二维修正弹的控制力矩电机可行性分析
2017-01-17鞠广旭郝永平张嘉易张进超
鞠广旭,郝永平,张嘉易,张进超
(沈阳理工大学 兵器科学技术研究中心,辽宁 沈阳 110159)
二维修正弹的控制力矩电机可行性分析
鞠广旭,郝永平,张嘉易,张进超
(沈阳理工大学 兵器科学技术研究中心,辽宁 沈阳 110159)
阐述了二维修正弹的力矩电机控制的两种方案,分析了PWM控制方案的优点.提出了十字型固定翼鸭舵的修正机构设计方案,并详细说明了鸭舵控制原理和控制过程.对弹道修正弹飞行各时段所受的力矩进行分析.对舵机修正力矩的计算与分析说明,该控制力矩电机方案是可行的.
弹道修正; 力矩电机; 风阻力矩
1 修正弹力矩电机控制方案
根据二维修正弹的修正原理,弹道修正主要通过改变空气动力来调整弹丸的俯仰角及偏航角度,进一步改变弹丸飞行方向.在控制方案上,弹道修正主要是控制力矩电机的力矩输出与风阻力矩来调整舵片的位置.电机力矩的控制是通过改变电机的电压或电流,从而改变电机的力矩输出来实现的.电机力矩一般有两种控制方案:一种是通过改变电阻的大小来改变电机上电流或电压的大小,从而改变电机力矩输出的电阻控制方案;另一种是应用PWM斩波原理,通过调整斩波的占空比调整电机两端电压的大小,从而改变电机力矩输出的斩波控制方案.斩波控制方案比电阻控制方案复杂.
电阻控制方案借助串联电阻改变加在电机上的电压,通过继电器控制电阻的接通和断开,电机回路的电流被改变,从而改变电机力矩的输出.该控制方案只能根据电阻大小对电阻进行串并联来改变串联在电机回路中的电阻,而电阻的个数和阻值都是有限的,所以它不能连续调整电阻的大小来调节电流.因此,电阻控制方案对于弹道修正系统来说是不够合理的.
在斩波控制方案中,斩波的占空比可以通过两种方法来调整:一种是PWM模式,即保持脉冲频率不变,通过改变脉冲宽度调节输出电压的平均值;另一种是PFM模式,即在脉冲宽度不变的情况下,通过改变脉冲频率来改变其输出电压.PWM模式的优点在于:开关损耗可以预先确定,而且,由于输出的谐波分量一定,因此容易实现输入滤波器的优化设计.但是一旦改变了开关频率,上述优点便不再存在[1].因此,电子斩波器一般采取定频调宽的PWM调节,其滤波器容易设计.本文即选用PWM模式.
对于电机而言,电枢电压不能超过额定电压,只能使电压往下降而不能升高.斩波调速实际是通过开关的断开与闭合来调整电机电压,从而改变电机力矩输出的.本文通过控制场效应管的通断改变加载到电机电枢上的平均电压,从而达到改变电机转速及力矩大小的目的.
斩波的占空比为:
(1)
电枢两端电压:
(2)
式中:Ton为PWM波形高电平时间,s;Ts为周期,s;Ud为电源电压,V.
由式(2)可计算出电机的平均电压.这种电机调速方式平滑性好,调节范围广,稳定性好,可实现无级调速.通过斩波方式调节电压占空比,可以把电机的输出力矩进一步细分,从而满足弹道修正机构的力矩要求.
需要调整舵片时,通过改变PWM占空比,电机输出一个相应力矩,与风阻力矩和各种阻力共同使舵机停止在某一角度,从而达到弹道修正的目的.
2 鸭舵转动力矩分析
在弹丸出膛后的飞行过程中,二维修正弹的舵机除受到升力和阻力作用外,还受到一个由风阻产生的风阻力矩,也称作导转力矩Md.在弹道修正时,轴承摩擦力矩Mf与电机输出的电磁转矩Me共同作为修正力矩.修正机构因存在旋转角速度,会受到极阻尼力矩Mxz的作用.其方向同修正机构角速度的方向相反,大小与转速成正比[2].在修正平衡时,修正机构转速比较低,极阻尼力矩很小,故可忽略.鸭舵所受力矩如图1所示.导转力矩、轴承摩擦力矩、电磁力矩、滚转阻尼力矩共同作用,使修正舵机稳定在相应的位置.

图1 鸭舵所受力矩示意
整体的二维修正机构是一个惯性系统.构件一旦被制作完成,其本身的转动惯量是不变的.根据旋转系统的动能定理,有:
(3)
(4)
整理可得目标停止角度θ的表达式,即:
(5)
式中:M为力矩;J为修正系统转动惯量;ω1,ω2分别为舵片停止前和停止后的角速度;M1为轴承摩擦力矩和惯性力矩之和;M2为风阻力矩.其中,J和M2是在试验样机上多次试验测量并计算得出的有效数据.
当控制系统发出角度控制信号时,弹载计算机解算出目标停止角度θ,标定舵机下一次旋转到预调整位置时,提前θ角度开始执行修正,使力矩电机发挥作用,达到停止舵机旋转的目的.
3 固定式鸭舵风阻力矩的分析与仿真
修正机构的控制关键是调节电磁转矩Me,计算电磁转矩的前提是计算导转力矩Md,因此需要首先分析风阻力矩.固定十字型鸭舵设有一对差动舵片和一对同向舵片.差动舵片相对于弹轴斜置ε角.当平行于弹轴的气流以ε角流向翼面时,在翼面上产生侧向升力,对弹轴形成风阻力矩.不同的舵偏角有不同的风阻力矩.图2所示为某飞行速度下风阻力矩与舵偏角的关系.从图2可以看出,在飞行速度相同的条件下,舵偏角越大其产生的风阻力矩越大.在选择舵机的舵偏角时还需要考虑的另一个因素是修正能力.在修正舵机上,同向舵会产生滚转力矩,不同的舵偏角会产生不同的滚转力矩,而弹丸的弹道修正主要依靠滚转力矩,因此不同的舵偏角具有不同的修正能力[3].图3所示为不同舵偏角下横偏与位移的关系.本文根据实际需要最终选择的舵偏角为4°.
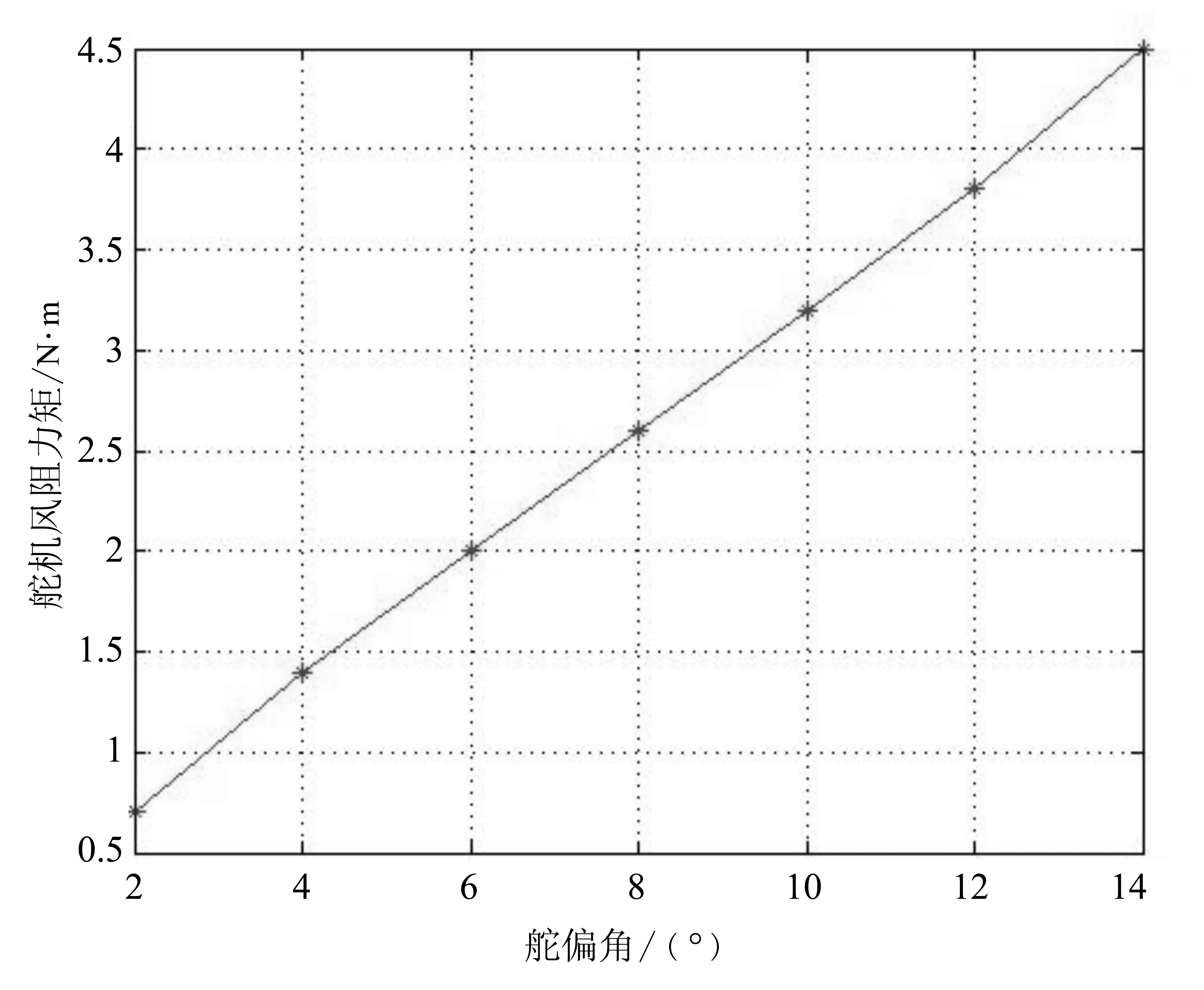
图2 某飞行速度下风阻力矩与舵偏角的关系
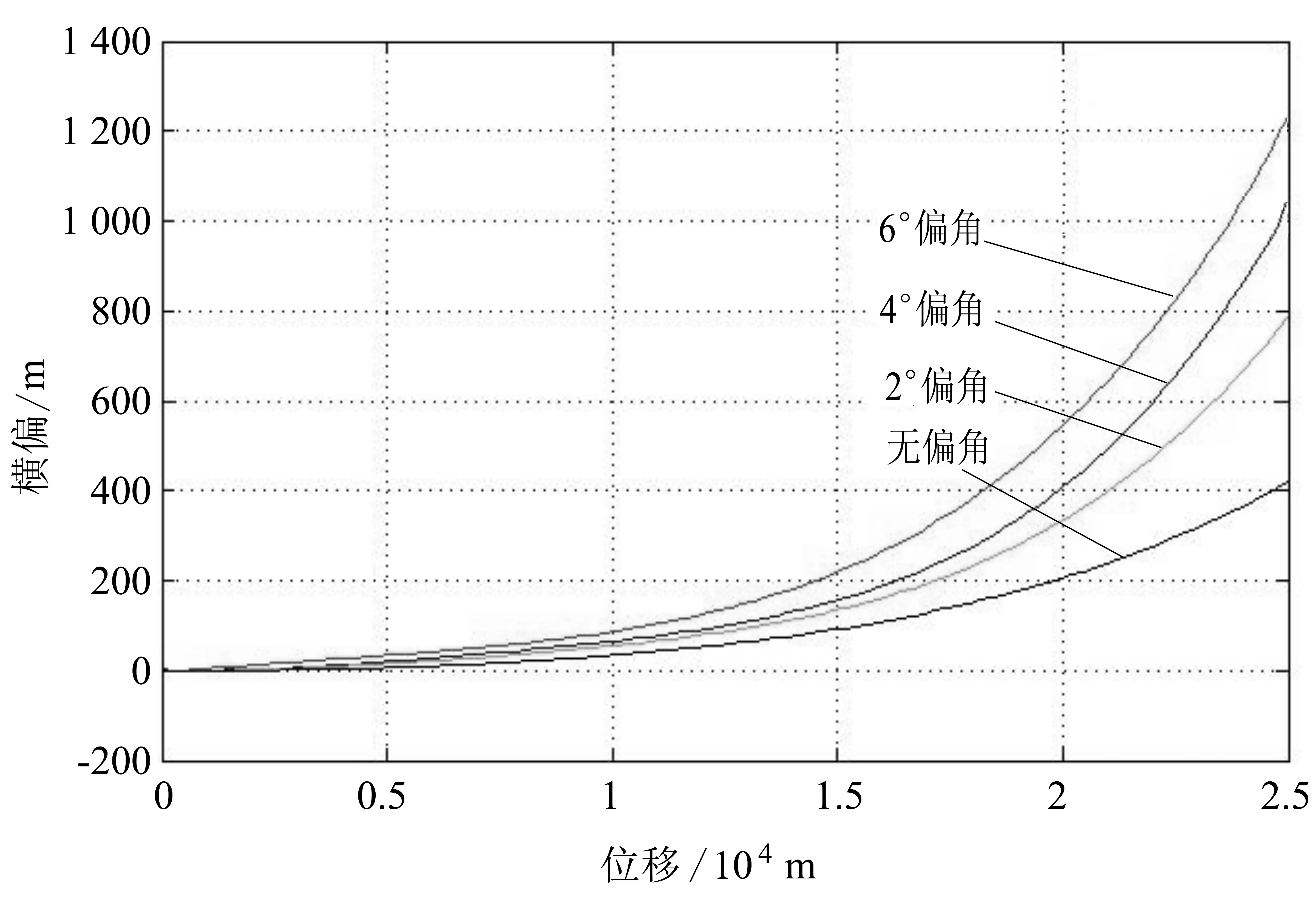
图3 舵偏角与修正能力的关系
为了用电机控制舵机,需要知道舵偏角为4°的舵机在飞行过程中所受到的风阻力矩.只有知道风阻力矩,才能确定力矩电机能否满足控制要求.图4所示为风阻力矩随弹体飞行时间的变化曲线.从图4可以看出,弹体在发射时风阻力矩最大,其值可以达到1.5 N·m,但是,在弹体发射5 s后风阻力矩降到了0.5 N·m,弹体发射10 s之后趋于平稳.弹体的控制主要就是在这个风阻力矩趋于平稳的时间内进行的.

图4 风阻力矩随弹体飞行时间的变化曲线
图5所示为某初速度下仿真得出的风阻力矩随弹体飞行距离的变化曲线.从图5可以看出,弹体在飞行的前1 500 m中,风阻力矩在0.5—1.5 N·m;飞行1 500 m之后,风阻力矩趋于平稳.其实,弹道的修正主要是在弹道的后半部分进行的.

图5 风阻力矩随弹体飞行距离的变化曲线
4 力矩电机的试验及分析
力矩电机是弹道修正中舵机控制的主要装置.其主要作用是输出力矩使舵片停止在某一目标角度,从而完成弹道修正.力矩电机输出力矩的大小直接决定该电机能否应用于修正机构.将仿真数据与电机实验得出的最大输出力矩对比即可以确定该电机能否满足修正要求[4].
图6所示为力矩电机定子的实物照片.力矩电机主要由硅钢片叠加在定子铁芯上组装而成,其绕线为普通漆包线.这里选定的绕线砸数为20砸.力矩的输出主要依靠它与磁钢的相对转动而产生感应电动势.通过控制电机导线内电流的大小可控制电机力矩的输出[5].
图6 力矩电机定子
在本文采用的PWM斩波控制方案中,测量电机转矩时不但要改变电机转速,还要改变斩波的占空比.通过改变电机的转速和斩波占空比来测量电机的输出力矩,对电机的控制才有可用性.表1所示为不同转速与占空比时电机的输出力矩.

表1 不同转速与占空比时电机的输出力矩 N·m
从表1可以看出,电机转速在140 r/s时电机力矩输出最大,可达到0.57 N·m.将其与舵机导转力矩对比可知,当弹体飞行时间大于5 s或者飞行距离超过1 500 m时,电机在高转速下输出的力矩最大值大于导转力矩,最小值小于导转力矩.因此,在修正弹控制中应用该电机进行修正是可行的.
5 控制过程及实现
弹体被打出以后是高速旋转的,出炮口位置的转速达120 r/s以上.弹体在飞行过程中会受到风的阻力.由于舵片由一对差动舵和一对同向舵构成,在风阻作用下,差动舵的导转力矩使舵片产生向反方向转动的力矩.为了对舵片进行控制,首先需要减旋,使舵片在电机力矩作用下最终转速不高于10 r/s.当弹道需要修正时,给定电机信号,使舵片停止在某个角度,同向舵即可发挥修正作用,最终使弹体始终围绕预定的飞行弹道飞行,从而命中目标[6-7].整个弹道修正过程实质上是一个检测舵机位置,控制电机力矩输出的过程.
6 结束语
本文介绍了弹道修正的控制方案,根据二维修正弹的修正原理,提出了弹道修正的基本控制模型.重点分析了鸭舵式修正机构在弹体飞行过程中所受到的各种力矩,给出了风阻力矩随飞行时间及飞行距离的变化曲线.通过力矩电机实验得出了其输出力矩值,结合控制原理及仿真数据分析了该力矩电机的可行性.
[1] 刘 伟.PWM技术在电机驱动控制中的应用[D].安徽:合肥工业大学,2009.
[2] 张进超.弹道修正机构的控制原理及系统设计[D].辽宁:沈阳理工大学,2015.
[3] 谢天祥,张嘉易,李曙光,等.关于小口径尾翼弹修正方法的研究[J].成组技术与生产现代化,2015,32(2):48-52.
[4] 张福新,王 海,张嘉易,等.弹道修正机构永磁电机的仿真设计及应用测试[J].成组技术与生产现代化,2015,32(4):1-4,17.
[5] 王秀和.永磁电机[M].北京:中国电力出版社,2007:187-193.
[6] 史金光,王中原,常思江,等.基于减旋控制的侧向弹道修正技术[J]. 弹道学报,2010,22(3):81-85.
[7] 张 通,赵晓利.弹道修正弹及其关键技术分析[J].飞航导弹,2014(5):38-42.
Feasibility Analysis of Torque Motor Controlled by Two-dimensional Correction Projectile
JU Guang-xu,HAO Yong-ping, ZHANG Jia-yi,ZHANG Jin-chao
(Weapon Science & Technology Research Center, Shenyang Ligong University,Shenyang 110159,China)
This paper introduces the basic concept of trajectory correction, analyzes the advantages of PWM control scheme, and puts forward & adopts cross fixed wing duck rudder correction mechanism design. Besides, it also explains the duck rudder control principle and control process with detail, calculates trajectory correction in each period of torque and obtains the resultant force and electromagnetic torque calculation formula, and finally determines the feasibility of a motor through the calculation and analysis of the torque of the steering gear.
trajectory correction; torque motor; wind resistance moment
2016-07-12
国家863计划资助项目(2009AA04Z167)
鞠广旭(1989-),男,山东济南人,硕士研究生,研究方向为智能弹药.
1006-3269(2016)04-0037-04
TJ12.1
A
10.3969/j.issn.1006-3269.2016.04.009
