基于新型滑模观测器的永磁直驱风机控制
2017-01-20朱明东黄科元黄守道
朱明东,黄科元,黄守道,郭 兴
(湖南大学电气与信息工程学院,湖南长沙410082)
基于新型滑模观测器的永磁直驱风机控制
朱明东,黄科元,黄守道,郭 兴
(湖南大学电气与信息工程学院,湖南长沙410082)
针对永磁同步电机高速运行的无传感器控制,结合滑模观测器对电机参数变化和测量具有很强鲁棒性且响应迅速的优点,引入连续的饱和函数,设计了防高频抖动的新型滑模观测器,并详细分析了基于转子磁场定向的矢量控制策略,建立了基于新型滑模观测器的永磁直驱风力发电机的无速度传感器矢量控制模型,并进行实验验证。实验结果表明,该控制系统不仅能准确估算风机转子的角度和位置信息,实现高性能的无传感器矢量控制,而且能够实现有功、无功功率的独立调节,具有良好的动静态性能。
滑模观测器;饱和函数;永磁直驱风力发电机;矢量控制
大功率永磁直驱风电系统是目前最具实用前景的风电系统之一。与双馈感应风电系统相比,永磁直驱风电系统具有发电效率高、可靠性高、省去了变速箱、运行及维护成本低以及更优的低电压穿越能力等优点,因而成为研究热点[1]。
高性能的永磁同步发电机(PMSG)矢量控制需要准确的电机转子角度和位置信息,传统的方法是在转子轴上安装传感器,但是这样会降低系统的可靠性,提高系统成本。为解决机械传感器给系统带来的不便,无传感器控制方法越来越受到人们的重视,应用滑模观测器进行速度估算就是其中一种[2-5]。滑模观测器与控制对象的参数变化以及扰动无关,具有很强的鲁棒性且响应迅速,因此适合对风速不稳,发电不连续,且运行在环境恶劣的野外或者海上的风电系统进行速度估算。
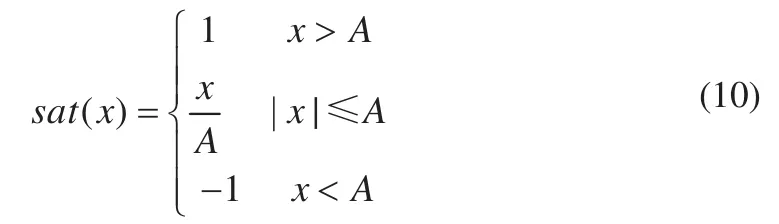
由于风电系统具有一定的切入转速,因此不需要进行无速度传感器最难实现的初始定位和低速估算。但是传统的滑模观测器在本质上是不连续的开关控制,会引起系统发生抖动,本文设计了一种新型滑模观测器,采用连续的饱和函数代替不连续的开关函数,有效地抑制了滑模控制所产生的抖振现象[6-7]。结合永磁直驱风电系统的特点,本文建立了基于新型滑模观测器的永磁直驱风力发电机转子磁场定向的矢量控制系统模型,实现了永磁风力发电机的无速度传感器控制。通过实验进行验证,证实了该控制策略的可行性和有效性。
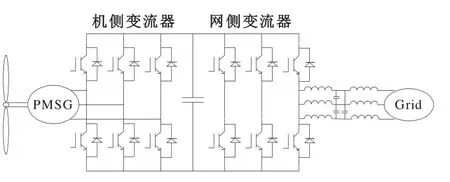
图1 永磁直驱风电系统结构图
1 永磁直驱风力发电机控制策略
永磁直驱风电系统的典型拓扑结构如图1所示。系统主要包括永磁同步发电机、机侧变流器、稳压大电容、网侧变流器以及LCL滤波装置。
该系统变流器采用背靠背(back to back)双脉宽调制结构,与采用不可控整流的永磁直驱风电系统相比,该系统通过控制电机侧变流器可减小发电机定子电流的谐波,减小电机损耗和转矩脉动,并提高系统的动态响应速度,而且能够灵活实现发电机的起动和制动等功能。

转矩方程为:

为了满足变速恒频风电系统的控制要求,发电机转速必须快速响应风速的变化,实现风能利用最大功率点的跟踪,这就要求永磁同步发电机输出功率的同时,还要具备良好的机械特性,因此,不论是凸极还是隐极发电机,=0控制下的永磁同步发电机都能够很好地满足风力发电系统对转速控制性能的要求。在这种控制方式下,转矩方程可以转化为式(3):


图2 电机侧变流器控制框图
2 基于滑模观测器的位置估测
2.1 滑模观测器原理
滑模观测器的实质是状态重构,其原理是重新构造一个系统,利用原系统可直接测量的变量作为输入信号,并使其输出信号在一定条件下等于原系统的状态。其原理框图如图3所示。
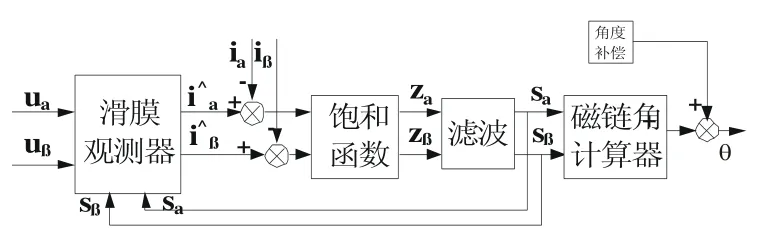
图3 滑模观测器原理框图
传统的滑模观测器本质上是在位置观测时利用结构变换开关,以很高的频率来回切换,快速修正反电势,使估算电流和实际电流相等,从而获取电机的转子位置和转速值。但由于本质上是不连续的开关控制,当系统进入稳态后,状态变量进行高速滑模切换时就会存在高频抖动。抖动是滑模控制系统的最大缺点,抖动的存在会降低控制系统的精度,影响控制系统的动态性能,严重的还会影响到控制系统的稳定性[9-10]。为了消除滑模观测器中的高频抖动,永磁电机的最优控制主要采用的是砰-砰综合控制形式,在原来依据电机方程直接计算位置的基础上增加了一个校正环节,快速修正参数变化和测量产生的误差,最终达到稳定点。
2.2 新型滑模观测器设计
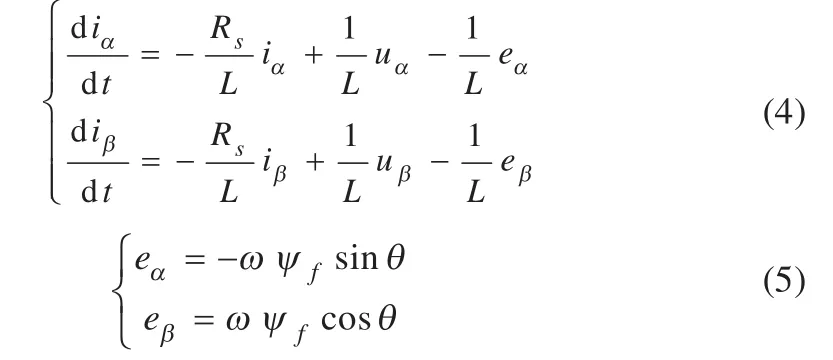
面贴式永磁同步电机在α-β坐标系中的数学模型为:
根据永磁同步电机的数学模型,构造滑模观测器如式(6):




根据图4滑模的电压矢量参考坐标系计算可知,补偿后的估算角公式应为:

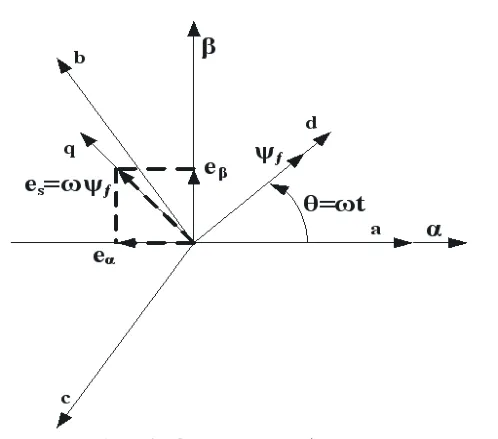
图4 滑模的电压矢量参考坐标系
3 实验验证
为了验证基于新型滑模观测器的无速度传感器方法在永磁直驱风电系统中的可行性,在永磁直驱风电系统模拟平台上进行了实验验证(图5)。实验以TMS320F2808作为主控芯片,永磁同步发电机为一台7.5 kW,额定电压380 V,额定电流17 A的4极电机。用一台7.5 kW的直流电动机模拟风机,电机的额定电枢电压和额定电枢电流分别为440 V和19 A,额定转速为2 980 r/min。双PWM变流器分别连接电网和永磁同步发电机,直流母线电压为650 V,逆变器每相额定输出电流为15 A。模拟平台控制系统结构图如图6,模拟系统的实验波形如图7。

图5 直驱型风力发电系统模拟实验平台

图6 控制系统结构图
从图7(a)可以看出,滑模观测器估测出的角度非常准确,相位无偏移。图7(b)表示当发电机转速从1 000 r/min降到500 r/min的动态过程中,滑模观测器响应迅速,估测出的转速和角度准确,基本无波动,具有很好的动态性能。
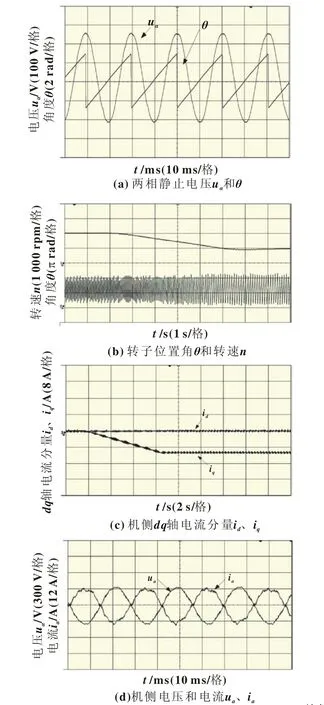
流以及网侧电压和电流,图中电流的正弦度好,说明系统有良好的电流控制效果。

图7 永磁直驱风电模拟系统实验波形
4 结论
为了获得准确的转子角度和位置信息,克服传统滑模观测器高频抖动的缺陷,本文设计了一种新型滑模观测器,增加了校正环节以快速修正参数变化和测量误差,建立了基于新型滑模观测器的永磁直驱风力发电机的无速度传感器矢量控制模型。通过实验结果可以看出:基于新型滑模观测器的无速度传感器控制方法估算的角度准确,电流、电压控制效果良好,响应迅速;永磁直驱风力发电机控制系统的动态、静态性能良好。
[1]YANG S Y,ZHANG X,ZHANG C W,et al.Sensorless control for PMSG in direct-drive wind turbines[C]//International Symposium on Power Electronics for Distributed Generation Systems.Hefei, China:IEEE,2010:81-84.
[2]FAN S W,WANG P,WEN C X.A new sensorless control strategy used in direct-drive PMSG wind power system[C]//International Symposium on Power Electronics for Distributed Generation Systems.Hefei,China:IEEE,2010:611-615.
[3]王剑飞,胡书举,赵栋利,等.永磁直驱型风力发电机的无传感器控制[J].电机与控制应用,2009,36(6):21-25.
[4]HALKOSAARI T.Speed sensorless vector control of a redundant permanent magnet wind power generator[C]//International Symposium on Industrial Electronics.Vigo,Spain:IEEE,2007:2595-2600.
[5]易映萍,刘普,吴金龙.永磁直驱风力发电机无传感器矢量控制研究[J].电气传动,2011,41(4):12-15.
[6]赵仁德,刘星,马帅,等.直驱永磁同步风力发电机无位置传感器控制[J].电机与控制学报,2010,14(7):13-17.
[7]ILIOUDIS V C,MARGARIS N I.PMSM sensorless speed estimation based on sliding mode observers[C]//Power Electronics Specialists Conference.Rhodes,Greece:IEEE,2008:2838-2843.
[8]黄飞,皮佑国.基于滑模观测器的永磁同步电机无位置传感器控制的研究[J].计算技术与自动化,2009,28(2):32-36.
[9]PAPONPEN K,KONGHIRUN M.An improved sliding mode observer for speed sensorless vector control drive of PMSM[C]// Power Electronics and Motion Control Conference.Shanghai,China:IEEE,2006:1-5.
[10]LIU J X,YANG G J,LI T C.A new approach to estimated rotor position for PMSM based on sliding mode observer[C]//International Conference on Electrical Machines and Systems.Seoul, Korea:IEEE,2007:426-431.
Research of control method of permanent magnet direct-drive wind generator based on new sliding mode observer

Combined with the advantage that sliding mode observer had a strong robustness to motor parameter variations and measurement, a new type of sliding mode observer was designed for sensorless control for high-speed operation of permanent magnet synchronous motor.To avoid the high-frequency jitter, continuous saturation function was introduced.And a strategy which based on rotor field oriented vector control was analyzed in detail,a new sliding mode observer-based sensorless vector control model for permanent magnet direct-drive wind generator was established.Finally,it conducted the experimental verification.The experimental results show that the control system is not only able to accurately estimate the rotor angle and position information of wind generator to achieve high performance sensorless vector control,but also capable of achieving active and reactive power adjusted independently,acquiring a good dynamic and static performance.
sliding mode observer;saturation function;permanent magnet direct-drive wind generator;vector control
TM315
A
1002-087 X(2016)03-0672-03
2015-08-26
国家自然科学基金(50907020);教育部高等学校博士学科点专项科研基金 (200805321038);湖南省博士创新基金(CX2010B149)
朱明东(1989—),男,河南省人,硕士生,主要研究方向为风力发电与电机控制。
