TCP自动校正系统在螺柱焊接中的应用
2017-01-20何小明沈玉勇贾建龙
何小明,沈玉勇,贾建龙
(上汽大众汽车有限公司四厂车身车间,江苏南京,211100)
TCP自动校正系统在螺柱焊接中的应用
何小明,沈玉勇,贾建龙
(上汽大众汽车有限公司四厂车身车间,江苏南京,211100)
汽车车身焊接对螺柱焊接精度要求较高。在普通自动螺柱焊接系统基础上搭建测量设备,进行网络配置、校正参数设置和补偿算法设计,最终研制了一套TCP(Tool Center Point)自动校正系统。该系统有效补偿了机器人和螺柱焊枪的精度误差,大大提高了螺柱尺寸的稳定性和可靠性。该技术在焊接精度要求较高的其他场合也值得参考借鉴。
螺柱焊;TCP;自动校正系统;精度
引言
TCP(Tool Center Point)是机器人的工具中心点,自动螺柱焊接系统中的TCP就是螺柱焊枪的螺钉位置。TCP的数值可在安装工具手动示教,也可离线计算[1]。工业机器人记录的是一些以特定参考坐标为基准的空间轨迹点,而这些轨迹点的坐标都以机器人TCP为基础,因此在轨迹点坐标不变的情况下,改变TCP值即可改变机器人轨迹[2]。TCP自动校正系统正是利用这个特性,实现了自动螺柱焊枪位置自动补偿修正的目的。
1 螺柱焊接精度问题介绍
由于螺柱焊接夹持器和接收块属于易损件,更换频繁,人为安装误差和零部件加工误差导致螺柱焊枪的TCP不稳定,易造成螺钉位置尺寸超差[3]。后保螺柱焊接位置如图1中的灰色圆点所示。当螺柱焊枪夹持器被撞击或更换后,产生了较大累计偏差,需要根据三坐标测量结果不断跟踪优化机器人轨迹。但车身三坐标测量周期长,无法满足及时发现、及时调整的要求,存在质量风险。

图1 后保螺柱焊接位置
工艺标准要求每个螺柱的重复精度不超过0.4 mm。传统方法只能依靠机器人系统开环控制,无法满足现有的高精度和高效率生产需求。因此,需在现有的开环系统中增加一套动检测螺钉位置变化并对其自动补偿的设备,将现有开环焊接系统升级为闭环自动控制系统。带TCP自动补偿的螺柱焊接系统可大大提高人为调整螺柱位置的工作效率和螺柱尺寸控制精度。
2 TCP自动校正设备
2.1 LEONI advintec TCP测量设备
LEONI advintec TCP是一种TCP测量新技术设备,由Control unit和Measure sensor组成,针对不同型号的机器人及工具,可预先设置基本算法及逻辑偏移法。该测量设备通过Interbus网络下挂在机器人系统中,测量最佳点是以终端执行工具为基准,当工具出现任何细微变化时都可被测量出来,并进行自动补偿。该测量设备使抽象的空间变化数字化、可视化,可应用于多种机器人自动化领域。LEONI advintec TCP测量设备应用方法如图2所示[4]。

图2 LEONI advintec TCP自动测量系统
2.2 网络配置
原CMD软件Interbus网络配置系统中只有KUKA PCI板卡和Emhart螺柱焊机两个设备,如图3所示。安装TCP自动测量系统需在原CMD软件Interbus网络中增加LEONI advintec TCP设备,如图4所示。另外,在CMD软件中需分配过程数据,并将*.BG4文件转换成机器人系统能够识别的*.SVC文件[5]。

图3 原系统网络配置图

图4 新系统网络配置图
2.3 校正设备参数设置
此控制器可根据需求设置不同类型的测量模式,因螺柱焊接是一空间结构的偏移,因此在此方案中选择3D模式。具体参数如表1所示。
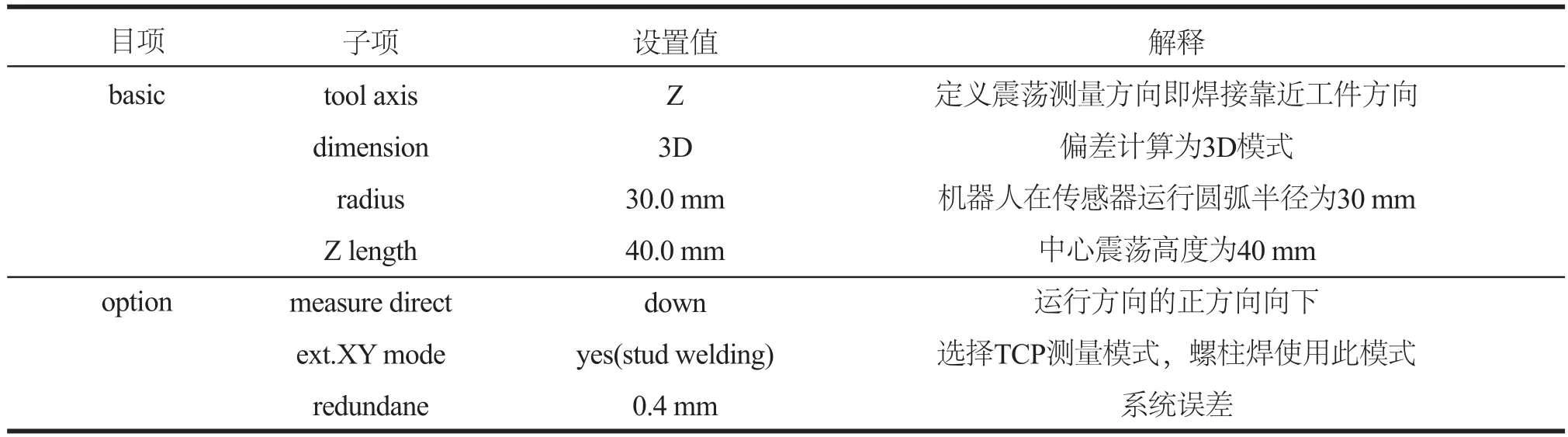
表1 控制器参数设置

表1 控制器参数设置
2.4 补偿算法
螺柱尺寸偏差测量与补偿都是机器人后台自动完成的,无需人为干预,大大提高了设备自动化程度,从而提高了补偿精度和设备开通率。其算法流程图如图5所示。

图5 补偿算法流程图
3 结束语
经实践证明:自动螺柱焊接应用TCP自动校正系统后,可自动补偿螺柱位置偏移,大大提高了螺柱尺寸精度,有效地保证了螺柱质量。该多功能TCP测量系统不仅可用于螺柱焊接,并且可应用于其它对于焊接精度要求比较高的场合,如CMT、带换枪盘的工具,以及焊点要求比较高的点焊设备等。本文所述应用具有推广意义。
[1]张宪民,杨丽新,黄沿江.工业机器人应用基础[M]. 北京:机械工业出版社,2015.
[2]李阳.工业机器人工作站维护保养[M]. 北京:机械工业出版社,2013.
[3]Stanley Engineered Fastening Tucker GmbH. Assembly Instructions Stud weld head LM 310[DB/CD].2014.
[4]LEONI Engineering Products&Services. Initial Startup of advintecTCP-3D/TCP-6D Measuring Device Version[DB/ CD].2013.
[5]郭其一,黄世泽.现场总线与工业以太网应用[M].北京: 科学出版社, 2016.
Application of TCP Automatic Calibration System in Stud Welding
HE Xiao-ming, SHEN Yu-yong, JIA Jian-long
(Body Shop of Nanjing Branch, Shanghai Volkswagen Co., Ltd., Nanjing, Jiangsu,211100, China)
Automobile welding requires high precision of stud welding. Based on the common automatic stud welding system, the measurement device is established, and the network configuration, the calibration parameter option and the compensation algorithm design are carried out, to ultimately develop a set of TCP (Center Point Tool) automatic calibration system. This system effectively compensates for the error of robot and stud welding gun, greatly improving the stability and reliability of stud size. Such a technology has the potential to be popularized in other occasions where a high welding precision is required.
Stud Welding; TCP (Center Point Tool); Automatic Calibration System; Precision
TG453+.3
A
2095-8412 (2016) 06-1141-03
10.14103/j.issn.2095-8412.2016.06.023
何小明(1986-),男,四川眉山人,本科,上汽大众汽车有限公司四厂车身现场工程师/值班长。主要从事车身质量控制工作。
