小型测试转台传动和控制设计
2017-01-18陈允锋颜川江
陈允锋,颜川江,祝 新
(1.海军驻无锡地区军事代表室,无锡 214061; 2.中船重工海通电子有限公司,扬州 225000)
小型测试转台传动和控制设计
陈允锋1,颜川江2,祝 新2
(1.海军驻无锡地区军事代表室,无锡 214061; 2.中船重工海通电子有限公司,扬州 225000)
测试转台对微波天线测试具有重要意义。介绍了两轴测试转台,它具有方位和俯仰2个转动方向,程序控制和手动控制两种方式,经济性好,体积小,定位精度满足天线的内外场测试。普通转台设计要素在该转台的设计过程得到了体现。
转台;负载转矩;步进电机
0 引 言
适用的天线测试转台是测试天线的重要装置。在方位和俯仰两轴上旋转天线,可实现对天线方向图的测试。本文设计的转台体积小,结构简单,经济性好,可满足微波天线的测试要求。本文所述的转台设计过程也是一般转台设计中应考虑的因素。
1 转台要求
在微波天线研制过程中,要使天线方向图逼近理论值,需要从天线的多个角度测量天线的电磁场分布情况,包括电磁场的幅度分布、相位分布、相位中心、在不同极化下的近/远场方向图等参数,为天线的设计修改和性能优化提供数据。
一般小型天线的测试方法是固定测量系统的信号源天线位置,将待测天线安装在测试转台上,在方位和俯仰方向绕自身轴旋转,测试和分析它在各个位置接收的信号,从而得到参数特性。这样就要求测试转台的定位角度精度高,重复性好。在测试中,要排除人的因素,并实现测量的自动化,测试转台应能通过计算机远程控制。
根据天线的测试要求,转台的荷载能力大于10 kg,而转台自身小于6 kg;转动步进量应小于0.2°,转速在15°/s~30°/s范围内匀速可调;控制和调整方式可以是计算机程序控制,也可通过人工完成;在方位向可实现±360°回旋,在仰角上可实现±90°回转;方位转台和俯仰转台可联合使用,也可独立使用,并分别具有调平功能;转台应具有校准功能。
2 结构和动力
结构和动力设计是转台设计中重要的环节,包括电机选择、传动设计和座壳设计。它必须满足设计要求的限制,并约束转台驱动和控制的设计。
2.1 转台结构
由于要求俯仰部分和方位部分可独立使用,因此这两部分设计成独立的转台,它们的基座安装尺寸一致。转台旋转部分的电气连接一般需要专用旋转关节或滑环,但本转台方位和俯仰的旋转角度均不超过360°,可简单地通过柔性电缆直接连接即可。为保证转动不超限,转动部分应装有电限位和机械限位,以防柔性电缆绞坏,这一点在转台设计中一定要注重。转台的结构形式见图1。电机和传动机构均直接安装于转台内部。柔性电缆插座采用防水航空插座,便于转台在室外使用;通过插座输入内部电机的控制和驱动信号。
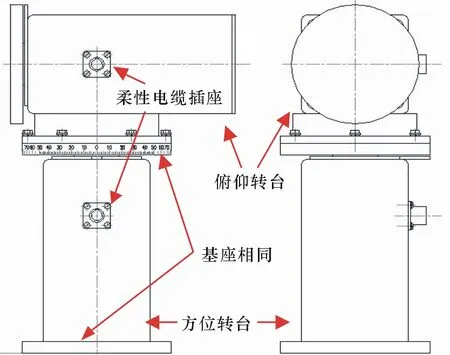
图1 转台的正视图和侧视图
作为测试转台,调平是必要的。本转台通过在2个转台的安装面各安装1个圆形水平指示水泡作为调节的辅助手段。
转台结构确定后,可以估算出方位和俯仰的力矩和转动惯量。
2.2 电机和传动
转台的控制电机可选用步进电机和伺服电机。伺服电机采用闭环控制,精度取块于角度传感器(包括旋变或编码器等),加速快,力矩可恒定,运转平稳,控制性能可靠,具有共振抑制和过载能力,但价格高,控制复杂。步进电机采用开环控制,精度取决于电机相数和拍数,加速较慢,输出力矩会随转速升高而下降,在负载大时会失步,但价格低,控制简单方便。本转台控制精度在0.2°,要求不高,运转基本以低速匀速运转为主,没有急加速状态,转台的负载为微波天线,对高转速力矩无要求。因此选用小功率步进电机进行开环控制是较好的选择。
电机和传动的选定应考虑转矩、转速、功率、效率、运行条件、防护等级等方面。本转台用于测试,功率小,主要考虑输出精度和力矩。
混合式步进电机集中了永磁式和反应式步进电机的优点,同规格下,输出力矩较永磁式大,功耗较反应式小。一般二相混合式步进电机的步距角为 0.9°/1.8°,三相的为0.75°/1.5°、五相的为0.36°/0.72°,随相位的增加,控制愈加复杂。采用二相步进电机和1:10的行星减速传动, 2细分控制时角度精度即可达到0.09°,满足转台控制精度<0.2°的要求。
对小型转台,轴承的摩擦和转动形成的风力矩可忽略不计。通过结构示意图可知,俯仰转台的负载力矩仅仅是被测天线的转矩;方位转台的负载力矩是被测天线和俯仰天线加载的所需转矩。为方便工程估算,设被测天线是一个长La、半径为Ra的圆柱,距旋转中心Da=La/2+L1,质量m1=10 kg;设俯仰转台是一个长L1+L2、宽W的长方形的实体,和方位旋转中心的偏心距e=(L2-L1)/2,质量m2=3 kg。图2是惯量估算模型,由此可算出俯仰转台和方位转台的转动惯量,给定角加速度后,计算出二者所需的转矩。也可通过实测,获得较为准确的实际转矩。
俯仰负载惯量:
(1)
方位负载惯量:
(2)
将数据代入公式后,可算得:JP≈0.03 kg·m2,JA≈0.4 kg·m2。
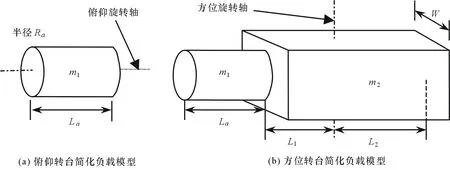
图2 转台负载模型
设俯仰和方位转台从静止到最高转速36°/s均要求在0.1 s内,则转台角加速度ε至少为6.28 rad/s2[1],可得俯仰和方位所需的转矩为:
(3)
(4)
将数据代入公式后,可算得:MP≈0.2 N·m,MA≈2.5 N·m。这是在1∶10的减速之后要达到的转矩,则相应的俯仰和方位电机的转矩至少应达到0.02 N·m和0.25 N·m。
另一要考虑的转矩是电机加减速时克服转子本身转动惯量所需的力矩MR和克服减速器惯量所需的力矩MD:
(5)
(6)
式中:JR为电机的转动惯量;N为减速比;εR为电机的角加速度;ε为平台的角加速度。
小型电机和减速器的转动惯量很小,一般为几百和几十g·cm2,在N较小时MR和MD可以忽略。
步进电机不能过负载运行,瞬间过载都可能造成失步,为安全起见,选择的步进电机转矩的保持转矩是计算值的2倍以上。选定的步进电机为56BYG250B,工作电压48 V,驱动电流2.4 A,转矩在工作频率内>0.5 N·m,满足计算要求。
减速器选用1∶10的行星减速器,和电机转轴同心安装,结构简单。需要注意的是减速器的回差应小于0.2°,承受转矩要大于转台转矩。选定的减速器额定输出转矩40 N·m,回差5′,满载输出效率96%。
3 控制和驱动
为防止人员对天线测试的影响,转台操作人员应远离测试转台。因此,要求转台控制应远离测试转台。将转台的电机控制器和显示控制单元集中在一个控制盒中,通过长电缆连接转台是适当的设计。
3.1 电路设计
转台电路包括主控电路、电机驱动电路、4位LED显示、电源电路。主控电路含串行RS422接口。各部分相互关系参见图3。
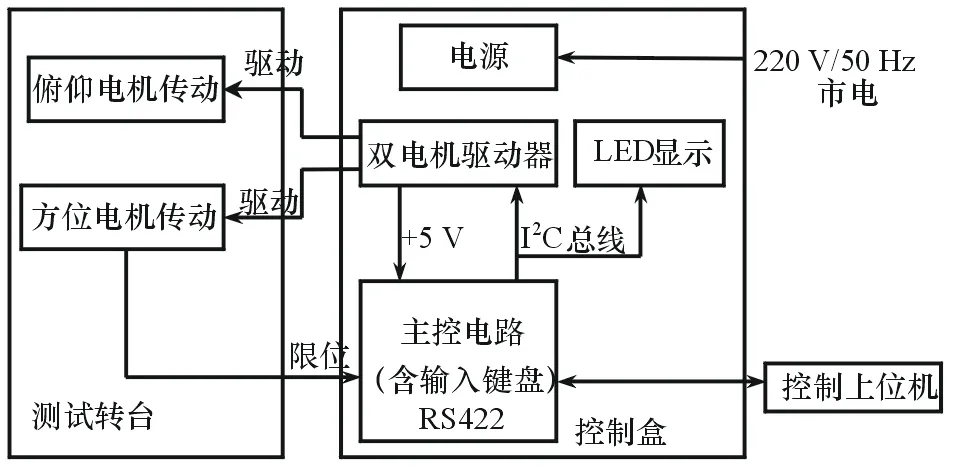
图3 转台组成功能框图
各电路模块是相对独立的功能块,采用独立的单片机完成各自的功能,主控单片机通过I2C总线对电机驱动器和显示单片机发送控制指令。其中主控和电机驱动电路是满足使用要求的重点,也是设计的重点。
3.1.1 主控单元和显示
主控单元是转台的控制中心,接收控制要求,显示转台参数,下发控制指令。根据使用要求,人工控制输入采用键盘矩阵,计算机程序控制采用422串口接收。
主控单元和显示、电机驱动均布置在1个控制箱内,通过1个I2C总线通信是简洁合适的设计。由于主控单元起主导,应将它作为master节点。
键盘矩阵本着简单明了的原则设计,不看说明也能了解用途。图4是本转台键盘的照片。

图4 控制盒键盘分布
转台只需要显示转速、角度等简单参数,用4位8段LED即可完成。LED的温度特性好,为主动发光器件,适合在野外使用。
3.1.2 电机驱动
一般货架步进电机驱动器功能全,体积大,工作温度范围窄,不适于外场工作。要满足专用转台的要求,需要设计合用的驱动器。东芝公司的THB6064H 是专用步进电机双全桥 MOSFET驱动芯片,耐压达 50 V,驱动电流4.5 A,细分可选,最大1/64,内置温度保护及过流保护,具有节省功率的自动半流锁定功能,可在-30~85 ℃的范围内工作。配合控制单片机,可作为理想的电机驱动器。
THB6064H的工作脉冲由单片机提供。在细分设置确定时,脉冲频率决定了步进电机转速。步进电机特点决定了在启动和停止时,应该线性地加速和减速,以免电机发生失步和过冲现象。对步进电机进行加减速控制,实际上就是改变输出脉冲的时间间隔,升速时使脉冲串逐渐加密,减速时使脉冲串逐渐稀疏。
由于转台是在小于±360°有限角度方位内转动,在驱动电路中含有电限位传感器。因为外壳是铝的,采用霍尔传感器是最简单的方法。霍尔传感器安装在固定位置,还可以作为转台零点校准的参考点。
3.2 控制软件
转台的控制部分由多路单片机实现,通过I2C总线联系。其中主控单片机是I2C总线的master节点,salve节点包括1路显示节点和2路驱动器控制节点。
3.2.1 主控和显示
主控软件是控制系统的核心软件,负责接收来自键盘矩阵或上位计算机串口的指令,通过I2C发送控制指令给显示节点和驱动节点。图5是控制主体流程图。

图5 主控流程图
显示节点仅完成通过I2C传来的显示指令,并驱动4位8段数码LED。这也可以用专用LED驱动芯片完成。
3.2.2 步进电机驱动
2路驱动节点的软件基本一致,均是接收主控指令,按要求的方向、转速、角度向THB6064H输出驱动脉冲、方向信号,并具有电限位和零点校准的功能。
采用单片机定时器中断输出脉冲的方式控制电机变速,实际上是不断改变定时器装载值的大小。装载值可通过查表得到。因此重点在于确定定时器的转载值表。以本转台为例,要求在0.1 s内转台从静止到最高转速36 °/s,即步进电机从静止加速到360 °/s。对应于步进电机1.8°的整步进角,在驱动器不细分时,最高速时的脉冲频率为360/1.8=200 Hz;如果选40细分,则最高速下脉冲频率为200×40=8 000 Hz。脉冲频率fP在Ta=100 ms内由启动频率增加到8 000 Hz。t时刻应有的脉冲频率fp(t)为:
(7)
式中:ωmax为电机最大角速度;F为步进电机驱动器细分数;θ为电机整步步进角;Ta为电机转速加速到最大角速度的时间。
将式(7)离散化后,可得到单片机输出n次定时器的中断时间值:
(8)
式中:n≥1;K=(ωmax·F)/(Ta·θ)。
T1=1/f0为设定初始值,它应足够长,使步进电机可启动,本例中设为1 ms。通过式(8)可得每次定时器中断时间值。本例中K=80 000,T1=1 000 μs,T2=926 μs,T3=866.5 μs等。将递推计算出的时间值换算成单片机定时中断的定时器设定值,形成定时中断设定值表。加速时正序查表,减速时逆序查表,在中断中设定下次中断时间并输出驱动脉冲,就能实现步进电机的线性加减速,从而不失步、无过冲地控制步进电机的转动[2]。
4 结束语
转台设计是机械和电子的一体化设计。本文通过对小型天线测试转台设计过程的描述,揭示了小型转台设计的一般过程。实现的转台参见图6,它在实际工作中很好地满足了天线内外场测试的要求。

图6 方位转台、俯仰转台和转台控制盒
[1] 胡仰馨.理论力学[M].南京:南京机械制造学校,1982.
[2] 坂本正文.步进电机应用技术[M].王自强译.北京:科学出版社,2010.
Design of Transmission nad Control for A Small Turntable
CHEN Yun-feng1,YAN Chuan-jiang2,ZHU Xin2
(1.Navy Military Representative Office in Wuxi Area,Wuxi 214061,China;2.CSIC Haitong Electronics CO. Ltd.,Yangzhou 225000,China)
The test turntable is of important meaning to microwave antenna test.This paper introduces a dual-axis test turntable,which has two rotation directions:azimution and elevation;two control modes:program control and manual control.The turntable is ecnomical and has small volume & good position precision which satisfies the infield and outfield test of antenna.The design procedure shows designessential of common turntables.
turntable;load torque;stepper motor
2016-11-04
TN03
B
CN32-1413(2016)06-0116-05
10.16426/j.cnki.jcdzdk.2016.06.025
