2010 IEEE International Symposium on.2010:1199-1204
[4]谭博,刘卫国,马瑞卿,等.基于相电流的航空无刷直流电机电流闭环研究[J].微电机,2011,44(3):63-67. Tan Bo,Liu Weiguo,Ma Ruiqing,et al.Aeronautical BLDC shunt current closed loop control[J].Micromotor,2011,44(3):63-67(in Chinese).
[5]Capponi F G,De Donato G,Del Ferraro L,et al.AC brushless drive with low-resolution hall-effect sensors for surface-mounted PM machines[J].Industry Applications, IEEE Transactions on,2006,42(2):526-535.
[6]Bu Jianrong,Xu Longya,Sebastian T,et al.Near-zero speed performance enhancement of PM synchronous machines assisted by low-cost hall effect sensors[C].Applied Power Electronics Conference and Exposition,1998.APEC '98 Conference Proceedings 1998,Thirteenth Annual,1998,(61):64-68.
[7]佟诚德,许兵,程路明,等.采用六相八桥臂变流器永磁同步电机系统的驱动及容错控制仿真研究[J].电源学报,2016,14(5):15-23. Tong Chengde,Xu Bing,Cheng Luming,et al.Simulation of DTP-PMSM drive and fault-tolerant control system based on six-phase eight-leg VSI[J].Journal of Power Supply,2016,14(5):16-23(in Chinese).
Permanent Magnet Motor Vector Control Using Hall Effect Position Sensor
ZHANG Puru1,ZHANG Qianfan1,SONG Shuangcheng1,CHEN Aitang2
(1.School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin 150000,China; 2.Shanghai STEP Electric Corporation,Shanghai 201802,China)
A permanent magnet motor vector control strategy is designed using a low-precision Hall effect position sensor to get speed and angle of the rotor.A method of computing rotor speed and angle based on Hall effect position sensors is analyzed.Three resistances are used to detect winding current.Experiment results show that good sinusoidal current waveform and startup performance are realized by the improved algorithm.
permanent magnet motor;vector control;Hall sensor;sample current with resistance

张璞汝
张璞汝(1992-),男,硕士研究生,研究方向:电力电子技术与电机控制,E-mail:qdzhangpr@163.com。
张千帆(1974-),男,通信作者,博士,教授,研究方向:电力电子技术,E-mail:zhang_qianfan@hit.edu.cn。
宋双成(1992-),男,博士研究生,研究方向:无限电能传输,E-mail:song_sc @126.com。
陈爱棠(1990-),男,硕士,工程师,研究方向:电机驱动与控制,E-mail:chenaitang@126.com。
10.13234/j.issn.2095-2805.2017.1.81
:TM 341
:A
2015-12-17
国家自然科学基金资助项目(51177027,513611 30153)
Project Supported by National Natural Science Foundation of China(51177027,51361130153)
