基于观测器的鲁棒故障重构设计及直流电动机仿真
2017-01-19聂成磊RonPatton
聂成磊, Ron J. Patton
(1.国家电网北京市电力公司发展策划部, 北京 100031,2.University of Hull Engineering Department, UK Hull HU6 7RX)
基于观测器的鲁棒故障重构设计及直流电动机仿真
聂成磊1, Ron J. Patton2
(1.国家电网北京市电力公司发展策划部, 北京 100031,2.University of Hull Engineering Department, UK Hull HU6 7RX)
提出了一种基于传统观测器设计理念的在线鲁棒系统故障重构的新方法。在观测器的设计过程中引入扰动抑制项,有效地降低了系统中存在的扰动或模型构造中的不确定项对系统故障的重构信号精度的影响。新的故障重构设计方案参数可通过利用线性矩阵不等式(LMIs)方法得出。在具有输入故障及外部扰动存在的前提下,将这种新提出的故障重构的方法与传统故障重构方法在同一直流电动机模型下进行Simulink仿真对比,结果表明,新的设计方法是完全可行的,相对传统故障重构方法具有对系统外部扰动及其他不确定项的强鲁棒性,故障重构信号有更高的精确度,动态性能明显改善。
故障重构;输入故障;鲁棒性;直流电动机
0 引 言
故障重构的方法是20年前由Wang and Daley(1996)[1]提出的,对故障重构的探索最早是从故障诊断理论演变而来,而对故障诊断的研究最早起源于20世纪70年代[2,3]。随着现代工业与科技的发展,人类对于系统故障的研究正在急迫性的上升,传统意义的故障诊断并不能提供足够的系统故障信息,从而在系统发生故障后不能及时有效地对故障和其产生原因加以分析,因此故障重构在现今的工业生产中起到越来越重要的角色,故障重构直接提供了系统的故障信息如:幅值大小和故障类型。同时,故障重构可以将多个系统故障信号相互独立并加以区分[4,5]。众多的优越性使得其吸引了越来越多的学者的研究兴趣[6-8]。
然而,由于系统中总是存在各种扰动与不确定参量,如:外部扰动,不可建模的动态子系统,时变参量等。如何在系统扰动存在下获得精确的故障信号便成为了进一步的研究目标,即故障重构过程中对于扰动与不确定参量的鲁棒性。故障诊断的鲁棒性最早被Patton,Frank and Clark[9]研究,Chen and Patton[10]更深入地研究了这一课题。之后,各种各样的针对输入信号故障重构的鲁棒性的讨论被广泛地展开[11-14]。
直流电动机做为主要的机电能量转化为电能量的装置,广泛地运用于农业、交通运输、国防、航空航天、机械工业、电力工业等领域。直流电动机具有调速特性好、能承受频繁冲击负载、过载能力强、能实现频繁快速启动制动以及逆向旋转等优越性,使其在当前“以交代直”的发展趋势中仍然在传动领域,尤其是在调速性能要求很高的系统中占有极其重要的地位[15]。在其基础上的故障诊断与故障重构的研究也被广泛地展开[16-18]。本文就是将鲁棒性的故障重构方法应用于直流电动机模型上,如图1所示,并对模型进行仿真验证。
1 鲁棒故障估计观测器
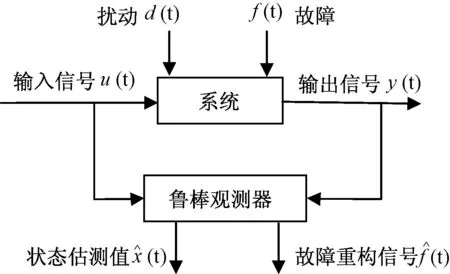
图1 故障重构流程图Fig.1 Structure of fault estimation
一个含有输入故障和外部扰动的系统的线性时不变状态方程表达式如下



如果满足以上假设1,假设2两个假设条件,那么一个基于输出信息的全阶状态观测器可以设计为

(3)
(4)

(5)
ey(t)=Ce(t)
(6)

(7)

定理1:在假设1~2 的条件下,如果存在实斜对称矩阵P∈Rn×n,R∈Rn×n,Y∈Rn×p,F1∈Rq×p,F2∈Rr×p, 使得下面的条件成立:
PA-YC+ATP-CTYT=-R<0,
(8)
BfTP=F1C
(9)
ETP=F2C
(10)
其中Y=PL。那么存在具有鲁棒性的全状态观测器(3),(4),(7)使得当时间t趋于无穷时,系统的状态估计值和故障估计值渐进趋系统状态量和系统故障的实际值。其中
(11)
式中:G∈Rq×q是待设计矩阵,G-1为矩阵G的逆矩阵; τ为一个小的正实数。
证明:考虑一个Lyapunov方程
(12)
在式(12)求导并将式(4),(5)带入可得
(13)
引入引理1:[19]如果已知一个标量a>0和一个对称正定矩阵Q∈Rn×n, 那么下列不等式成立:
(14)
那么根据引理1,可以得到不等式
(15)
式(15)中a为一个可设计正实数。根据式(7)和不等式(15),式(13)变化为
(16)

(17)

(18)

(19)
(20)

(21)

注意1:对于单输入系统此时Bf=B,在设计观测器的过程中可以用矩阵B直接代替矩阵Bf,对于多输入系统,故障可能存在于多个输入信号中,这时,矩阵Bf为矩阵B的线性子空间。
注意2:此设计过程中的难点在于在条件(9),(10)同时存在下求解不等式(8),针对这个问题,可以转化为下面的最优求解问题[8,20]。即求解下面的两个线性矩阵不等式最小化J同时使不等式(8)成立:
通过同时求解不等式组(8),(22),(23)可以得到相应的矩阵F1,F2,P, Y。继而得到观测器的增益矩阵L=P-1Y,其中P-1是正定矩阵P的逆矩阵。
2 模型结构
直流电动机被广泛的应用在工业和民用设备中。对于电动机的转速的控制有着高精度的要求。对于直流电动机的建模有许多种类,本文选取的模型[21]的状态空间表达式如下:
式中:Ea(t)为端电压,V;Ia(t)为电枢电流,A;ωa(t)为电动机轴与负载的转速,rad/s;Ra为电枢电阻,Ohm;La为电枢电抗,H;Ja为电动机转子和负载的转动惯量,kg.m2/s2;Ka为扭矩系数,Nm/Amp;Ba为机械系统阻尼系数,Nms。
式(25)中y为系统的输出量。定义矩阵组
当系统有故障发生与外部扰动存在时,又因为此系统为单输入系统Bf=B。因此最终得到的故障系统表达式标准形式为
(26)
y(t)=Cx(t)
(27)
由于本文重点在于讨论故障重构的方法,因此控制器的设计在此并不过多冗述,其设计方法有许多种,并将会在今后的研究中加以说明。本文中采用极点配置方法设计控制器,控制器数学表达式为且相应的极点选为(P1=-4.2,P2=-4.4)
(28)
3 仿真结果与分析
对于系统输入故障的时间特性种类大至可分为3种[22],如图2所示。
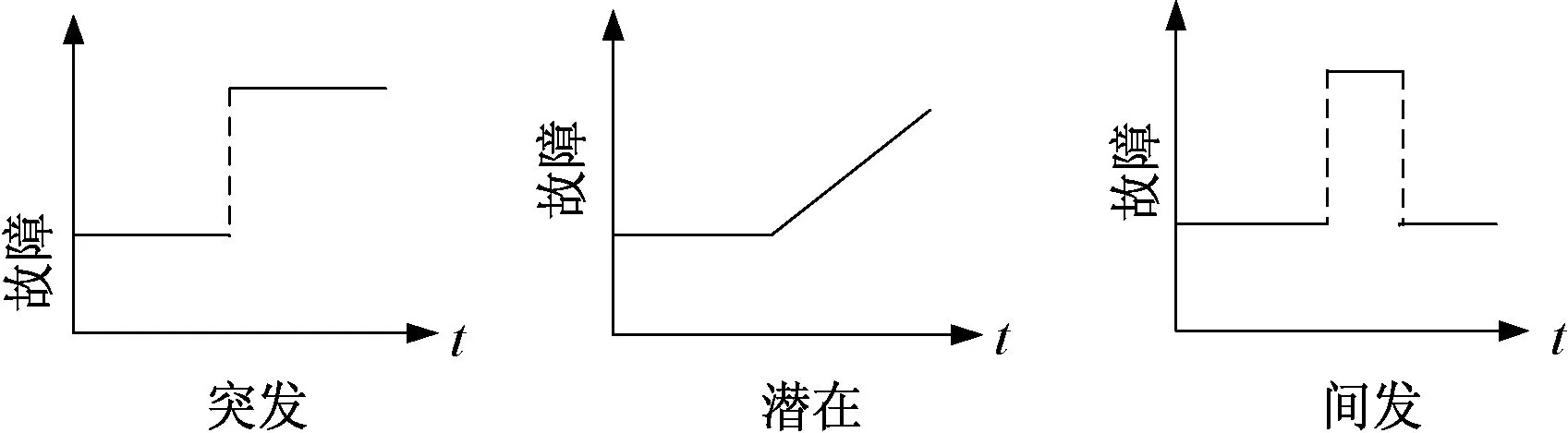
图2 突发故障, 潜在故障和间发故障Fig.2 Abrupt fault, incipient fault and intermittent fault
为说明本文所设计方法的正确,使用MatLab 环境下的Simulink对所建系统模型进行仿真。所选参数如表1所示。
为了验证其通用性,仿真中故障模型选用为
(29)

表1 直流电动机仿真参数
求解得到下列结果:
图3中所表示的是本文所提出的具有鲁棒性的故障重构方法与相同直流电动机模型下的真实输入故障与其重构信号的状态响应曲线,其中学习率W=20。
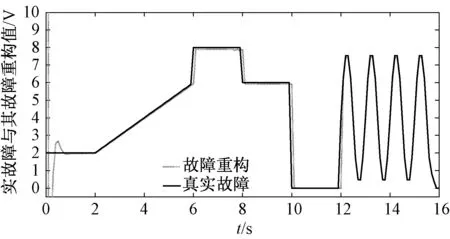
图3 系统输入故障和其重构值的动态响应比较Fig.3 Response of input fault and its estimation
图3表明本文所提出的方法能使故障重构信号有效且精确地跟踪系统故障信号。
图4中所表示的是传统故障重构方法[1]在此直流电动机模型下的真实输入故障与其重构信号的状态响应曲线。
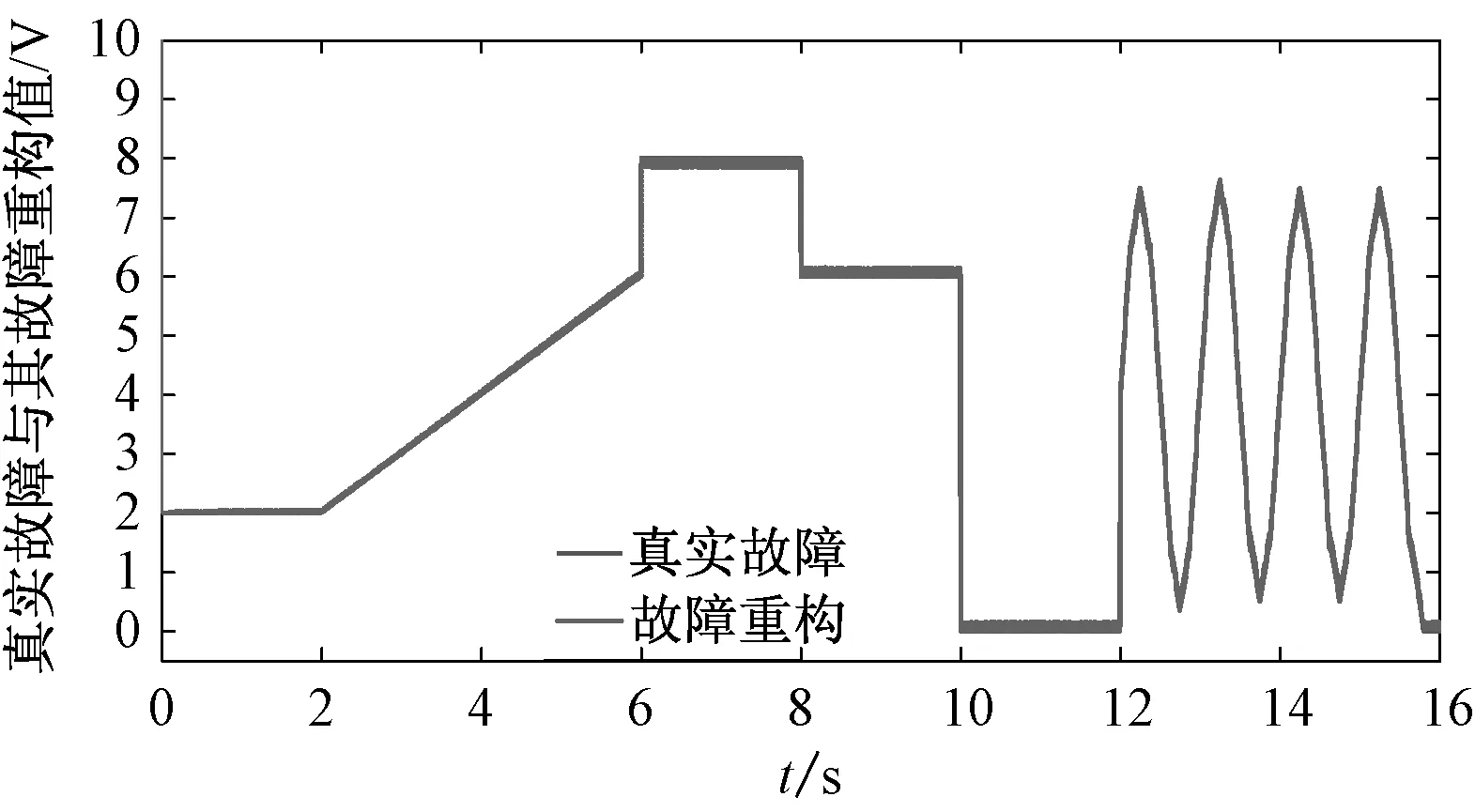
图4 系统真实故障和其重构值动态响应比较Fig.4 Response of input fault and its estimation
图4表明传统故障重构方法在扰动信号的存在下,故障重构信号状态响应在追踪故障信号状态响应时伴有强烈的振动存在。由图3与图4结果可以看出,系统外部扰动严重影响传统故障重构方法所得到的故障重构的精确性,从另一方面说明本文所提出的故障重构的方法具有对扰动的抑制能力,具有很好的鲁棒性,其动态特性是满意的。此处应当着重提出一点,即对于本文所提出的观测器(1)、(2)可以同时得到系统状态量,系统故障的重构值或观测值,而且对于外部扰动具有鲁棒性。
4 结 论
本文提出了一种新的基于观测器的在线鲁棒系统故障的重构方法,相对于传统的系统观测器,这种方法加入了一个具有抑制系统外部扰动的非线性项,其作用为在存在系统外部扰动的情况下保证了系统输入故障重构值的精确性。通过将其运用在直流电动机模型得出仿真结果,并与传统故障重构的方法进行比较得出:本文所提出的基于观测器的鲁棒故障重构方法对系统外部故障具有优良的鲁棒性。当前越来越多的研究重点已经向容错控制转变[23,24], 故障重构能提供系统故障的众多信息,可以为系统容错控制提供强大的基础,已经成为容错控制设计方法过程中不可缺少的一部分。在航天,工业生产,电力传输,都具有巨大的工业应用潜力,由于大量的外部扰动与系统故障总是同时存在的,因此,未来的工作会更加深入到鲁棒容错控制的研究中。
[1] WANG, H, DALEY, S. Actuator Fault Diagnosis: An Adaptive Observer-Based Technique[J]. IEEE Transactions on Automatic Control, 1996, 41(7):1073-1078.
[2] BEARD R V. Failure accomodation in linear systems through self reorganization[D]. Massachusetts Institute of Technology, 1971.
[3] WILLSKY A S. A survey of design methods for failure detection in dynamic systems[J]. Automatica, 1976, 12(6):601-611.
[4] BEREC L. A multi-model method to fault detection and diagnosis: Bayesian solution. An introductory treatise[J]. International Journal of Adaptive Control and Signal Processing, 1998, 12(1):81-92.
[5] MENKE T E, MAYBECK P S. Sensor/actuator failure detection in the vista F-16 by multiple model adaptive estimation[J]. IEEE transactions on Aerospace and Electronic Systems, 1998,31 (4), 1218-1229.
[6] NGUANG S K, ZHANG P, DING S X. Parity relation based fault estimation for nonlinear systems: An LMI Approach[J]. International Journal of Automation and Computing, 2007, 4(2): 164-168.
[7] ZHANG KE, JIANG BIN , SHI PENG. Observer-based integrated robust fault estimation and accommodation design for discrete-time systems[J]. International Journal of Control, 2010, 83(6):1167-1181.
[8] ZHANG K, JIANG B, COCQUEMPOT V. Adaptive Observer-based Fast Fault Estimation[J]. International Journal of Control Automation and Systems, 2008, 33(9):320-326.
[9] PATTON R J, FRANK P M, CLARKE R N. Fault Diagnosis in Dynamic System: Theory and Applications[M].Englewood Cliffs,NJ:Prentice Hall,1989.
[10] CHEN J, PATTON R J. Robust model-based fault diagnosis for dynamic systems[M]. Norwell, MS: Kluwer Academic Publishers,1989.
[11] EDWARDS C, SPURGEON S K, PATTON R J.Sliding mode observers for fault detection and isolation[J].Automatica, 2000, 36(4): 541-553.
[12] FLOQUET T, EDWARDS C, SPURGEON S K. On sliding mode observers for systems with unknown inputs[J].International Journal of Adaptive Control and Signal Process,2007,21(8-9):638-656.
[13] CHEN W, SAIF M. An iterative learning observer for fault detection and accommodation in nonlinear time-delay systems[J]. International Journal of Robust and Nonlinear Control, 2006, 16(1):1-19.
[14] LIU H Y, DUAN Z S. Actuator fault estimation using direct reconstruction approach for linear multivariable systems (Brief Papers)[J]. Iet Control Theory & Applications, 2012,6(1):141-148.
[15] 刘小明, 刘振兴. 直流电动机的故障检测和诊断技术综述[J]. 微电机, 2010, 43(1):86-90.
[16] 刘曼兰, 寇宝泉, 崔淑梅. 永磁直流电动机故障检测与智能诊断装置[J]. 微特电机, 2005, 33(9):19-20.
[17] 沈标正, 马竹梧. 直流电机故障诊断专家系统[J]. 冶金自动化, 2003, 27(1):16-19.
[18] 朱新宇, 袁璐, 宋华. 基于模糊观测器的直流电动机故障诊断[J]. 导弹与航天运载技术, 2007,(6):57-60.
[19] JIANG Bin , WANG Jian Liang , SOH Yeng Chai. An adaptive technique for robust diagnosis of faults with independent effects on system outputs[J]. International Journal of Control, 2002, 75(11):792-802.
[20] CORLESS M, JAY T U. State and Input Estimation for a Class of Uncertain Systems [J]. Automatica, 1998, 34(6):757-764.
[21] KOSHKOUEI A J, BURNHAM K J, KOSHKOUEI A J, et al. Control Of Dc Motors Using Proportional Integral Sliding Mode[C]. Proceeding of IMECS,Hongkong,2009:1286-1290.
[22] NIE C L. Observer-based Robust Fault Estimation for Fault-Tolerant Control[D].UK:University of Hull,2012.
[23] PATTON R J, CHEN J. Observer-based fault detection and isolation: Robustness and applications[J]. Control Engineering Practice, 1997, 5(5):671-682.
[24] BLANKE M, KINNAERT M, LUNZE J, et al. Diagnosis and Fault-Tolerant Control[M]. Berlin:Springer-Verlag, 2003.
Observer-based Robust Fault Estimation and DC Motor Simulation
NIE Chenglei1, Ron J. Patton2
(1. State Grid Corporation of China, Department of Development and Technology of Beijing Electric Power Company, Beijing 100031,China; 2. University of Hull Engineering Department, UK Hull HU6 7RX)
In this paper, a novel approach to on-line Robust Fault Estimation is presented which is based on the design concept of conventional observer. One anti-disturbance item is added to the observer design, which can effectively reduce the influence of disturbance and other uncertainty on the accuracy of the fault estimate signals. The novel method design parameters can be obtained by Linear Matrix Inequalities (LMIs). Simulink simulated comparison was done between the proposed estimation method and the traditional one under the circumstance of input fault and outside disturbance. The results verify the feasibility of the proposed method which enjoys greater robustness towards outside disturbance and other uncertainty than the traditional method. And the proposed method has higher accuracy of signal and the dynamic features can be improved obviously.
fault estimation; input fault; robustness; DC motors
2016-03-05.
10.3969/j.ISSN.1007-2691.2016.06.11
TP273
A
1007-2691(2016)06-0068-06
聂成磊(1985-),男,工程师,主要研究方向为基于观测器的鲁棒故障重构、鲁棒容错控制;RonJ.Patton (1949-), 男,教授,主要研究方向为鲁棒多模型容错控制、鲁棒分布式容错控制等。
