基于模型预测控制的多约束火星精确着陆制导律研究
2017-01-18王汀郭延宁张瑶马广富
王汀,郭延宁,张瑶,马广富
(哈尔滨工业大学 控制工程系,哈尔滨 150001)
基于模型预测控制的多约束火星精确着陆制导律研究
王汀,郭延宁,张瑶,马广富
(哈尔滨工业大学 控制工程系,哈尔滨 150001)
主要研究了火星着陆动力下降段考虑燃料消耗和实际任务约束条件的制导律设计问题。选取可变推力发动机作为执行机构,首先建立了着陆器在动力下降段的运动方程及质量变化方程;其次对实际任务中需要考虑的斜坡、推力幅值和方向等约束条件建立了约束模型;接下来通过构造由控制量和状态量构成的性能指标,提出一种基于模型预测控制的多约束火星精确着陆制导算法。可实现多种约束条件下的指标最优精确着陆任务。最后,通过数值仿真对比了本文与已有典型着陆策略,验证了所提算法可以在满足约束条件的前提下有效地完成既定火星精确着陆任务。
精确着陆;动力下降段;模型预测控制;几何约束
0 引 言
随着科学水平的不断发展,世界各国都将目光放到了遥远的外太空并制定了各自的探索计划[1-2]。火星作为地球的近邻有着与地球相似的环境,因此成为了行星探测的主要目标。自1957年第一颗人造卫星成功发射后3年,美国和苏联便开始了火星探索计划,至今的几十年内其他国家也加入了探索火星的行列,我国也制定了2020年左右实现火星“绕、落、巡”一步走的计划[3-4]。由于火星着陆任务存在着对着陆地点环境的要求与资源丰富地区探索的限定,实现快速且高效的定点着陆在当今及未来的着陆任务中扮演着越来越重要的角色[5-7]。
经过探测任务的相继实施以及控制理论的不断完善,针对动力下降段的制导与控制方法已经十分丰富。基于二次多项式的“阿波罗制导方案”是最早应用于实际任务的方法[8],其主要思想是根据当前状态及给定着陆点和着陆时间计算出一条参考轨迹。该方法物理意义明确,可靠性高,但不够灵活,未能考虑着陆过程多种约束条件和性能指标。McInnes设计了非线性反馈控制律以实现闭环重力转弯[9]。该方法没有考虑燃料消耗的优化并且很难应用到实际任务中。Battin针对轨道控制问题提出了一种最优中断状态向量控制方法,可以直接补偿未知干扰重力加速度[10]。D’Souza在均匀重力场中检验了最优控制算法并且计算出了最优剩余飞行时间[11]。Acikmese和Ploen针对考虑复杂约束的燃料最优火星着陆问题设计了一种离线凸优化方法[12]。该方法可以以很小的着陆误差解决没有可行着陆轨迹的问题,但由于其自身的开环特性,不适用于自主着陆任务中。Guo提出了一种考虑不同约束的路径点优化方法[13]。该方法通过在末尾使用ZEM/ZEV制导律可以得到与开环燃料最优控制相近的结果。Furfaro将强化学习方法应用于多滑模火星着陆参数选取中,这种方法虽然在参数选取方面更为自主但却需要很复杂的学习过程[14]。
综上,已有的火星精确着陆的研究中,开环优化在解决多种着陆约束和性能优化方面性能最优,但实际使用价值受当前计算能力限制。而已有的闭环反馈制导往往难以处理障碍规避、控制受限约束等难点问题。基于此,本文提出了一种基于模型预测控制的多约束反馈制导律。这是一种主要考虑避障和控制受限等非线性约束的在线优化方法,该方法可在每个预测时域中进行优化算出当前时刻的控制量,最终实现着陆器的软着陆。
1 着陆器动力学方程
忽略气动阻力及模型不确定性等因素,火星着陆器在动力下降段的平动动力学方程可以表示为
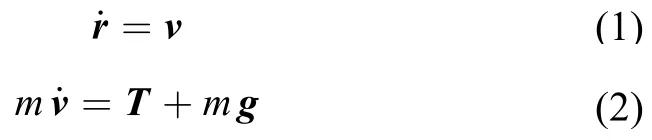
其中:r和v分别为着陆器的位置矢量和速度矢量;T为发动机的推力矢量;m为当前时刻着陆器的质量;g为重力加速度矢量。在本文中,以上矢量均为表示在以火星着陆点为原点的非旋转惯性坐标系中的3维列向量。
着陆器的质量变化由发动机燃料消耗方程来描述

2 着陆过程约束条件描述
为了更加准确地模拟着陆器在动力下降段的实际情况并且保证其安全、精确着陆,本节中将依次给出若干动力下降段需要考虑的约束条件。
2.1 斜坡约束
为防止着陆器在着陆过程中与地面突起的障碍碰撞,着陆器的着陆轨迹应该保证在设定的圆锥中。斜坡约束可以定义如下:顶点为预定着陆点,以着陆点为起点的垂直向上单位矢量zu为中心轴的圆锥,如图1所示。若利用数学方程来描述斜坡约束,则可以将约束条件转换为令着陆器位置矢量r与垂直向上单位矢量zu间夹角小于圆锥的顶角α,即

图1 斜坡约束Fig.1 Glide slope constraint

式中:r和zu分别为与着陆点固连坐标系中的着陆器位置矢量和垂直向上单位矢量,α为给定斜坡角。不失一般性,假设斜坡约束顶角α的范围为0≤α≤90°。
2.2 发动机推力方向约束
由于发动机安装在着陆器主体的特定位置,推力的方向不能为任意方向。推力方向约束如图 2所示,从图中可知若要满足该约束需令发动机喷射方向即推力反方向-T与向下单位矢量zd间的夹角小于给定角度最大值β。对应数学表达式为

图2 推力方向约束Fig.2 Thrust direction constraint

不失一般性,假设推力方向约束最大值β的范围为-90°≤β≤90°。
2.3 推力幅值约束
由于着陆器一般配置有限推力发动机,其所能提供的推力幅值存在上限。对应推力幅值约束可表示为

其中:T为推力幅值;Tmax为最大推力幅值。
2.4 安全高度约束
斜坡约束可以保证着陆器着陆时到达预定位置,但由于有限推力发动机所能提供的推力存在上限,即使提供最大推力,以上约束不能保证着陆器着陆时的速度为零,即无法满足软着陆的条件。因此着陆器当前时刻z轴的速度与当前的高度间应存在一个约束保证着陆器不会坠地,该约束可表示为

其中:Tmax为最大推力幅值;m为当前时刻着陆器质量;分别为着陆器在轴方向上的位置分量和速度分量;g0为火星重力加速度的大小。
值得注意的是,虽然该约束计算时采用的是当前时刻的质量,将其视为常数,但在着陆过程中,质量是逐渐减小的,因此利用该公式具有更高的保守性。
3 动力下降段数学模型
在本节中,基于之前所述的着陆器动力学方程和非线性约束,描述了着陆器动力下降段导航问题。该问题包含了待优化的性能指标、着陆器运动学方程、非线性约束条件和状态量的幅值约束。建立由状态和控制量构成的性能指标如下

其中:tf为飞行时间;Q和R分别为状态量和控制量的权重;r和v分别为着陆器的位置矢量和速度矢量;T为发动机的推力矢量。
动力学方程为

约束条件为

状态量幅值约束为

其中:ri和vi分别为着陆器的三轴位置分量和速度分量;χr和χv分别为位置分量上限和速度分量上限。
非线性动态系统可以进一步写成简化形式。首先将连续时间动力学方程(1)和(2)以采样间隔Δt离散化

定义新的状态变量和控制变量

利用新定义的状态与控制量可以将式(12)和式(13)整合成

公式(16)可以进一步化简为

需要说明的一点是,由于矩阵M(t)的左上、左下和右下子块部分始终是可逆的,因此M(t)-1始终是存在的。
4 基于模型预测控制的着陆制导律
模型预测控制(MPC)是一种利用当前时刻状态作为初始状态,在一段固定时间内的每个采样时间求解最优控制问题以得到当前控制量的控制方法。优化的目的是求取一组最优的控制序列并采用序列中的第一项作为当前时刻的控制量。然后将控制量施加给系统后得到的下一时刻的状态作为初始状态并且在相同的时间长度内进行迭代计算,这样的闭环可以起到有效补偿不确定性和干扰的反馈作用。在每步迭代中,系统模型是随时间变化的,这样可以保证与实际着陆情形具有很小的偏差。
4.1 模型预测控制算法
针对上节提出的数学模型,采用模型预测控制律来产生分段光滑的常值控制。假设每步预测时间长度为N,则在一次迭代中下一时刻的预测状态为

其中:A2,B2和C2为在每次迭代中A2(t),B2(t)和C2(t)在当前时刻的值;分别为一次预测时域中第i步的状态向量和控制向量;为第i+1步的预测状态。为简化方程形式,在下面的推导中将忽略t。
为了更为方便地计算每次预测中的状态序列与控制序列,可以把每次预测时域中所有步的状态量和控制量整合为新的状态量X和控制量U

则可将式(20)改写为

利用新的状态量和控制量式(21),性能指标式(9)可以改写为

其中:Q′和R′为状态量和控制量的权重。
非线性约束条件式(5)~(8)和边界条件式(9)与式(10)可以改写为

其中:χx和χu为新的状态量与控制量边界条件;N为预测时域;Ms,Mv和Mr为约束条件的相关系数矩阵。
由于实际着陆任务的剩余飞行时间逐渐减少,若其小于模型预测周期,则本文的性能指标将失去价值。因此,根据文献[15],采用如下公式计算剩余飞行时间
该方程的唯一正实解即为剩余飞行时间,式中:v和r分别为着陆器的速度矢量和位置矢量;g为海平面重力加速度矢量;tgo为着陆器距离完成着陆任务的剩余飞行时间。
4.2 模型预测控制流程
利用模型预测控制方法实现火星精确着陆任务的完整计算步骤可以用图 3的流程图来表示。

图3 模型预测控制算法流程图Fig.3 Flowchart of model predictive control algorithm
1)在亚音速降落伞进入阶段的末段选取合适的着陆地点。
2)利用着陆器的位置矢量和速度矢量带入方程(32)求解参考的剩余飞行时间。如果剩余飞行时间小于预先设定的预测时域N,则将预测时域设为剩余飞行时间,否则保持预测时域不变。
3)利用着陆器当前的状态根据式(17)、(18)和式(23)计算本次预测时域内的系统方程矩阵A3、B3和C3。
4)利用优化软件计算出在本次预测时域内满足约束条件并使性能指标J最小的控制序列。
5)将控制序列中的第一项控制量作为实际控制施加给系统。
6)跳转到第二步开始循环直到着陆器在预先选定的着陆地点完成软着陆。
5 数学仿真结果与分析
不失一般性,为验证本文所提出的MPC方法的正确性和高效性,在本节中给出了考虑约束的火星自主精确着陆问题的数学仿真。MPC算法是利用MATLAB中的fmincon函数求解控制量的,其中函数采用默认设置。
着陆点选取在参考坐标系的原点,实现软着陆要求着陆器的终端速度与终端位置为零。假设系统的状态为可测并且不存在测量误差。火星着陆器的初始参数在表 1中给出。

表1 火星着陆器参数Table 1 Mars lander parameters
系统的非线性约束和状态界限约束的参数在表 2中给出。
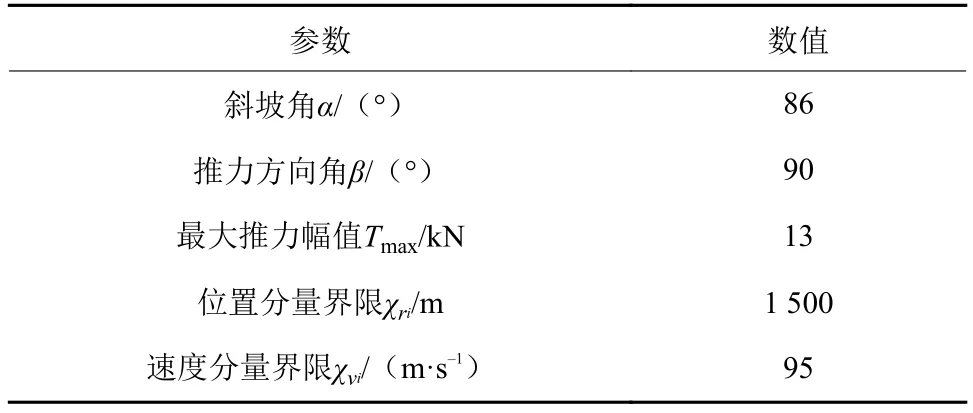
表2 约束及状态界限参数Table 2 Constraints and state bounds parameters
在仿真中,采样时间间隔为Δt=1,预测时域设为8。值得注意的是状态量与控制量的加权矩阵Q′和R′的选取十分重要,因为它们可以避免由状态量与控制量量级差异带来的舍入误差,其选取相当于对2个量进行无量纲化处理。图 4~7分别为针对考虑所有前述非线性约束和边界约束情况下的火星定点精确着陆问题采用本文提出的模型预测控制律所得出的着陆器的位置、速度、发动机推力和质量变化曲线。
由图 4可知着陆器的终端位置为与地面固连坐标系的原点,说明着陆器在动力下降段末端精确的着陆在预定的着陆地点。
由图 5可知着陆器的终端速度为零,说明着陆器在90 s时实现了软着陆。

图4 火星着陆器位置变化曲线Fig.4 Position of Mars lander

图5 火星着陆器速度变化曲线Fig.5 Velocity of Mars lander

图6 火星着陆器推力变化曲线Fig.6 Thrust of Mars lander

图7 推力幅值变化曲线Fig.7 Magnitude of thrust
图6为着陆器在着陆过程中的推力曲线,其中小的尖峰是由约束条件引起的,从图中可知x、y轴的推力在末端时刻已经为零而z轴始终存在推力,这是由于重力加速度的存在而引起的,若着陆器的位置为零可以采用关闭发动机的方法实现着陆。值得说明的是速度曲线5和有限推力发动机推力曲线6在着陆末端的突变是由权重矩阵Q′和R′的切换造成的,其目的是加快收敛速度同时达到节省燃料的目的。
图7为在整个着陆阶段发动机提供的推力幅值变化曲线,从图中可知整个过程的推力幅值小于预先设定的最大发动机推力幅值Tmax,这说明所提的发动机推力幅值约束得到满足。同时从图中可以更为明显地看出由约束造成的小尖峰以及由参数切换带来的突变。
由图 8可以计算出在整个着陆过程中的燃料消耗为Δm=391 kg。与文献[16]进行对比可知采用本文所提的模型预测控制律比阿波罗二项式制导律消耗的燃料要少。虽然燃料消耗比最优制导律多,但是本文考虑的约束更为贴近实际着陆情况,这是最优制导律无法实现的。

图8 火星着陆器质量变化曲线Fig.8 Mass of Mars lander
图9为火星着陆器在整个动力下降段过程中的三维轨迹曲线,从图中可以看出在整个着陆过程中探测器满足所述的非线性约束以及状态界限约束。

图9 火星着陆器精确着陆飞行轨迹Fig.9 Overall trajectory of Mars lander’s pinpoint landing
为了证明所提斜坡约束的作用,我们也针对无斜坡约束而其他参数保持不变的情形进行了仿真,如图 10所示。
从图中可以看出在这种情况下,着陆器在22.7 s时坠地,这在实际任务中是不允许的。从图 11中可以更明显地看出斜坡约束的作用,这说明本文所施加的斜坡约束是正确且必要的,可以保证着陆器的安全着陆。

图10 无斜坡约束条件下火星着陆器位置变化曲线Fig.10 Position of Mars lander(without glide slope constraint)

图11 有无斜坡约束条件比较Fig.11 With or without glide slope constraint comparasion
为了研究预测时域的作用,每次仅改变预测时域而保持其他参数不变,进行了一系列仿真,仿真结果如表3所示。

表3 不同预测时域情况下仿真结果比较Table 3 Different prediction horizon results comparison
从表3中可以看出,随着预测时域的增加,着陆时间与燃料消耗均逐步减少,看似可以得出更大的预测时域,带来更快的收敛时间以及更少的燃料消耗的结论。然而,预测时域的增加不仅会加大计算量及计算时间,而且由于模型预测控制的工作机理为在一次预测时域中将系统的参数视为不变的常数,这会导致所得的控制量与实际所需控制量有偏差,因此大的预测时域并不一定会带来一个更好的控制效果,具体的选取要根据实际系统情况决定。
6 结 论
本文针对非线性约束存在情况下的火星精确着陆任务的动力下降段提出了一种模型预测控制算法。针对不同情形进行的数学仿真结果证明了所提MPC制导律可以考虑斜坡约束、推力方向幅值约束等多种约束,可以实现避障并具有能量近似最优特性。本文提出的MPC控制律不仅可以应用于火星着陆也可以应用到各种类似的轨道转移问题中。
[1]李莎,宁远明.国外火星着陆探测任务失败的启示[J].中国航天,2015(6):25-28.Li S,Ning M Y.Enlightenment from the failure of Mars landing mission abroad [J].Aerospace China,2015(6):25-28.
[2]张雪松.积跬步以至千万里——美国的新载人火星探测计划[J].太空探索,2015(8):30-33.Zhang X S.Step by step and even thousands of miles--America’s new manned Mars exploration program [J].Space Exploration,2015(8):30-33.
[3]侯建文,周杰.“火星科学实验室”巡航段导航、制导与控制[J].深空探测学报,2014,1(2):110-116.Hou J W,Zhou J.Navigation,guidance and control of the “Mars Science Laboratory” [J].Journal of Deep Space Exploration,2014,1(2):110-116.
[4]周武,薛滔,郑永春.欧阳自远:我国火星探测应高起点发展[J].太空探索,2015(3):10-17.Zhou W,Xue T,Zheng Y C.Ouyang Ziyuan:China’s Mars exploration should develop with a high starting point[J].Space Exploration,2015(3):10-17.
[5]Elias A M,Navin M S,Lethakumari R.Path constrained explicit guidance algorithm for lunar pinpoint landing mission[C]//Control Communication & Computing Conference.Trivandrum:[s.n.],2005.
[6]Chen R,Xia Y.Drag-based entry guidance for mars pinpoint landing[C]//China Control Conference.Xi’an,China:[s.n.],2013.
[7]崔平远,胡海静,朱圣英.火星精确着陆制导问题分析与展望[J].宇航学报,2014,35(3):245-253.Cui P Y,Hu H J,Ju S Y.Analysis and prospect of guidance aspects for mars precision landing[J].Journal of Astronautics,2014, 35(3):245-253.
[8]Klumpp A R.Apollo lunar-descent guidance[R].Charles Stark Draper Laboratory,R-695,1971.
[9]Colin R.McInnes.Gravity-turn descent from low circular orbit conditions[J].Guidance,2002(26):183-185.
[10]Battin R H.An introduction to the mathematics and methods of astrodynamics [M].New York:AIAA,1987.
[11]D’Souza C N.An optimal guidance law for planetary landing[C]//Proceedings of the AIAA Guidance,Navigation and Control Conference.New Orleans,USA:AIAA,1997.
[12]Acikmese B,Ploen S R.Convex programming approach to powered descent guidance for Mars landing [J].Journalof Guidance,Control,and Dynamics,2007,30(5):1353-1366.
[13]郭延宁,于彦波,马广富.基于路径点优化的火星着陆器动力下降段反馈制导律研究[C]//中国宇航学会深空探测技术专业委员会第九届学术年会论文集(上册).北京:JDSE,2012.
[14]Roberto F,Wibber D R.Terminal multiple surface sliding guidance for planetary landing:development,tuning and optimization via reinforcement learning [J].Journal of Astronautical Sciences,2015(62):73-99.
[15]GuoY N,Hawkins M,Wie B.Waypoint-optimized zero-effortmiss/zero-effort-velocity feedback guidance for Mars landing [J].Automatica,1993,29(6):1603-1605.
[16]于彦波.火星探测器动力下降段制导律研究 [D].哈尔滨:哈尔滨工业大学,2013.Yu Y B.Study on powered descent guidance for Mars landing [D].Harbin:Harbin Institute of Technology,2013.
通信地址:哈尔滨工业大学327信箱(150001)
电话:(0451)86413411
E-mail:guoyn@hit.edu.cn
Model Predictive Control Guidance for Constrained Mars Pinpoint Landing
WANG Ting,GUO Yanning,ZHANG Yao,MA Guangfu
(Department of Control Engineering,Harbin Institute of Technology,Harbin 150001,China)
This paper investigated an approach to trace a fuel optimal trajectory for Mars pinpoint landing mission with a variety of geometrical constraints.A model predictive control(MPC)approach is designed to minimize the performance index while at the same time keeping the constraints.With the proposed method,the spacecraft can achieve pinpoint landing.To validate the effectiveness of the proposed MPC approach,simulation results are included for illustration.
pinpoint landing;power descent phase;model predictive control;geometrical constraints
V448.233
A
2095-7777(2016)04-0377-7
10.15982/j.issn.2095-7777.2016.04.010
王汀,郭延宁,张瑶,等.基于模型预测控制的多约束火星精确着陆制导律研究[J].深空探测学报,2016,3(4):377-383.
Reference format:Wang T,Guo Y N,Zhang Y,et al.Model predictive control guidance for constrained Mars pinpoint landing [J].Journal of Deep Space Exploration,2016,3(4):377-383.
郭延宁 (1985- ),男,副教授,硕士生导师,主要研究方向:航天器姿态控制,行星着陆制导与控制。
[责任编辑:宋宏]
2016-07-28;
2016-08-10
国家“973计划”项目(2012CB720000);国家自然科学基金资助项目(61403103);中国博士后科学基金资助项目(2014M550195)
