智能化平面移动式立体车库研究*
2017-02-02康海刚吴上生林旺阳
康海刚 吴上生 林旺阳
智能化平面移动式立体车库研究*
康海刚1吴上生2林旺阳2
(1.广东科学技术职业学院计算机工程技术学院 2.华南理工大学机械与汽车工程学院)
介绍平面移动式立体车库的工作原理,分析现有平面移动式立体车库的优缺点。结合总体钢结构、载车板形式及其存放方式、搬运台车功能需要,分析汽车回转盘、升降台和曳引装置的结构功能,提出一种新型智能化平面移动式立体车库结构方案;设计载车板、搬运台车、汽车回转盘、曳引装置和升降台的机械结构,并对提升系统进行计算分析,论证了方案的可行性。
平面移动式立体车库;搬运台车;汽车回转盘;升降台;曳引装置
0 引言
随着家用汽车的普及和人们对汽车需求的增加,我国居民汽车拥有量呈井喷式增长[1]。但大量车辆造成的停车难问题,使城市交通拥堵和生活秩序混乱[2],制约了城市的发展,影响城市形象。因此,交通拥堵和秩序混乱等城市静态交通问题,己成为城市交通管理部门急需解决的问题[3]。
智能化平面移动式立体车库利用自动化和智能化的运行管理,具有操作简单、运行可靠、便于维护和车位用地面积小等优势,且车库层高小,空间利用率高,车库结构可变,是缓解交通、解决停车难问题的主要途径,被称为城市空间的“节能者”[4]。其缺点是能耗偏大,上下班等存取车高峰时段存取车时间过长。
智能化平面移动式立体车库在同一层由自动搬运台车沿轨道移动车辆,用载车板横向推送存取车辆;在不同层平面移动存取车辆由自动搬运台车和升降机配合进行,通过升降机的垂直升降和自动搬运台车的平面往复运动,将车辆自动移送到多层平面布置的停车区域[5]。
1 智能化平面移动式立体车库设计
1.1 总体结构
智能化平面移动式立体车库车位平面布局如图1所示[6-7],钢结构采用3×排列型,中间为巷道,每层巷道用两组定长的H钢200 mm×100 mm翼板水平放置,巷道内宽2706 mm;立柱采用H钢250 mm×250 mm型,梁采用槽钢180 mm×68 mm×8 mm,与巷道平行的梁为纵梁,与巷道垂直的梁为横梁;巷道两边的停放车位对称布置,停放车位空间尺寸为5444 mm×1950 mm×1870 mm;本设计提出将提升井设置在巷道两端,提升井长宽5444 mm×3356 mm;每层设置的自动搬运台车可自动运行到提升井中;在提升井中由梳齿型载车板对存取车辆进行垂向交换。本方案所提出的梳齿型载车板由升降台载车板、旋转载车板和车位载车板构成。
智能化平面移动式立体车库车位垂向位置关系如图2所示,在提升井地下平台放置汽车回转盘。地下平台分2级,离地面深度分别为750 mm和350 mm,直径分别为2280 mm和2590 mm。实际上,梳齿式载车板就是升降台的简化形式,结合智能搬运台车和提升井做了结构改进;提升系统采用曳引驱动,由8个滑轮和1个曳引轮组合,并配以对重块,通过钢丝绳的缠绕传动实现提升功能。

图2 智能化平面移动式立体车库车位垂向位置关系
1.2 存车方法
1)如果指定车辆停放在第层某个车位,汽车回转盘的位置如图2所示,升降台位于汽车回转盘上且旋转载车板下。存取车平面示意图如图3所示,当车开至车库入口位置,汽车回转盘逆时针旋转90o,车辆行使到汽车回转盘的旋转载车板上,汽车回转盘再顺时针旋转90o;曳引驱动系统工作,提升升降台,使升降台的梳齿管导轮高出旋转载车板22 mm~ 32 mm,升降台刚好提起车辆,即车转移至升降台。关闭曳引驱动系统,启动液压缸系统运行对中装置,对中装置强制车相对于升降台对称放置,对中完成后液压缸复位,然后启动曳引驱动系统,继续提升升降台至第层巷道上面300 mm高度时停止上升。
2)在此过程中,智能搬运台车无论处于任何位置都使其行走至入口提升井旁边等候存车;智能搬运台车沿轨道移动到提升井内,升降台下降,升降台与智能搬运台车上的载车板梳齿交换,车辆切换到智能搬运台车的载车板上;车辆通过梳齿交换后,升降台下降至地下的汽车回转盘上,等候下一次存车;智能搬运台车、载车板连同车辆移动至指定的停车位旁,推送机构推送车位载车板入停车位,存车过程结束。
1.3 取车方法
1)假设车辆停放在第层某个车位,汽车回转盘的位置如图2所示,升降台位于汽车回转盘上且旋转载车板下。搬运台车无论处于任何位置都使其行走至车停放的第层某个车位旁,搬运台车的推送机构拉取车位载车板连同车辆从停车位至搬运台车后,移动到出口提升井旁;曳引驱动系统提升升降台至第层巷道下面110 mm时停止上升;搬运台车自动行驶到提升井,再继续上升升降台至第层巷道上面305 mm时停止,搬运台车上载车板通过梳齿交换将车辆切换到升降台上。
2)智能搬运台车自动离开提升井,升降台下降至汽车回转盘上并再进行梳齿交换,将车辆转移至旋转载车板上,汽车回转盘顺时针旋转90o,车辆开出汽车回转盘从出口离开车库,汽车回转盘逆时针旋转90o复位,取车过程结束。
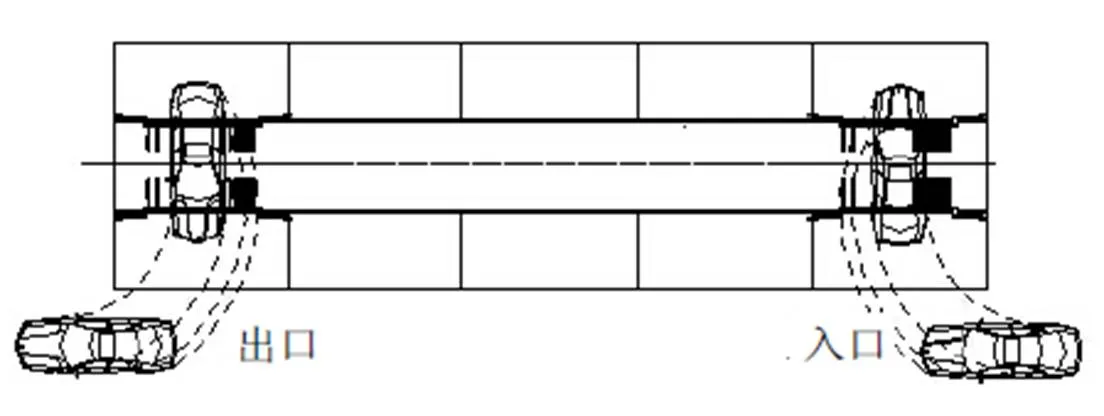
图3 存取车平面示意图
2 载车板结构
本方案所有载车板均采用梳齿结构,如图4所示。梳齿结构载车板主要有一体式梳齿结构和双边式梳齿结构2种形式。梳齿载车板的交换原理是通过载车板在垂直方向上的交错实现车辆的转移。采用梳齿结构载车板的平面移动式立体车库中同时存在这2种载车板,车位载车板和旋转载车板采用一体式梳齿结构,升降台载车板采用双边式梳齿结构。
一体式梳齿载车板纵向支撑梁采用方钢100 mm×100 mm×6 mm,横向梳齿管采用方钢50 mm× 50 mm×4 mm,将横向小方钢按中心距150 mm排列焊接在大方钢上;双边式梳齿型载车板纵向的支撑梁采用矩形钢120 mm×60 mm×6 mm,小方钢的一端通过焊接与矩形钢侧面驳接,两边对称制作。
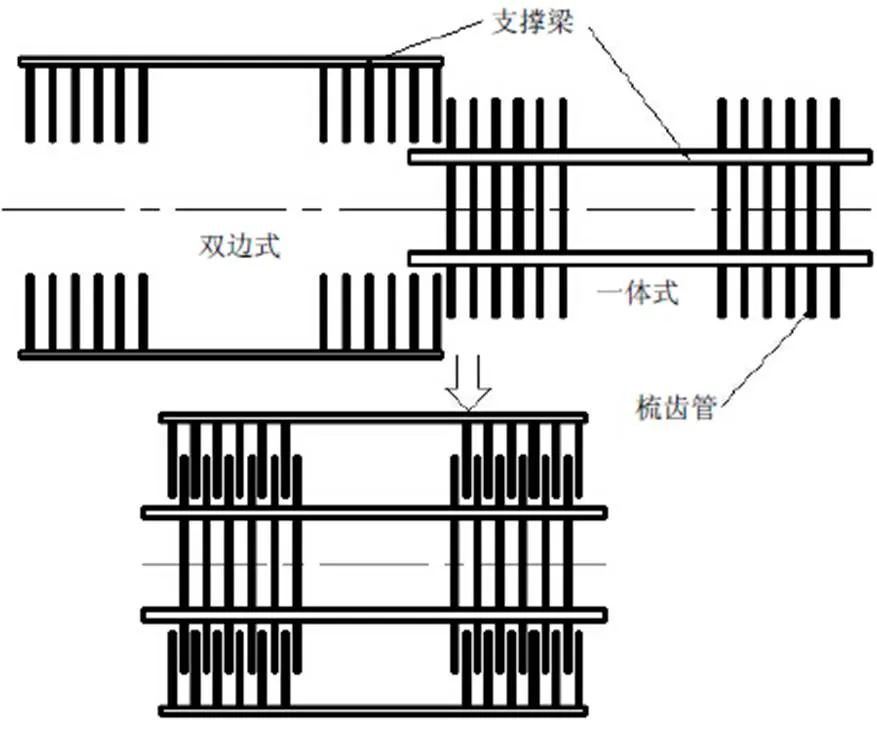
图4 梳齿交换原理
3 智能搬运台车
本方案采用单层行走式智能搬运台车,每层巷道都需配置一辆智能搬运台车。单层行走式智能搬运台车存取车时间更短、效率更高,可提高存取车效率,具体结构如图5所示。
智能搬运台车采用滚珠丝杆驱动,由伺服电机驱动运动装置、横向推送机构、型钢框架和电控系统4部分组成。其中伺服电机驱动运动装置包括行走伺服驱动电机、驱动同步轴、主动轮组件、从动轮组件、皮带轮组件和轴承座;横向推送机构包括丝杆驱动电机组件、丝杆及载车板导轮架组件和推送机构等。
在运动装置中,主动轮和从动轮固定在台车型钢框架的轴承座上,主动轮与驱动同轴配合,驱动轴通过皮带轮与电机轴固定连接,电机带动驱动轴转动而使主动轮转动,从动轮跟随滚动。在横向推送机构中,两边对称安装的导轨作为滚珠丝杆驱动轨道,丝杆螺母上连接推送机构,推送机构两头对称制作,在驱动电机作用下,推送机构可沿着丝杆方向来回运动,满足存取车的需求。

图5 搬运台车结构图
4 汽车回转盘
汽车回转盘位于在平面移动式立体车库提升井的地下平台上,既实现车辆的旋转和对中动作,还能与升降机上载车板交换以实现车辆在汽车回转盘和升降机上的互相转移。
汽车回转盘组合机构包括:旋转底盘支撑导轮、回转支撑座、旋转中心轴、驱动电机、旋转底盘驱动导轮、旋转载车板支撑导轮、对中角钢、梳齿式载车板、旋转底盘组件和双向液压缸,如图6所示。

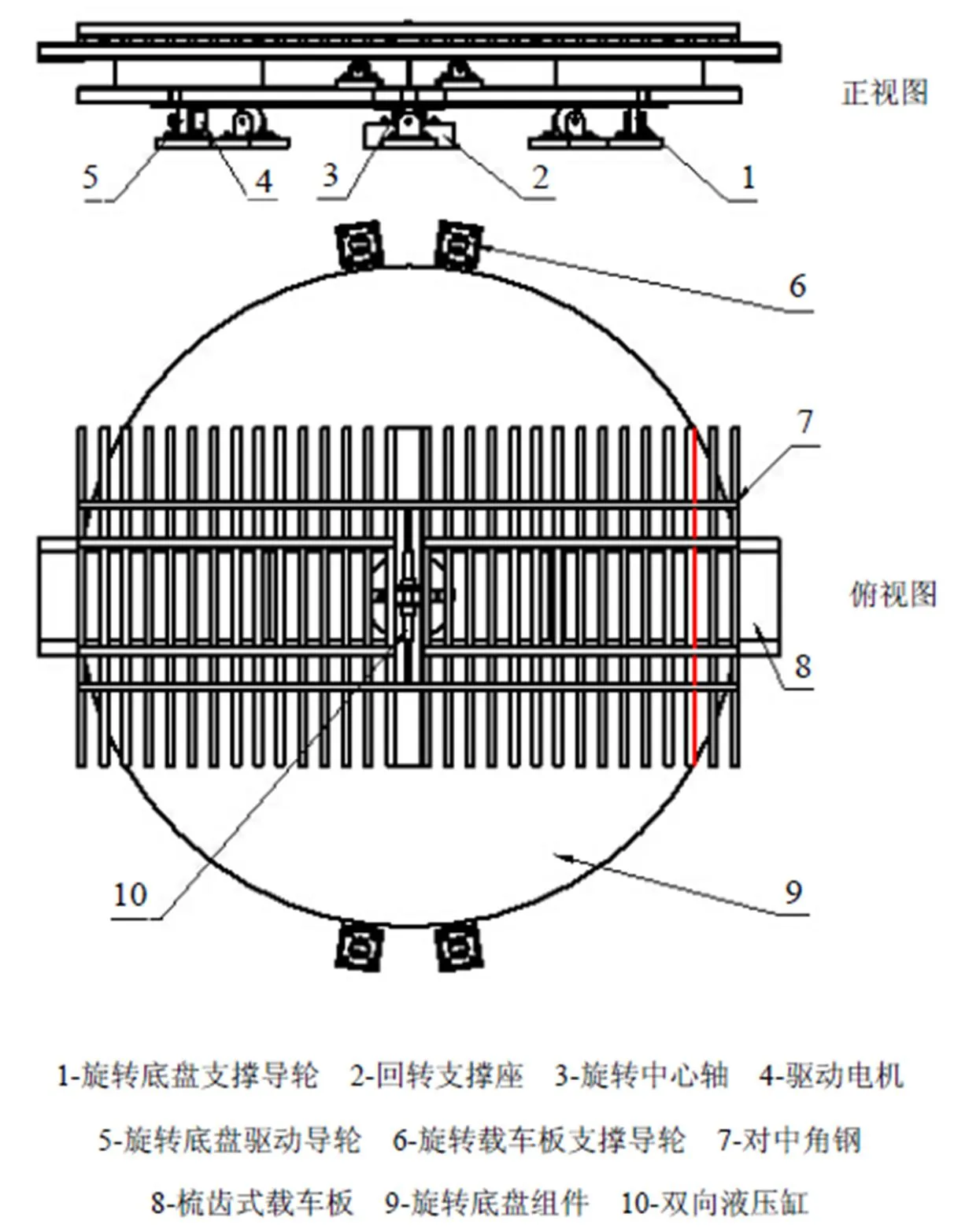
图6 汽车回转盘结构图
5 提升系统
5.1 曳引装置
提升系统包括驱动装置和升降台,结构布局由其驱动方式决定。本方案中采用电机上置的曳引驱动方式,其中曳引机采用双轴式电机,提升井两边的曳引装置对称安装,如图7所示。
吊点提升动滑轮a、d通过支架固定在升降台上;对重块吊点动滑轮g、i通过支架固定在对重块上;平衡定滑轮b、c、e、h固定在车库顶部的钢结构上,并保持b、c两点在同一水平线上;曳引轮f连接在曳引机上,曳引机固定在顶层钢结构上;钢丝绳如图7所示卷绕各个滑轮,左右两端分别连接调节螺母,调节螺母与顶层钢结构配合,这样在无驱动力状态下升降台和对重块都能保持水平。曳引机驱动曳引轮转动,对重块的运动方向始终与提升架运动方向相反,改变曳引轮上钢丝绳的卷绕根数可改变提升高度,调节螺母可调整提升预紧力。
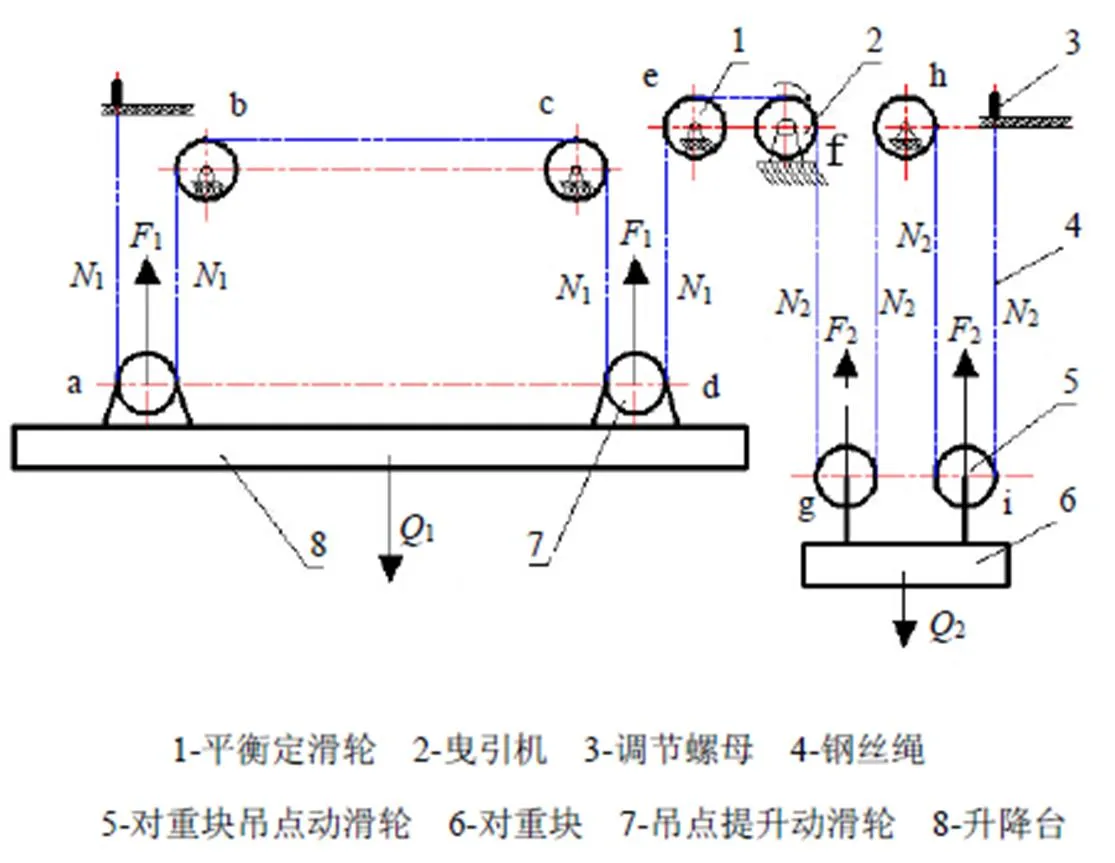
图7 曳引机构运动关系
5.1.1速度分析
如图7中,设曳引机顺时针方向转动速度为,在时间内转动的行程为,升降台上升的速度为1,上升高度为1,且
1= d1/d(1)
对重块下降的速度为2,下降高度为2,且
2= d2/d(2)
钢丝绳通过4个点拉动升降台,故钢丝绳运动的行程为升降台上升高度的4倍,即
= 41(3)
同样钢丝绳的行程也为对重块下降高度的4倍,即
= 42(4)
综合式(1)~式(4),可得到
1=2
即升降台的速度和对重块的速度数值相等方向相反,说明升降台和对重块的运动高度总是相等方向相反。假设升降台和对重块某一时间的高度分别为1和2,车库总高为,当升降台处于地下时,即
1= 0
2=
当经过提升运动,升降台上升和对重块下降的高度时,可以得到
1+2= 0++−=
所以升降台和对重块的高度之和等于车库高度,是一个常数,则可以得到
1≤
2≤
即升降台和对重块的高度都不会超出车库高度。
5.1.2受力分析
1)如图7所示,在非工作状态下,12,可得到
121/2 (5)
11/2=1/4 (6)
同理可得到
22/2=Q/4 (7)
综合式(5)~式(7),可得到
12=4
其中,1为拉力1;2为拉力2;为摩擦系数;1为合力1;2为合力2;1为重力1;2为重力2。
在到达最大静摩擦力前,摩擦力在0max之间浮动,故maxmax。1是无车状态下的升降台重量,故对重块的重量取值应为
21+4max
2)当钢丝绳沿曳引轮处于临界滑移状态时[8],钢丝绳的有效张力值等于曳引系数e,即
1/2=e
为使提升机构可靠不滑动,考虑到有充足的曳引力,必须满足
1/2≤e
其中,1/2是曳引轮两边钢丝绳较大静张力与较小静张力之比;是钢丝绳在滑轮槽中的当量盘摩擦系数,对半圆形槽=1.229983,为钢丝绳与滑轮槽之间的实际摩擦系数,当滑轮槽为钢或铸铁时通常取为= 0.08999;是钢丝绳在曳引轮上的包角。
在运行状态下,由于升降台的载荷、位置和运行方向都在变化,因此在各种状态下都要使升降机有足够大的曳引力,即
1/2≤e
其中,为制动加速度;是考虑制动加速度有关的系数,且=(g+)/(g−),g为重力加速度。
5.2 升降台
本方案的升降台在双边式梳齿型载车板的基础上加以改进,增加了4条提升臂,并且改变了梳齿管的形式。升降台的双边式梳齿型载车板一分为二,在巷道两边悬置,保持单边水平。升降台使用双轴式曳引机,保持双边曳引系统同时升降,避免高度差,如图8所示。
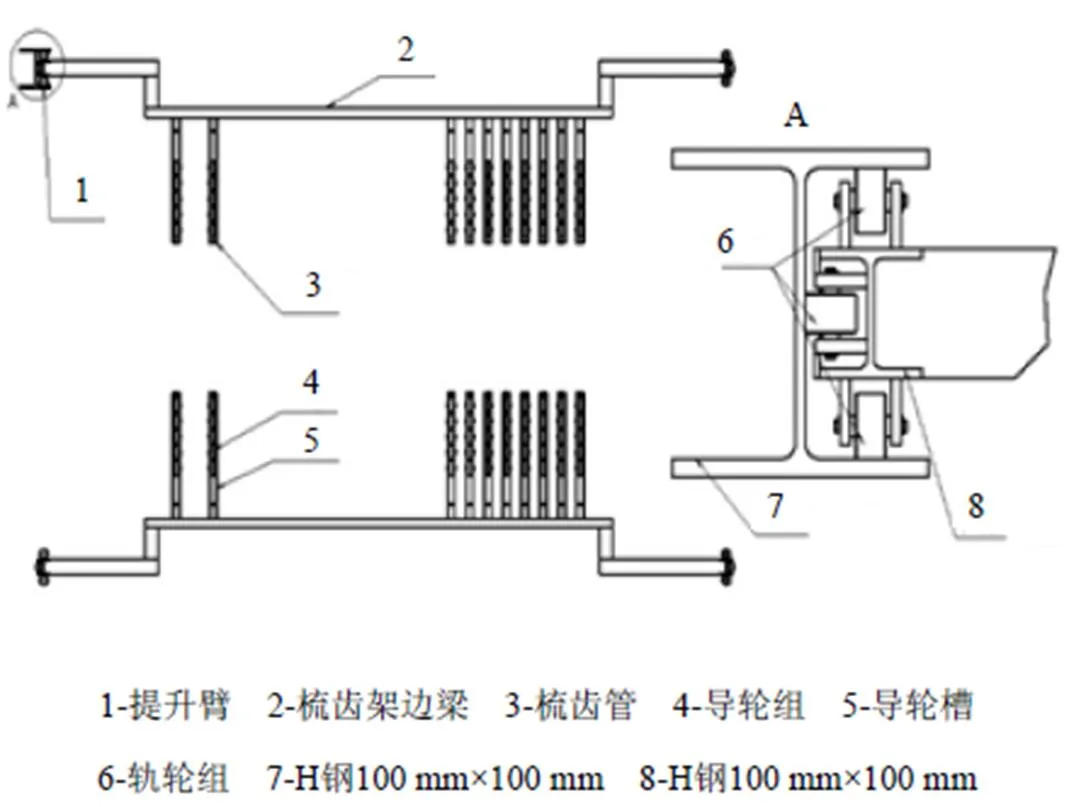
图8 升降台
提升吊挂点设置在提升臂上,考虑到吊挂点与重心的偏移,两边梳齿架可能会向中间倾斜,故在提升臂上设计了导轮。提升臂以H钢100 mm×100 mm为主体,在H钢两侧翼缘上不对称地焊接2个轮组,在腹板的槽中焊接2个轮组,将提升臂装在立柱H钢的槽中,由这些零件构成的组件作为提升机的提升轨道,如图8所示。为了配合旋转盘上的对中功能,梳齿管没有使用方管,而是用折成的槽型板,在槽型板上安装若干导轮组,即为一个梳齿管单元。
6 结语
本文提出的智能化平面移动式立体车库具有以下优点:
1)提升井设置在巷道中,每层可增加2个车位,提高存车密度;
2)采用梳齿式载车板,交换简单迅速,并且无需还回载车板,能够提高车库总体的存取车效率;
3)搬运台车采用滚珠丝杆驱动,速度易于控制、精度好,同时占用较小空间高度;
4)在提升井中采用汽车回转盘调整进出库车辆位置,节省出入口的空间,避免倒车入库,也使车辆有充足的调整空间;
5)在汽车回转盘上增加对中装置,可以自动调整车辆至指定角度和位置,使存取车更简单且可节省时间。
[1] 李卫.多出入口方形塔式智能立体车库监控系统研究开发[D].广州:华南理工大学,2013.
[2] 白玉铭.垂直循环式立体车库设计研究[D].哈尔滨:哈尔滨工程大学,2007.
[3] Boda Vamsee K, Nasipuri Asis, Howitt Ivan. Design considerations for a wireless sensor network for locating parking spaces[J]. Southeast Con, IEEE, 2009:698-703.
[4] Tang Minan, Ren Enen. Site Selection of mechanical parking garage in high density vehicle urban area based on genetic algorithm-support vector machine[J].Second International Symposium on Knowledge Acquisition and Modeling,2009,2: 100-102.
[5] 陈婧,田怀文.大型垂直循环横向平移立体车库的结构设计及稳定性分析[J].机械设计,2013,30(5):67-70.
[6] 林旺阳,吴上生,戴水文.高层平面移动式立体车库结构设计及稳定性分析[J].现代制造工程,2017(1):130-135.
[7] 林旺阳.平面移动式立体车库关键技术研究[D].广州:华南理工大学,2016.
[8] 刘平辉.电梯升降式立体车库曳引力的分析与计算[J].科技资讯,2009(18):65.
Research on Intelligent Planar Movable Stereo Garage
Kang Haigang1Wu Shangsheng2Lin Wangyang2
(1.Guangdong Polytechnic of Science and Technology, Computer Engineering Technical College 2.South China University of Technology, School of Mechanical and Automotive Engineering)
This paper introduces the working principle of planar movable stereo garage, analyzed the advantages and disadvantages of the existing planar movable stereo garage, combined with the overall steel structure, car carrying board and its storage methods and the functional needs of conveying trolley, analyze the structure and function of automobile rotary disk, elevating platform and the traction device, researched and put forward the structure scheme of a new type of intelligent planar movable stereo garage, designed the mechanical structure of car carrying board, conveying trolleys, automobile rotary disk, the traction device and elevating platform, and lifting system is calculated and analyzed to confirm the feasibility of the scheme.
Planar Movable Stereo Garage; Conveying Trolley; Automobile Rotary Disk; Elevating Platform; Traction Device
康海刚,男,1980年生,研究生,讲师,主要研究方向:数学建模、机电一体化技术等。E-mail: h-gang@163.com
吴上生,男,1963年生,博士,教授,主要研究方向:精密机械设计制造、自动化等。E-mail: shshwu@scut.edu.cn
广州市南沙区科技计划资助项目(2016CX0)
