迭代学习模型预测控制算法在锅炉过热汽温中的应用
2017-01-17杜文艳雷鹏娟
毕 磊,杜文艳,雷鹏娟
(1.承德石油高等专科学校 电气与电子工程系,河北 承德 067000;2.中核控制系统工程有限公司,北京 100176)
迭代学习模型预测控制算法在锅炉过热汽温中的应用
毕 磊1,杜文艳2,雷鹏娟1
(1.承德石油高等专科学校 电气与电子工程系,河北 承德 067000;2.中核控制系统工程有限公司,北京 100176)
为提高锅炉经济有效且安全运行,采用一种模型预测控制融入到迭代学习控制的算法,不仅能够迅速准确地完成对期望轨迹的完全跟踪任务,而且具有实时抗外界干扰的能力,加快过热汽温稳定,控制跟踪速度,提高锅炉运行效率。
过热汽温;模型预测控制;迭代学习控制
在电厂实际运行当中,想要提高经济效益并且要保证机组的安全运行,必须实现过热汽温稳定控制,过热汽温是随时间在不断变化,其中任何一个小的扰动都有可能引起过热汽温变化,传统PID控制器的参数不随外界的扰动而变化,仅用“不变”的PID控制器去控制“时变”的过热汽温,效果不理想。起源于实际过程控制领域的模型预测控制[1]不仅控制性能好,且具有很好的鲁棒性,本算法除了能有效地克服操作过程中的不确定性、耦合性及多变量问题,还能显式的解决过程控制变量中的约束问题。但是仅单纯应用模型预测控制,则很难实现被控对象的输出完全无误差跟踪设定目标的输出轨迹,然而迭代学习控制[2]则很容易处理这类轨迹跟踪问题[3-6],因为迭代学习控制有很强的学习能力。结合这两种控制算法的优缺点,笔者将模型预测控制融合到迭代学习控制算法[7,8]中,并将此算法应用到锅炉过热汽温系统,并与PID算法效果相比较,验证了迭代学习模型预测控制算法在锅炉过热汽温控制方面的优越性。
1 迭代学习模型预测控制算法描述
1.1 问题描述
首先来定义一多输入多输出(MIMO)的重复离散控制系统,控制过程的操作域为固定长度[0,N],N为采样数。在第N个采样点上,输出序列和输入序列分别为y和u。d则是干扰序列。输入、输出及干扰的数据序列如下表示:
u=[uΤ(0),uΤ(1),uΤ(2)…uΤ(N-1)]Τ
(1)
y=[yΤ(1),yΤ(2),yΤ(3)…yΤ(N)]Τ
(2)
d=[dΤ(1),dΤ(2),dΤ(3)…dΤ(N)]Τ
(3)
其中,过程控制系统的输出维数和输入维数分别为ny和nu。到第t个采样点上,输出采样个数和输入采样个数分别为nut和nyt。t∈[0,N],u∈Rnu·N,y∈Rny·N。d是不可测量的干扰,d中有一部分是重复的,重复部分是在每一次的迭代过程中都会出现的那一部分,其余的部分则是在重复过程中随机出现的。一般非线性重复过程可以描述为如下的输入输出关系:
y=g(u,d)
(4)
控制目标是想通过调整输入值,使离散控制系统的输出轨迹完全跟踪期望输出轨迹。假定yd为期望轨迹,ud为期望控制量,现在给出跟踪误差e的表达式
e=yd-y=g(ud,0)-g(u,d)
(5)

(6)
(7)
那么第k次重复过程误差模型表示为
(8)
令
(9)
则
(10)
(11)

(12)
通过式(8)和(12)得下式
(13)

(14)
1.2 动态误差模型的建立
式(14)定义为过渡误差模型,从中可以看出过渡误差模型是在迭代次序的基础上推导出来的,因此这种控制算法无法在每一次的迭代过程中实现实时误差补偿,所以就需要引入误差动态模型来进行控制器的设计,动态误差模型是基于时间的,以此来实现实时误差的补偿。
首先把式(11)中的下三角矩阵A(系统的脉冲响应矩阵)进行分块,定义如下:
A=[A(0),A(1),A(2)…A(N-1)],A(j)∈R(ny,N)×nu
(15)
设
ek(t)=[ek(1),ek(2),ek(3),…ek(t)…ek(N)]Τ
(16)
ek(t)为当Δuk(t)=Δuk(t+1)=…=Δuk(N-1)=0时第k次迭代过程中的输出离散误差序列。通过脉冲响应矩阵A和ek(t)的定义和过渡误差模型(14),可以得到
(17)
其中Δuk+1=uk+1-uk,是相邻的两个重复操作过程间的差值,同理:
(18)
由上两式可得
(19)
1.3 卡尔曼估计
我们用卡尔曼滤波[9]来构造具有最优状态估计的最优预测控制器,详细推导过程如下:
(20)
(21)
Kk(t)为增益矩阵,Pk(t)为协方差矩阵,ek(t+m|t)表示的是在第k次迭代过程中从t时刻到t+m-1时刻的输入发生改变时,在t时刻对离散误差序列的预测,通过下列方程计算得出:
(22)
1.4 控制律的推导
为防止过程控制量的剧烈变化和超调,可采用下式所示的二次性能指标:
(23)

控制律可通过下式计算
(24)
仅控制量的第一个元素Δuk(t)得到实施。
2 迭代学习模型预测控制算法在锅炉过热汽温中的研究
锅炉主汽温的控制是非常严格的,文献[10]是对某600MW超临界直流锅炉的过热器在喷水扰动情况下的汽温特性进行动态机理分析,该文献详细计算了高温加热器四个典型负荷点处的出口汽温在喷水扰动下的传递函数,见表1。文献[10]采用的是传统的PID控制,控制参数见表2。

表1 出口汽温在喷水扰动下的传递函数
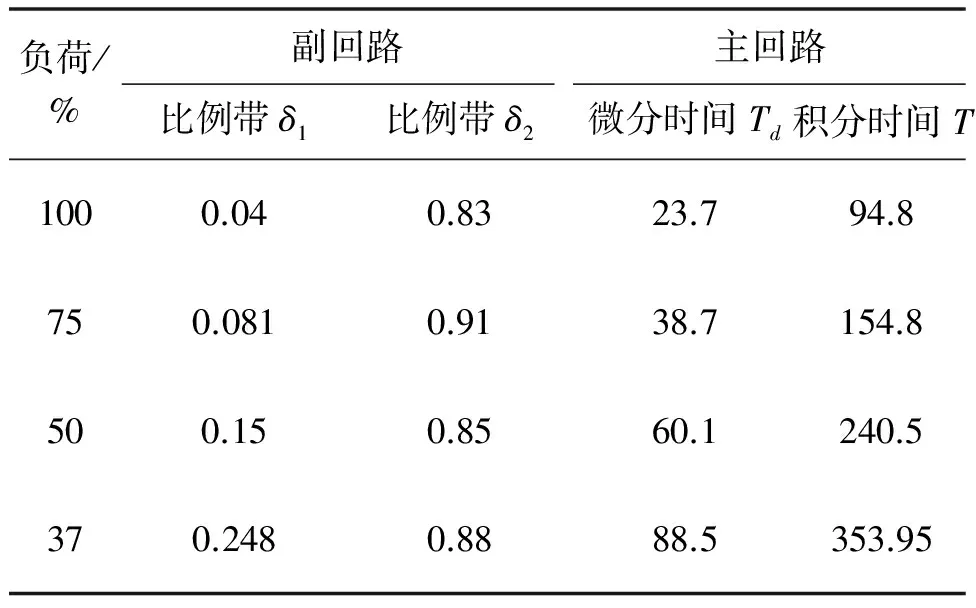
表2 PID控制参数
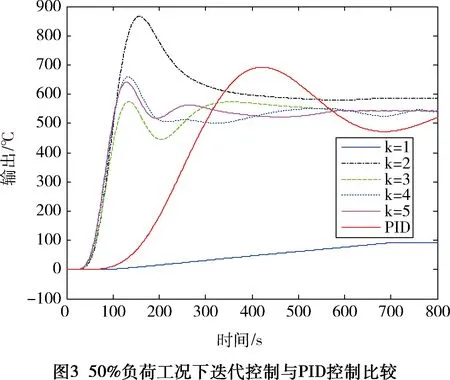
我们采用同样的被控对象,在四个不同的负荷下,分别采用文献[10]中的PID控制方法和迭代学习模型预测控制算法,用MATLAB仿真。仿真结果如图1~图4所示。仿真图的输出是锅炉主汽温(单位为℃),横坐标是控制时间(单位为s)。
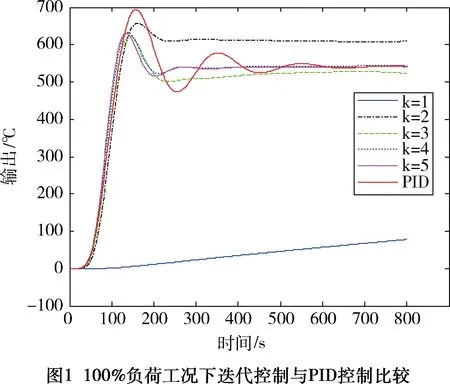

从仿真图1中可以看出,第五次迭代学习模型预测控制收敛效果明显优于PID控制,能够加快过热汽温稳定速度,提高锅炉运行效率。图2~图4分析方法同理。
3 结论
在四个典型负荷工况下,采用迭代学习模型预测控制算法的输出轨迹远优于PID控制输出轨迹,应用迭代学习模型预测控制算法能让控制目标更早收敛于期望值,验证了算法的优越性。
[1] Rawlings JB. Tutorial Overview of Model Predictive Control[J].IEEE Control System,2000,20(3):38-52.
[2] ARIMOTO S, KAWAMURA S, MIYAZAKI F. Bettering operation of robotics by learning[J].Robotic System,1984,1(2):1123-1140.
[3] 孙明轩,黄宝健.迭代学习控制[M].北京:国防工业出版社,2000.
[4] 谢胜利,田森平,谢振东.迭代学习控制的理论与应用[M].北京:科学出版社,2005.
[5] 林辉,王林.迭代学习控制理论[M].西安:西北工业大学出版社,1998.
[6] 于少娟,齐向东,吴聚华.迭代学习控制理论及应用[M].北京:机械工业出版社,2005.
[7] J.H. Lee, K. S. Lee, W. C. Kim. Model-based Iterative Learning Control with aquadratic Criterion of Time-varying Linear Systems[J].Automatic, 2000,36(5):641-657.
[8] I. S. Chin, H. J. Lee. Model Predictive Control Technique Combined with Iterative Learning Control of Batch Process[J].AICHE J,1999,45(10): 2175-2187.
[9] Kalman RE.A new Approach to Linear Filtering and Prediction Problem[J].Transaction of the ASME-Journal of Basic Engineering,1960,32(6):35-45.
[10] 范永胜,徐治皋,陈来九.基于动态特性机理分析的锅炉过热汽温自适应模型模糊控制研究[J].中国电机工程学报,1997,17(1):23-28.
Application of Iterative Learning Model Predictive Control Algorithm on Superheated Steam Temperature
BI Lei1, DU Wen-yan2, LEI Peng-juan1
(1.Department of Electrical and Electronic Engineering, Chengde Petroleum College, Chengde 067000, Hebei, China; 2.China Nuclear Control System Engineering Co., LTD, Beijing 100176, China)
To improve the cost-effective and safe operation of the boiler, an algorithm of model predictive control into iterative learning control can quickly and accurately achieve the desired trajectory tracking task with real-time anti-jamming ability. It has the ability of speed superheated steam temperature stability, controlling tracking, and improving boiler operating efficiency.
superheated steam temperature; model predictive control; iterative learning control
河北省高等学校科学技术研究青年基金项目(迭代学习模型预测控制算法研究与应用):QN20131122
2016-07-24
毕磊(1980-),男,辽宁阜新人,讲师,主要从事仪表自动化研究,邮箱17299328@qq.com。
TK22
B
1008-9446(2016)06-0057-04
