基于ATMEGA128单片机的磁路互补型模块化磁通切换永磁同步直线电机空间矢量控制
2017-02-11孔龙涛张邦富
程 明,孔龙涛,张邦富
(东南大学电气工程学院,南京210096)
基于ATMEGA128单片机的磁路互补型模块化磁通切换永磁同步直线电机空间矢量控制
程 明,孔龙涛,张邦富
(东南大学电气工程学院,南京210096)
为实现一种低成本的新型磁路互补型模块化磁通切换永磁同步直线电机(MLFSPM电机)控制,提出了采用ATMEGA128单片机作为控制系统核心的方法。对MLFSPM电机的结构特点和模型进行分析,介绍了查表SVPWM的原理,搭建基于ATMEGA128单片机为核心的控制系统,实现电机的调速和往复运动。实验结果表明,以单片机为核心,采用查表SVPWM控制方法的系统调速性能优越,运行稳定。
MLFSPM;单片机;电机控制;查表SVPWM
虽然永磁同步直线电机在力能指标、效率、功率因数等方面具有明显的优势,但是传统永磁直线电机的绕组和永磁体分别放置在电机的初级和次级,在长定子应用场合大大增加工程成本,且容易出现故障,维护不便。文献[1]提出了一种新型磁路互补型模块化磁通切换永磁同步直线电机MLFSPM(modularized flux-switching permanent magnet linear machine with complementary magnetic circuits),其永磁体和绕组安装在初级短动子上,应用在轨道交通等长定子的场合,可大大降低系统成本。针对传统LFSPM电机的反电动势不对称、谐波含量大、定位力大等缺点,MLFSPM电机同相绕组不同线圈的反电势能相互削弱谐波,使合成的反电动势正弦度高,同时使三相模块各自的定位力在空间相差120°,使合成的定位力最小。
尽管DSP芯片功能强大[2],处理速度快,但其价格昂贵。从节省成本和满足工程需求出发,本文选择一款价格低廉的ATMEGA128单片机作为核心芯片。为了配合单片机有限的处理速度和外设资源,需要选择一种对控制芯片要求较低的算法。文献[3]中推导出了空间矢量脉宽调制SVPWM(space vector pulse width modulation)调制出的电压公式,但并没有进一步说明如何简捷的实现该算法;文献[4]中虽然说明了SVPWM调制的电压如何在查表模式下实现,但并没有说明如何将其应用在电机控制中;文献[5]将其应用在基于DSP的永磁同步电机控制系统,且没有具体分析系统的工作原理和调制出电压矢量角度和转矩的关系。
本文以MLFSPM电机为研究对象,在分析MLFSPM电机结构、工作原理和数学模型的基础上,研究和分析查表实现空间电压矢量控制的原理和方法,搭建了基于ATMEGA128单片机的MLFSPM电机控制系统,实现了MLFSPM电机的速度调节和往复运动,验证了系统的稳定性和可行性。
1 MLFSPM电机结构与模型
MLFSPM电机的结构原理如图1所示,图中MLFSPM电机由6个“E”模块和非导磁材料组成。每个E模块由2个U型铁芯以及所夹的永磁体组成,如图2所示。电机相邻两个模块中永磁体交替充磁,模块之间用磁障隔开;A相绕组由2个相邻的A1和A2绕组串联构成,同理B1、B2构成B相,C1、C2构成C相。属于同一相的2个“E”型模块的距离为λ1=(n±1/2)τs,其中n为正整数,τs为定子极距,此种结构使得每相的2个绕组磁链互补。
由于每一相的相邻2个模块磁路互补,可以使两线圈反电动势中的偶次谐波分量相互削弱,使相电势更加接近正弦波。又因该电机属于同一相的相邻2个E模块,相对定子位移彼此相差180°电角度,相邻相对应E型模块相对定子位移相差120°电角度,这样使三相E型模块定位有很好的对称性,能够彼此抵消[1]。
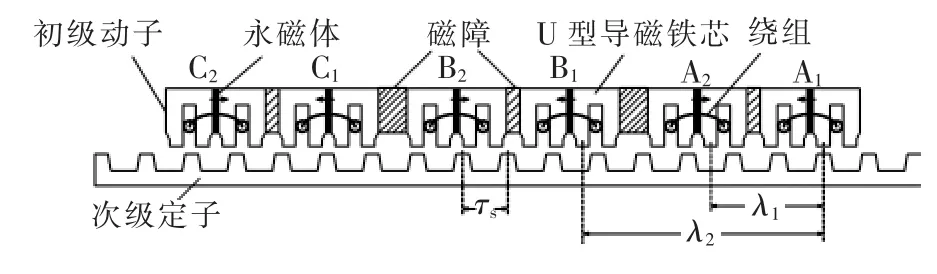
图1 磁通切换永磁直线电机结构Fig.1 Structure of flux switching PM linear machine
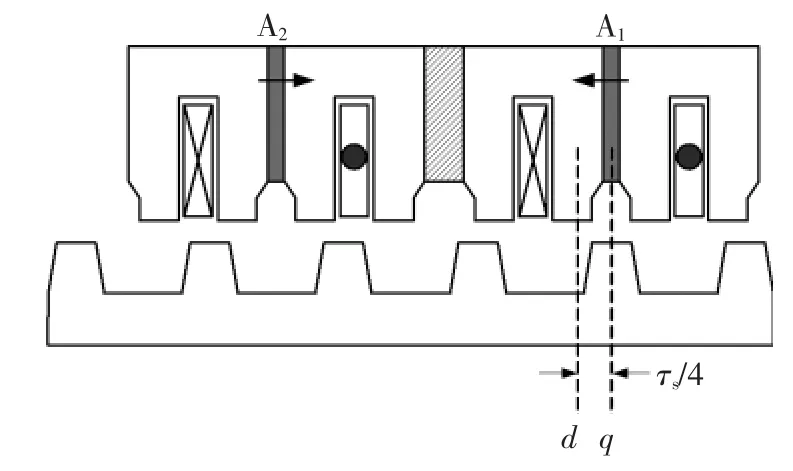
图2 MLFSPM电机“E”模块Fig.2 E-module of MLFSPM machine
2 MLFSPM电机数学模型
本节给出MLFSPM电机的d-q坐标系下模型。在建立数学模型时,基于如下假设:忽略铁芯饱和,不计涡流磁滞损耗;永磁材料电导率为0;电机电流为三相对称电流。
定义d-q轴是研究MLFSPM电机旋转坐标系下数学模型的关键,本文定义d轴为动子所在磁链的最大位置,q轴为动子所处磁链为0的位置[6],如图1所示。
电机d-q轴电压方程表达式为

电机d-q轴下的磁链方程表达式为

电机的输出推力为

式中:ud、uq、id、iq和ψd、ψq分别为d、q轴电压、电流和磁链;R为绕组电阻;ωe为电角频率,ωe=2πv/τs;v为电机速度;ψmd等于永磁磁链峰值,Ld、Lq、Ldq、Lqd分别为d、q轴下的同步电感。
3 控制方法
交流电机的控制需要对位置信号进行处理,需要PARK变换和一系列的三角函数运算,因此需要处理速度快,外设充足,有Qep编码电路等外设的芯片,一般满足这种要求的芯片价格昂贵。本文选择一款ATMEL公司稳定性高、价格低廉的8位微处理器ATMEGA128。通过合适的算法、合理的分配资源来弥补其外设不足和处理速度较慢的缺陷,使系统达到要求。
3.1 查表SVPWM算法
SVPWM控制算法的思想是当三相交流电机通入对称的三相电时,会产生圆形旋转磁场,进而产生恒定的转矩,因此通过控制逆变器的开关,交替使用不同的电压空间矢量来合成理想电压矢量,逼近圆形旋转磁场。其理论基础为在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。因此对于一个磁通切换交流电机SVPWM控制系统来说,通常包括:扇区判断,基本电压空间矢量选择、计算等效时间和产生脉宽调制PWM(pulse width modulation)波[7],每个过程都需要进行大量的乘法、除法以及三角函数运算,对处理器要求较高。因此找出SVPWM波的隐含调制波,将所求的调制波形离散成数据表,就可以像正弦脉宽调制SPWM(sinusoidal pulse width modulation)那样直接查表,使得算法大大简化,便于数字化的实现。
从SVPWM的理论基础出发,推导出逆变器输出端A相对于直流端点O的位于不同扇区的电压UAO,得到相电压调制函数[4]为
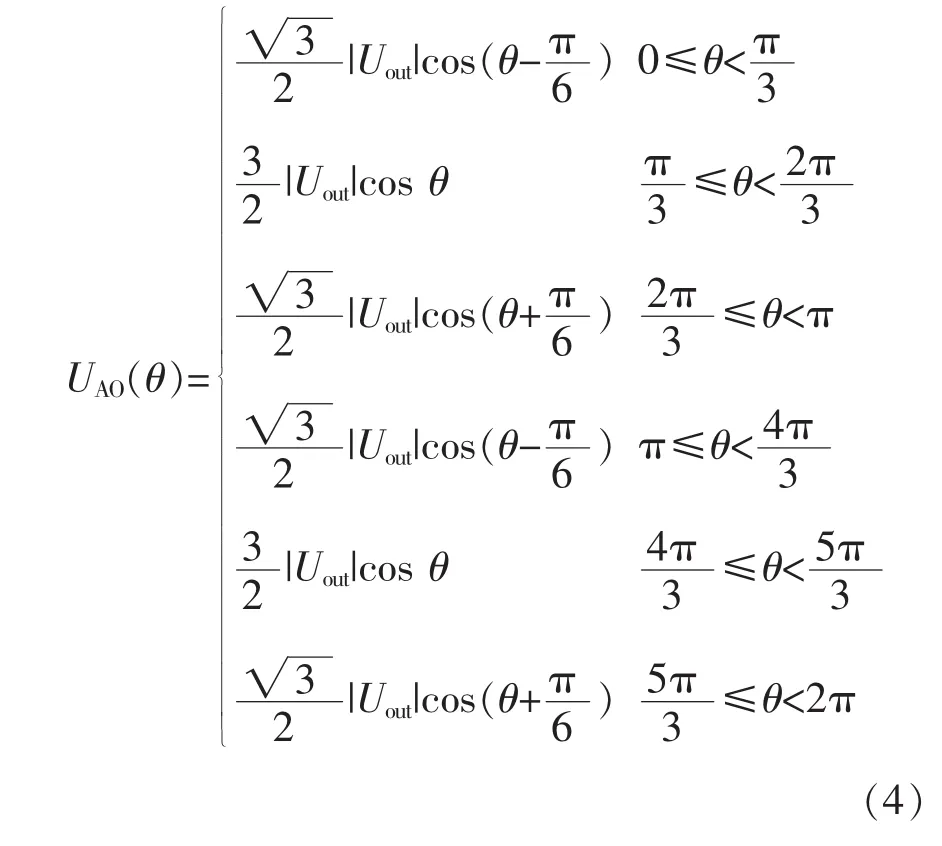
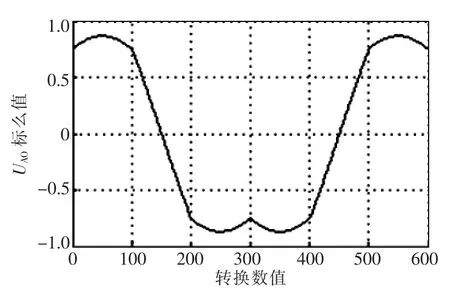
图3 UAO函数图像Fig.3 Function image of UAO
根据UAO的一个周期内的函数图像,并将该图离散成600个点,如图3所示,将这600个数据存为数组cos_table[600],供查表使用。
电机的转矩跟永磁体产生的ψm和电枢磁链ψs夹角的正弦成正比关系。其中,ψs可表示为

从式(5)可以看出,在忽略电阻的情况下,ψs矢量滞后合成电压矢量90°,其向量如图4所示。
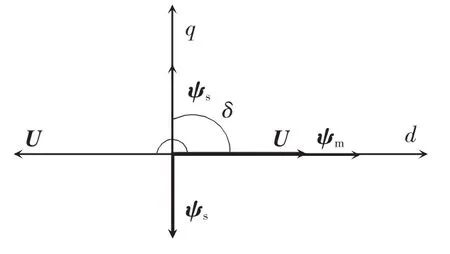
图4 MLFSPM电机向量Fig.4 Vector of MLFSPM machine
在对MLFSPM电机进行控制时,首先需要确定永磁体磁链的位置,通常是给三相逆变器(100)的信号,使永磁磁链与d轴重合;当得到永磁磁链位置后需要确定电压矢量的初始角度。给定电压矢量初始角度的原则为:使永磁体磁链与电枢磁链之间的夹角为90°,产生的电磁转矩最大。因此在查表时电压矢量的初始角度180°,即从零时刻开始电压矢量的初始角度是180°。进行查表时将角度转化为数值,因此需要将θ转化为

为了使三相电压对称,B相当于将UAO滞后2π/3,因此需要在θ的基础上加400,再按该数值进行查表。同理,C相在B相查表数值的基础上再加上400即可,分别表示为
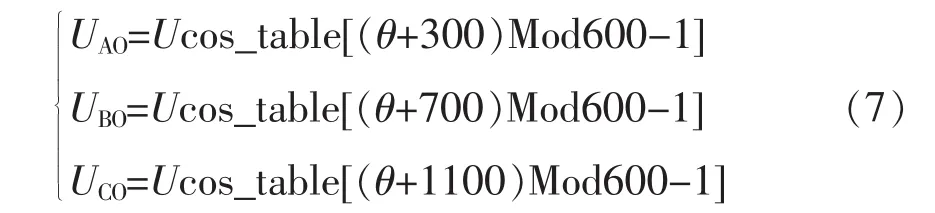
图5所示为电机运动时位置曲线,假设在t1时刻,电机进行反向运动。由于单片机对脉冲的计数器为递增计数,此时如果计数器的值继续查表,将会导致电机位置不准确,运行性能下降,因此需要对此时电机的位置信号进行处理。
图6所示为电机正反转时查表方向。t1时刻电机位置θ1=250,此后θ应该递减变化,范围应该为250~0,如图6中箭头所示;由于单片机对脉冲的计数值θ从250开始递增且周期值为600。为让系统按照250~0的范围查表,需要将 θ按照θ=600-2(300-θ1)-θ+600进行处理。按处理后的值查表图形和按箭头方向查表的波形一致。

图5 位置曲线Fig.5 Position curve

图6 正反转查表方向Fig.6 Direction of look-up table for forward and reverse motion
为了使电机能够产生负的转矩,因此需要将ψs矢量滞后ψm电角度90°,即将电压矢量反向,因此除了注意以上角度的变换之外,还需要将改变之后的θ减去300,如图4粗线矢量所示。
综上所述,当某一时刻电机反向运动时,将角度θ1按照θ=600-2(300-θ1)-θ-300+600进行处理,再在系统中按照处理后的角度θ代入查表公式(10)进行查表即可。如果系统是由反向运动到正向运动,直接按式(6)中求得θ值查表即可。
3.2 控制系统结构
图7为控制系统结构。该控制系统结构简单,只有一个速度PI环。电机运行时,直线光栅尺会产生方波,通过对脉冲的计数就可以算出电机的相对位置。本文涉及的MLFSPM电机定子极距为36 mm,且一个定子极距对应360°电角度,电机每运动一个极距所产生的脉冲数为9 000个,因此可以根据单位时间内计数的脉冲数计算出速度,根据计数的总脉冲可以计算出电机的相对位置。给定速度与电机的实际速度经过PI调节得到电压幅值,且系统可根据实时的位置信号来查表。将PI调节值与查表值相乘得到所需的电压波形,然后转化成PWM波送入三相逆变器。
进一步分析可知,速度PI调节得到的电压幅值控制的是电枢磁链的幅值,由于电枢磁链与永磁体磁链之间的夹角δ是给定的,因此调节电枢磁链的幅值即可达到调节转矩的目的。而PI调节得到的电压幅值与查表值相乘得到系统所需的电压波形,即调制波。系统采用5 kHz的载波与电压波形进行调制产生三相PWM波,并将其送入三相逆变器对电机进行控制。本文所述电机控制系统三相逆变器直流测的电压为60 V。
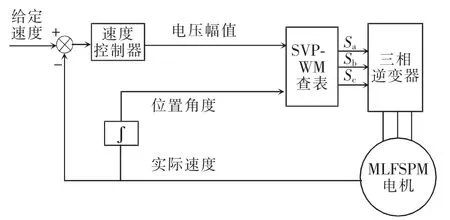
图7 系统控制结构Fig.7 System control structure
3.3 软件结构
电机控制系统的主程序结构如图8所示。
系统初始化包括PWM模式初始化、16位计数器初始化、中断初始化、定时器初始化。在PWM模式初始化中,采用相位修整PWM模式,频率为5kHz。采用此模式可以产生3路有较好对称性的PWM波。由于这种模式是5 kHz的三角波与设定的一个数值进行比较来产生高低电平,这样可以根据系统调节出的电压波形来改变PWM波的占空比,控制三相逆变器。计数器初始值设置为0,计数模式为增计数且允许溢出中断。定时器设置2 ms定时,允许定时中断。中断初始化中将所有中断标志位清零,并将系统总中断打开。
当系统有中断发生时,如果是定时中断,则在定时中断函数中进行速度和位置的计算,然后进行PI计算并根据计算的位置和PI调节的参数进行查表,进而产生三相PWM波。产生的三相PWM波由硬件电路依次取反,产生6路PWM波,送入三相逆变器。如果系统进入的是计数溢出中断,则证明计数达到了65 535,在溢出中断函数内将计数值加1。
如果需要电机进行变速运行时,可以在定时中断中改变速度给定值。假如需要在t1时刻改变速度,则当定时器达到t1/2时改变给定速度;系统也可以在运行到某一段距离之后改变速度,如在位移S=1 m时改变速度,则在定时中断中检测计数值,当计数值等于(S×1 000/36)×9 000时改变速度。
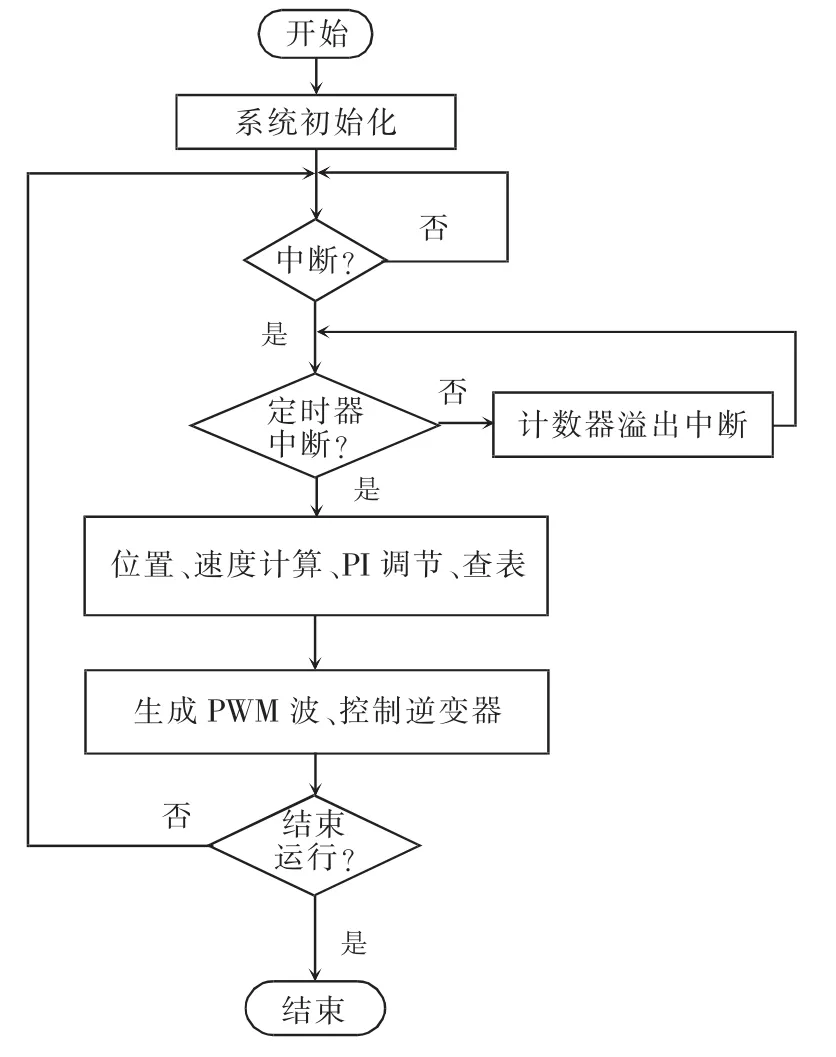
图8 软件结构Fig.8 Software structure
4 实验研究
MLFSPM实验样机的参数为:定子极距 36 mm,气隙为2 mm,额定电流6 A,额定速度为1.5 m/s,每相电阻1.6 Ω。由于实验室样机的导轨长度为2 m,因此实验中电机的运行速度在-0.5~0.5 m/s之间变动,这样电机运行整个导轨距离的时间在10 s左右,利于对系统调速性能的观察。
实验分别对MLFSPM电机控制系统的正向调速性能、反向调速性能、正反向调速性能进行了验证。图9为电机从0.4 m/s骤降到0.2 m/s的速度响应和电流波形;图10为电机给定速度为-0.4 m/s骤升到-0.2 m/s时电机的速度响应和电流波形;图11为电机给定速度从0.3 m/s骤降到-0.3 m/s的速度响应和电流波形。
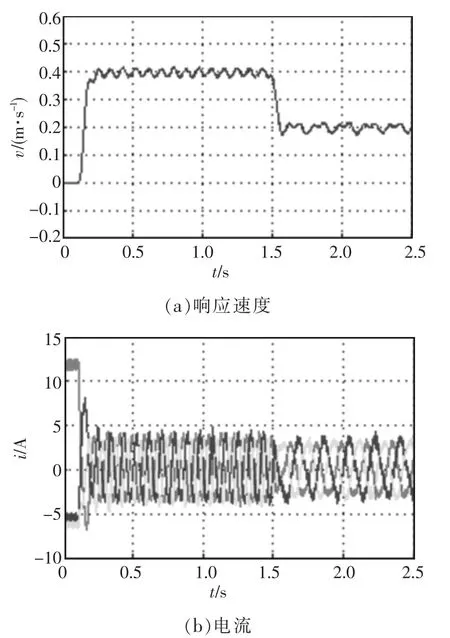
图9 0.4降到0.2 m/s速度响应和电流波形Fig.9 Speed and current responses with the speed changing from 0.4 to 0.2 m/s
从图9和图10速度响应波形和电流波形可以看出,电机三相电流具有较高的正弦度。电机启动和给定速度突变时,实际速度能迅速跟踪给定值且无超调。对比图9和图11可以看出,当电机进行往复运动时,速度可以更加快速地跟踪给定值。这是由于在电机反转那一刻,给定转矩角突然变为负值,导致制动转矩突然增大。可见本文所提电机控制系统和控制方法具有很高的调速性能。
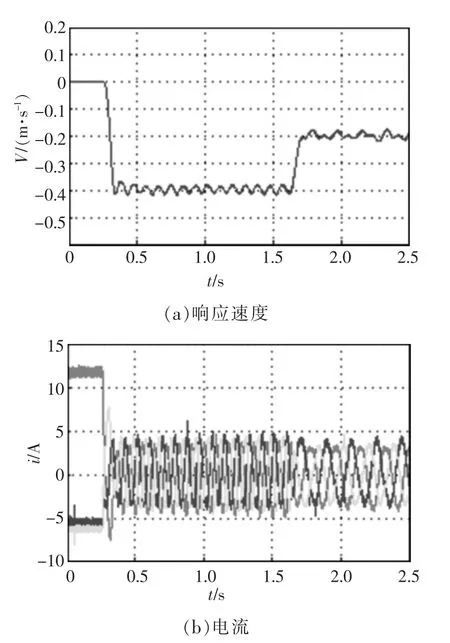
图10 -0.4升到-0.2 m/s速度响应和电流波形Fig.10 Speed and current responses with the speed changing from-0.4 to-0.2 m/s

图11 0.3 m/s降到-0.3 m/s速度响应和电流波形Fig.11 Speed and current responses with the speed changing from 0.3 to-0.3 m/s
5 结语
本文分析了MLFSPM电机的结构特点和数学模型。选取ATMEGA128单片机作为控制系统的核心,运用查表SVPWM的控制方法,搭建了MLFSPM电机的控制系统。充分利用单片机的外设资源,解决了电机运行方向突变时角度如何选择的问题,实现了MLFSPM电机的往复运行。实验结果验证了该系统能够稳定运行且有较好的调速性能;同时也验证了该系统可以应用于MLFSPM电机中,对降低电机控制系统成本和扩展应用范围具有参考意义。
[1]曹瑞武,程明,花为,等.磁路互补型模块化磁通切换永磁直线电机[J].中国电机工程学报,2011,31(6):58-65. Cao Ruiwu,Cheng Ming,Hua Wei,et al.Novel modularized flux-switching permanent magnet linear machine with complementary magnetic circuits[J].Proceedings of CSEE, 2011,31(6):58-65(in Chinese).
[2]郭冀岭,肖建,邱忠才,等.基于DSP28335的七相感应电机矢量控制[J].电源学报,2014,12(1):74-83. Guo Jiling,Xiao Jian,Qiu Zhongcai,et al.Vector control of seven-phase induction motor based on DSP28335[J]. Journal of Power Supply,2014,12(1):74-83(in Chinese).
[3]杨贵杰,孙力,翠乃政,等.空间矢量脉宽调制方法的研究[J].中国电机工程学报,2001,21(5):79-83. Yang Guijie,Sun Li,Cui Naizheng,et al.Study on method of the space vector PWM[J].Proceedings of CSEE,2001, 21(5):79-83(in Chinese).
[4]利剑,窦金生.基于SPWM的SVPWM算法[J].科学技术与工程,2011,11(26):6314-6318.
Li Jian,Dou Jinsheng.The algorithm based on SPWM implementing SVPWM[J].Science Technology and Engineering,2011,11(26):6314-6318(in Chinese).
[5]钱程.基于DSP的永磁同步电梯门机控制系统的设计[D].大连:大连理工大学,2008. Qian Cheng.Design of PMSM elevator door-motor control system based on DSP[D].Dalian:Dalian University of Technology,2008(in Chinese).
[6]Cao Ruiwu,Cheng Ming,Hua Wei,et al.Modeling of a complementary and modular linear flux-switching permanent magnet motor for urban rail transit applications[J]. IEEE Transaction on Energy Conversion,2012,27(2):489-497.
[7]朱瑛,程明,花为,等.磁通切换永磁电机的空间矢量脉宽调制控制[J].电机与控制学报,2010,14(3):45-50. Zhu Ying,Cheng Ming,Hua Wei,et al.Space-vector PWM control of flux-switching permanent magnet motor[J].Electric Machine and Control,2010,14(3):45-50(in Chinese).
Space-vector PWM Control of Novel Modularized Fluxswitching Permanent Magnet Linear Machine with Complementary Magnetic Circuits Based on ATMEGA128
CHENG Ming,KONG Longtao,ZHANG Bangfu
(School of Electrical Engineering,Southeast University,Nanjing 210096,China)
In order to control a new novel modularized flux switching permanent magnet linear machine with complementary magnetic circuits effectively,ATMEGA128 is used for motor control system in this paper.The new modularized flux-switching permanent magnet linear machine with complementary magnetic circuits(MLFSPM)motor is adopted as control object.Based on the analysis of the motor and the introduction of the Look-up-table SVPWM principle,a control system is established based on ATMEGA128 for MLFSPM.Experiment results verify the effectiveness and stability of the control system which also have a quick response to speed variation.
Mmodularized flux-switching permanent magnet linear machine with complementary magnetic circuits(MLFSP);single chip microcomputer;motor control;look-up-table SVPWM
程明 (1960-)男,博士,教授,博士生导师,IEEE fellow,IET fellow,研究方向:微特电机及控制、电力电子与电力传动、电动车驱动与控制等,E-mail:mcheng@ seu.edu.cn。
10.13234/j.issn.2095-2805.2017.1.9
:TM359.4
:A
2016-01-07
江苏省产学研前瞻性联合研究资助项目(BY201 5070-19)
Project Supported by the Scientific Research Foundation of Jiangsu Province,China under Project(BY2015070-19)
孔龙涛(1990-)男,硕士研究生,研究方向:电机驱动与控制,E-mail:kong longtaojiayou@126.com。
张邦富(1988-),男,博士研究生,研究方向:初级永磁型直线电机设计与分析,E-mail:bangfukuang@126.com。