“机跟炉”协调控制系统参数整定规律研究
2017-01-19卫丹靖
卫丹靖,田 亮,边 防,张 全
(1. 华北电力大学 控制与计算机工程学院,河北 保定 071003; 2. 京能康巴什热电厂,内蒙古 鄂尔多斯 550002)
“机跟炉”协调控制系统参数整定规律研究
卫丹靖1,田 亮1,边 防2,张 全2
(1. 华北电力大学 控制与计算机工程学院,河北 保定 071003; 2. 京能康巴什热电厂,内蒙古 鄂尔多斯 550002)
特殊情况下火电机组协调控制系统需采用“机跟炉”控制方式维持主汽压等关键参数的稳定。研究一种利用机组简化非线性动态模型直接求取控制器参数的方法。对模型进行工作点线性化,结合“机跟炉”控制系统框图,推导出汽轮机侧控制回路闭环条件下锅炉燃料量对发电功率的开环传递函数,对其进行化简可计算锅炉侧控制器参数,并可直观地显示出被控对象参数与控制器参数之间的变化规律。针对一330 MW机组进行调试,故障情况下协调控制系统由“炉跟机”切换到“机跟炉”模式,蒸汽压力迅速保持稳定且发电负荷没发生大的扰动,表明该方法得到的参数具有足够的准确度。
协调控制系统;机跟炉方式;参数整定;动态模型
0 引 言
火电机组协调控制系统多是在“炉跟机”或“机跟炉”基本控制方案基础上增加指令前馈、动态补偿等环节构成的。为满足电网AGC(自动发电控制)响应速率要求,以“炉跟机”为基础的协调控制系统应用最为普遍,但在特殊工况及一些特定条件下,仍需要采用以“机跟炉”为基础的协调控制系统[1]。
相对于“炉跟机”方案“机跟炉”协调控制系统能够有效保证变负荷工况下主汽压力的稳定性,大幅减小锅炉燃料量及汽温、氧量等主要运行参数的波动,有利于机组安全经济运行[2]。上海外三1 000 MW超超临界机组为降低发电煤耗[3],汽轮机高压缸进汽调节阀全开机组工作于纯滑压方式下,协调控制系统必须采用“机跟炉”方式;西门子“PROFI”火电机组优化软件其协调控制系统也采用“机跟炉”基本方案[4]。
虽然国外内学者提出多种协调控制系统PID参数整定方法,如:遗传算法协调控制系统鲁棒PID参数寻优[5];DRNN神经网络多变量自整定PID[6];智能解耦协调控制系统参数自整定等[7]。但由于现场情况相对复杂,仍然需要进行大量的调试及实验工作。建立协调控制系统控制器参数与被控对象主要静态、动态参数之间的联系,明确控制器参数的物理意义,是提高调试效率降低调试风险的有效措施。针对亚临界机组“机跟炉”协调控制系统,研究一种依据对象模型直接求取控制器参数的方法。
1 对象模型简介
1.1 模型结构
文献[8]给出了一种经过验证的火电单元机组燃料量、汽轮机调阀开度对机前压力、发电负荷的模型。
式中:输入变量:uB为锅炉给煤量,t/h、uT为汽轮机高压缸进汽调节阀开度,%;输出变量:pt为机前压力,MPa、NE为发电功率,MW;中间变量:rm为进入磨煤机的煤量,t/h;rB为吹出磨煤机的煤量,t/h;pd为汽包压力,MPa;静态参数:K1为燃料增益、K2为压差拟合系数、K3为汽轮机增益;动态参数:τ为制粉过程迟延时间、Tf为制粉动态时间、Tt为汽轮机惯性时间;Cb为汽包蓄热系数。
1.2 对象实例
依据LPS电厂机组设计及运行数据确定模型参数,得到模型实例为
在MATLAB中SIMULINK环境下搭立对象模型,将变负荷工况下机组实际的燃料量、汽轮机调门开度信号作为输入,对比模型输出同机组实际的汽轮机前蒸汽压力、发电负荷信号,如图1所示[9-13]。

图1 对象模型验证曲线Fig.1 Verification curves of object model
在燃料量同汽轮机调阀开度均有较大幅度的变化的工况下,模型输出同实际信号变化趋势一致,机前压力最大偏差小于±0.5 MPa,发电负荷最大偏差小于±7 MW。表明模型具有良好的复现性,能够反映对象主要动态特性且具有足够的精度。
2 理论推导
2.1 模型线性化
对模型进行工作点模型线性化,机组负荷-压力的传递函数矩阵为[14]
(11)
将式(1)至式(5)写成增量形式。利用小偏差线性化得到工作点附近的线性模型,求取增量方程的拉氏变换,化简后得到系统传递函数,其中:
式中:uB0为工作点处的燃料量,t/h;uT0为工作点处的汽轮机调门开度,%。
“机跟炉”协调控制系统反馈回路结构如图2所示。典型特点是炉侧控制机组负荷,机侧控制机前压力。由于机侧被控对象惯性和迟延相对较小,可以保证机前压力的控制品质;而炉侧被控对象存在惯性大迟延,机组负荷控制品质相对较差。

图2 “机跟炉”协调控制系统结构示意图Fig.2 Structural schematic diagram of coordinated control system under turbine following boiler mode
2.2 简化及假设
PID控制系统具有较强的鲁棒性,被控对象结构或参数在一定范围内变化时,不会对控制品质造成明显影响。化简过程中涉及的近似及假设条件,包括:
(1)串联简化。一个小惯性环节同一大惯性环节串联时,可忽略小惯性环节的惯性项。
(2)并联简化。一个小惯性环节同一带有微分特性的大惯性大迟延环节并联时,可忽略带有微分特性的大惯性大迟延环节。
(3)简单对象闭环等效传递函数。被控对象为小惯性环节时,优化控制器参数可保证反馈值很好跟随设定值,其闭环等效传递函数近似为1。
(4)复杂对象闭环等效传递函数。被控对象包含大惯性、大迟延、非最小相位环节时,参照Smith预估控制,将被控对象分解为简单一阶惯性环节同复杂惯性迟延非最小相位环节的串联,闭环控制系统最终等效为简单环节的闭环控制回路同复杂环节的串联,当简单环节闭环等效传递函数等于1后,只剩余复杂惯性迟延非最小相位环节。简化过程如图3所示,图中Gc(s)为PID控制器,Gc′(s)为Smith控制器,Gp(s)为被控对象,Gp1(s)为被控对象中简单一阶惯性环节,Gp2(s)为被控对象中复杂惯性迟延非最小相位环节。
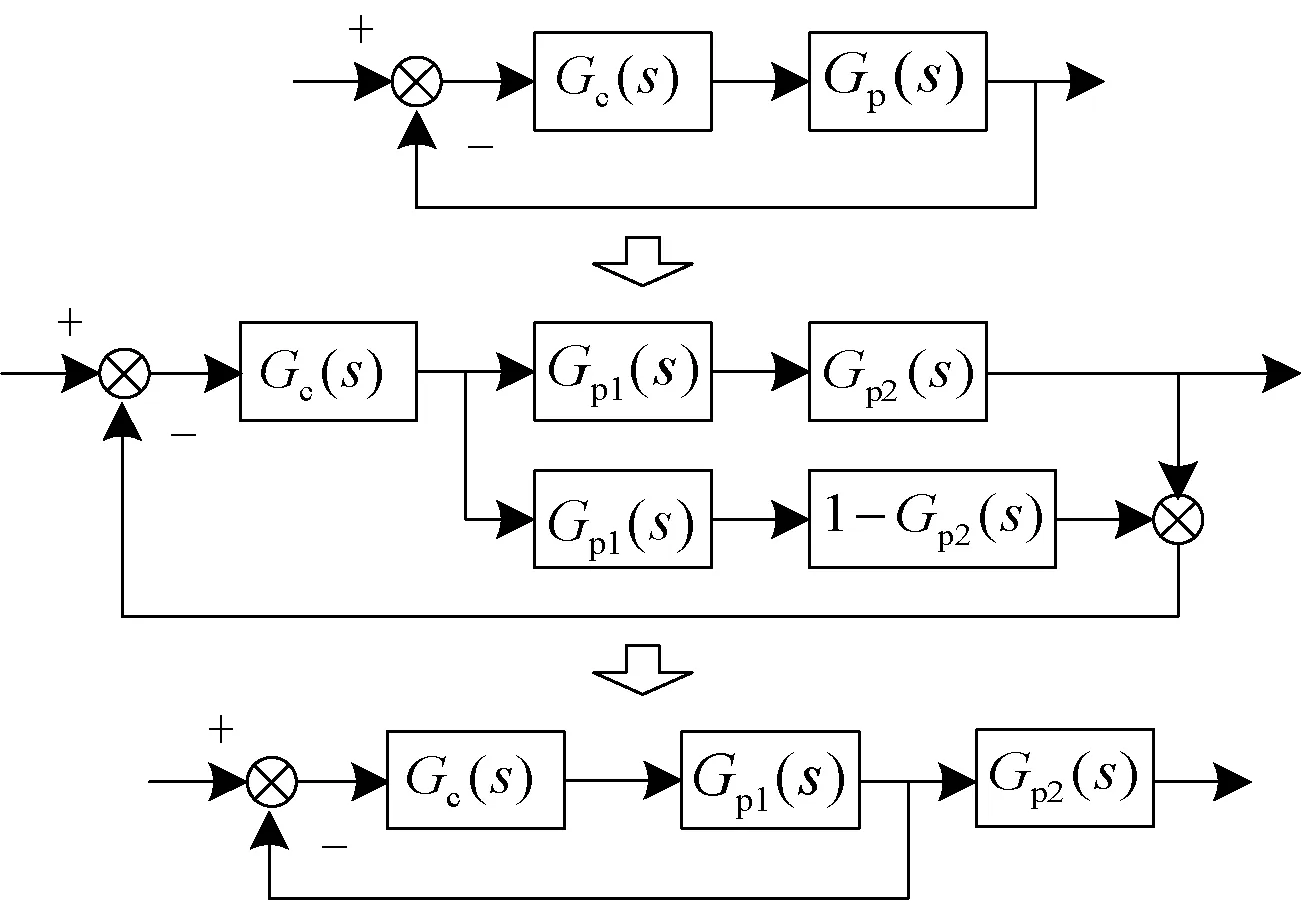
图3 复杂对象闭环等效传递函数简化过程示意图Fig.3 Schematic diagram of simplification process for closed-loop equivalent transfer function of complex object
2.3 机侧等效被控对象
将“机跟炉”协调控制系统机侧开环,求取汽轮机调阀开度对机前压力的传递函数,如图4所示。

图4 机侧开环“机跟炉”控制系统结构示意图Fig.4 Structural schematic diagram of turbine following boiler control system when turbine side is in open loop
令:
(16)
其中:
G21″(s)为简单惯性环节,而G21′(s)为复杂惯性迟延非最小相位环节。计算图4中输出uB(s)对输入NT(s)的传递函数:
(19)
根据近似条件,有
(20)
由式(16) ~ (20)可以推出
(21)
得到机侧等效被控对象为
(22)
分析GT(s),满足简化及假设条件中第(2)条。可以得到机侧等效被控对象近似为G12(s)。
2.4 炉侧等效被控制对象
将“机跟炉”协调控制系统机炉开环,求取燃料量对发电负荷的传递函数,如图5所示。

图5 炉侧开环“机跟炉”控制系统结构示意图Fig.5 Structural schematic diagram of turbine following boiler control system when boiler side is in open loop
根据近似条件,有
(23)
实际控制系统中,炉侧机侧双闭环会对推导过程产生影响,但可以利用机侧等效被控对象近似为G12(s)这一结论,结合式(23)推导得到图5中输出uT(s)对输入pB(s)的传递函数:
(24)
进一步得到炉侧等效被控对象为
(25)
2.5 控制器整定
工程上常使用的PID控制器包括关联型PID(经典型)和非关联型PID[15]。关联型PID控制器传递函数为
(26)
式中:Kp为比例系数;Ti为积分时间;Kd为微分增益系数;Td为实际微分环节的惯性时间。
对于典型惯性对象,PID控制器工程整定原则是:Kp取对象增益的倒数,小惯性对象可适当增强,大惯性对象则要适当减弱;Ti取对象的惯性时间;Kd与Td的乘积取对象惯性时间的1/3。
机侧控制器一般采用PI控制作用,由于对象惯性较小比例系数放大2倍,取
炉侧控制器一般采用PID控制作用:
“机跟炉”协调控制系统中,显然炉侧控制器参数更加难以整定。经过以上分析,式(29)~(30)直观地显示出了炉侧控制器参数与被控对象之间的对应关系。以此为基础,在获得对象模型的条件下,可以很容易地整定炉侧PID控制器参数。
3 仿真与调试
3.1 仿真验证
在MATLAB中SIMULINK环境下建立控制模型,对本文提出的“机跟炉”协调控制系统控制器参数整定方法进行验证[16-19]。模型采用LPS电厂100%负荷时的机组数据。
计算后的系统传递函数如下:
通过式(27)~(31)计算得到机炉侧控制器参数如下:
构建控制系统,进行仿真。其中图6为功率定值扰动曲线,图7为压力定值扰动曲线。当负荷指令以4.5 MW/min的速率变化30 MW时,实际负荷延迟120 s后开始跟随指令变化,跟随过程无超调无振荡,最大动态偏差16 MW,变负荷机前压力偏差小于0.1 MPa。当压力定值阶跃变化0.4 MPa时,实际压力快速跟随压力指令变化,响应曲线呈现略有超调的“大小波”的形式,衰减率和超调量能够满足要求,负荷最大动态偏差小于30 MW。

图6 功率定值扰动仿真曲线Fig.6 Simulation curves for disturbance of load set value
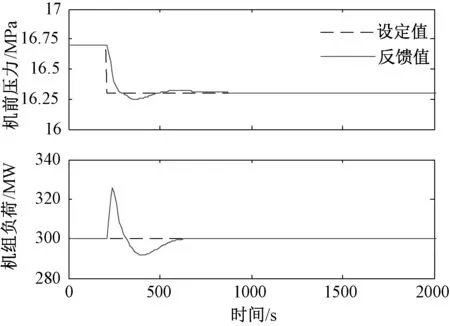
图7 压力定值扰动仿真曲线Fig.7 Simulation curves for disturbance of pressure set value

图8 LPS电厂实际运行曲线Fig.8 Real operation curves in the LPS thermal power plant
3.2 实际应用
LPS电厂330 MW机组协调控制系统包括炉跟机协调、机跟炉协调、炉基机基本4种运行方式。将此方法整定得到的机侧、炉侧控制器参数设置到实际控制系统中。机组实际运行过程中,发生一台磨煤机发生堵塞故障。图8显示故障时机组负荷、机前压力设定值和实际值变化曲线。机组升负荷过程中,磨煤机发生堵塞时,实际进入炉膛的燃料量减少,导致机前压力不正常地偏低;后由于一次风压升高磨煤机突然“吹通”,导致磨内大量煤粉突然进入炉膛,机前压力快速升高偏离设定值达到1.5 MPa(1 240 s处)。协调控制系统自动退出炉跟机协调方式切为机跟炉协调方式。这时机前压力快速变化以跟随压力定值,发电负荷出现一定扰动,但也开始缓慢跟随负荷定值,系统快速重新恢复到稳定状态,运行人员重新将协调控制系统投入炉跟机方式(1 440 s处)。
通过此次扰动证明,本文的“机跟炉”控制系统控制器参数整定方法能够满足现场要求,工程上切实可行。
4 结 论
依据工作点线性化后的火电机组简化非线性动态模型设计机跟炉协调控制系统,在满足工程实用的假设条件下,对控制系统进行化简得到机侧闭环情况下炉侧被控对象传递函数,并据此传递函数求得PID控制器参数,获得了很好的实际应用效果并由此得出结论:
(1)依据火电机组负荷-压力对象简化非线性动态模型直接求取“机跟炉”方式下协调控制系统控制器参数的方法理论上成立,工程上可行。
(2)研究揭示了协调控制系统控制器参数与被控制对象参数之间的对应变化规律。
[1] 吴玉平,王永龙.机跟炉协调控制在300MW CFB锅炉煤质大幅波动时的应用[J]. 中国电力,2008,12:42-45.
[2] WANG W,LI H X,ZHANG J T.Intelligence-based hybrid control for power plant boiler[J]. IEEE Transactions on Control Systems Technology,2002,10(2):280 - 287.
[3] 杨勇平,杨志平,徐钢,等.中国火力发电能耗状况及展望[J]. 中国电机工程学报,2013,33(23):1-11.
[4] 魏向国.优化控制系统PROFI在600MW火电机组中的应用[D].保定:华北电力大学,2012.
[5] 王爽心,杨辉,李亚光,等.协调控制系统神经网络PID优化控制与仿真研究[J].中国电机工程学报,2007,27(35):96-101.
[6] 孙灵芳,任栋,张玉恒,等.改进DRNN在单元机组协调控制系统参数整定中应用[J].电力自动化设备,2009,29(8):106-109.
[7] 沈炯,陈来九.基于智能解耦的协调控制系统参数自整定方法 [J]中国电机工程学报,1993,l3(4):13-19.
[8] 田亮.单元机组非线性动态模型的研究[D].保定:华北电力大学,2005.
[9] FLYNN M,MALLEY M.A drum boiler model for long term power system dynamic simulation[J].IEEE Transactions on Power Systems,1999,14(1):209-217.
[10] GAO L,DAI Y P.A New Linear Model of Fossil Fired Steam Unit for Power System Dynamic Analysis[J]. IEEE Transactions on Power Systems, 2011,26(4): 2390 - 2397.
[11] 刘吉臻,田亮,曾德良,等.660MW机组负荷-压力非线性特性的分析[J]. 动力工程,2005,25(4):533-536,540.
[12] 单英雷,陈洪刚,鲁叶茂,等.660 MW超临界火电机组建模与一次调频[J].华北电力大学学报,2015,42(2):97-103,110.
[13] 刘鑫屏,田亮,王琪,等.供热机组发电负荷-机前压力-抽汽压力简化非线性动态模型[J].动力工程学报,2014,34(2):115-121.
[14] 刘芳,田亮.凝结水节流参与机组发电负荷双重控制方案[J]. 华北电力大学学报,2014,41(2):66-71.
[15] 谢谢,曾德良,刘吉臻,等.基于遗传算法的协调控制系统鲁棒PID参数寻优[J].动力工程学报,2010,30(12):937-940,959.
[16] 项丹,刘吉臻,李露,等.基于非线性内模控制的直流炉机组协调控制系统设计[J].华北电力大学学报,2014,41(5):82-88.
[17] 刘鑫屏,田亮,秦治国.一种工程化的协调控制系统解耦控制方案[J].电力科学与工程,2014,32(1):74-78.
[18] 谷俊杰,冀乃良,曹晓威,等.超临界机组协调控制方法研究及模型分析[J].华北电力大学学报,2013,40(2):73-77.
[19] 江溢洋,王东风.基于改进逆向解耦的超超临界机组机炉协调控制[J].华北电力大学学报,2014,41(5):89-94.
Rules of Parameters Setting for Coordinated Control System Under Turbine Following Boiler Mode
WEI Danjing1,TIAN Liang1, BIAN Fang2, ZHANG Quan2
(1. School of Control and Computer Egineering, North China Electric Power University, Baoding 071003, China; 2.JingNeng KangBaShi Thermal Power Plant, Erdos 550002, China)
Coordinated control system in turbine following boiler mode of a thermal generator unit was adopted to maintain the key parameters, such as main steam pressure, stable in special conditions. This paper studied a method which uses simplified nonlinear dynamic model to calculate controller parameters. By linearizing the operation point of the model, combining the block diagram of turbine following boiler control system, the open-loop transfer function of generating power versus the fuel quantity of the boiler under closed-loop conditions of turbine side control loop was deduced. By simplifying the transfer function, the parameters of boiler side controller were calculated and the change rules of the controller parameters and controlled object parameters could be revealed intuitively. By debugging a 330 MW generator unit in the fault state, the authors found that the coordinated control system was switched to turbine following boiler mode from boiler following turbine mode. The experiment results show that the steam pressure can be maintained stable quickly and the generating load has no large disturbance. So the parameters gained by the method have enough accuracy.
coordinated control system;turbine following boiler mode;parameter setting;dynamic model
2015-12-13.
国家重点基础研究发展计划(973计划)资助项目(2012CB215203).
10.3969/j.ISSN.1007-2691.2016.06.14
TP273
A
1007-2691(2016)06-0091-06
卫丹靖(1992-),女,硕士研究生,研究方向为火电机组建模与控制。
