基于1pps的GPS/INS组合导航系统数据同步方法
2017-01-16丁贝
丁贝
摘 要:针对GPS/INS组合导航系统中GPS数据和INS数据不同步的问题,以卫星接收机发出的秒脉冲信号作为参考时标,本文提出了一种软、硬件相结合的数据同步方法。该方法基于GPS接收机输出的1pps,综合考虑时间起点与基准不一致、采样频率不一致、电路时延问题对数据同步的影响,设计了中断计时方法,利用数字信号保持器对惯导数据与卫星数据进行同步。仿真结果表明,该方法能保证数据准确同步。
关键词:组合导航;数据同步;中断;卫星秒脉冲
1 影响数据同步的主要因素
对于GPS/INS组合导航系统,导致从IMU和GPS接收机输出的导航数据不同步的原因从如下原因进行分析:
1) 时间起点和基准不同
卫星和惯导系统都是独立的,与不同的时间系统对应,时间基准与起点不一致。卫星接收机使用的是UTC时间,而惯导系统有自己的时钟,利用其内部电路中的计时器计时,每次惯导系统开机,都是从零开始重新计时。卫星接收机依靠秒点与UTC时间一致,保证其时间间隔的稳定性;而惯导系统是依靠内部晶振为基准,由于温度特性等因素的影响,INS时钟会发生漂移。
2) 数据更新频率不一致
卫星接收机和INS的数据更新率是不同的,惯导系统可以达到200Hz,而卫星接收机一般为1Hz。卫星接收机测量采样能够严格在秒脉冲点进行,此时,在秒脉冲整秒时刻肯定有卫星数据,但此时惯导系统未必会有新的测量值。
3) 电路时延
在电路板中,测量、数模转换、采样过程中均会产生时延,这样就会导致惯导数据和导航信息传输过程中存在时间误差。在卫星接收机和惯导系统数据传输到导航系统中的数采板时,产生传输时延。
2 数据同步方法研究
2.1 同步问题分析
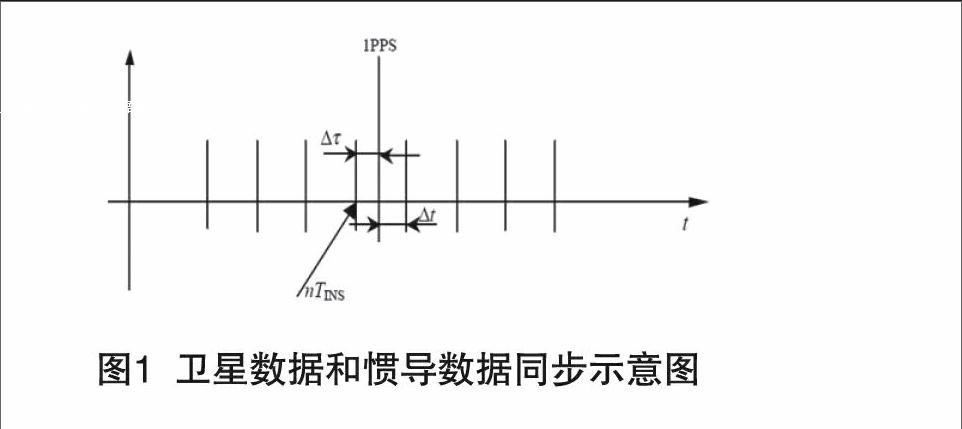
卫星数据和惯导数据的同步示意图如图1所示,卫星数据接收点由长竖线显示,即卫星秒脉冲;惯导数据接收点由短竖线显示。从下图能看出,卫星数据接收时刻没有惯导数据。现假设惯导数据域卫星数据的接收时间差为,在秒脉冲上沿,惯导与卫星数据时标差为。如果能实时计算出每个秒脉冲与秒脉冲之前的惯导数据接收时间差为,经过某种算法估计出惯导系统在每个卫星秒脉冲点上的值,这样就相当于采样到两路信号在同一时刻的数据。
2.2 同步算法设计
因为惯导数据的周期性特点,同步外推算法可以使用数字信号保持器。假设卫星秒脉冲时间点与惯导数据X(nTinx )的时间差为,则可利用以下的数据外推m阶保持器实现同步点上的数据外推估计,多项式可表示为:
(1)
式中,Tinx是惯导数据输出周期,是需要外推的时间差,且。
因为卫星数据更新时间点与惯导数据更新时间点不一致,且惯导数据更新速率要高出很多倍,所以在每个秒脉冲点上可以保证有足够数据用于构建高阶保持器,从而实现数据同步。但是综合考虑外推精度与运算时间,选用了二阶保持器,外推多项式如下所示:
(2)
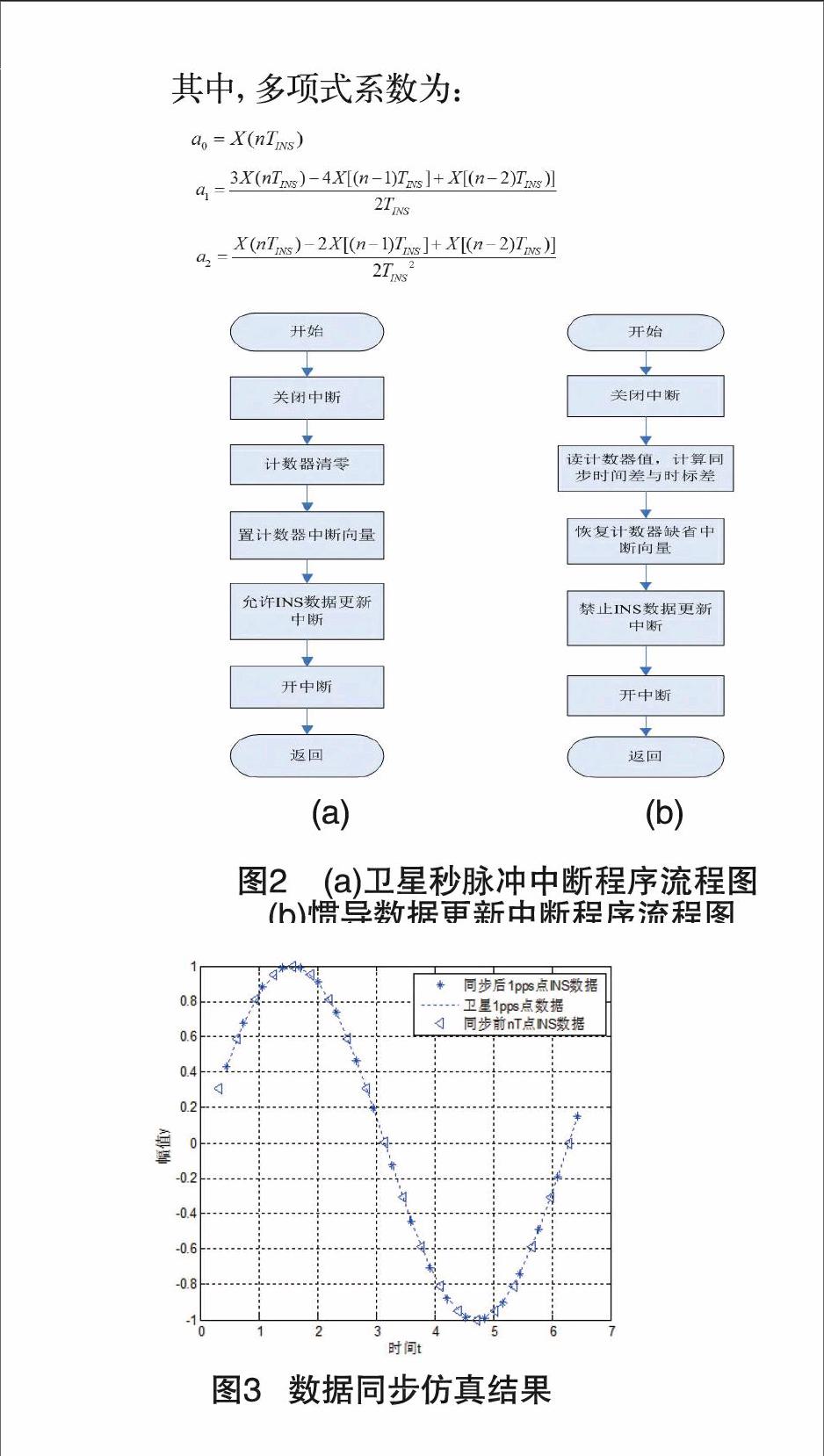
其中,多项式系数为:
由式(2)可知,确定外推多项式系数之后,仍需确定时间差才能对估计数据进行计算,此时数据同步的关键所在就是获取同步时间差。因为UTC时间与卫星秒脉冲时间秒点是对齐的,如果惯导数据频标一定,则只需要第一次的时标差,每个秒脉冲时间点处的时间差就能按照固有周期推算出来。但是,惯导数据存在频标漂移,一定的误差会存在于时标差直接递推过程中,于是为了解决这个问题,一种利用中断计时的方法获取时间差和时标差的方法在此处提出。
2.3 硬件及中断设计
在惯性导航系统中设计两个中断,分别为1pps脉冲中断与INS数据更新中断,由数据处理软件进行操作。在秒脉冲中断触发时,计时器启动,在这个过程中,惯导数据更新中断只有在秒脉冲触发中断后才会被允许;当惯导数据更新中断到来后读出计时值,计时器重置,该计时值即为时标差,于是也就得到了。二者关系如下:
(3)
1pps脉冲中断服务程序流程如图2(a)所示, INS数据更新中断服务程序流程如图2(b)所示。
因为惯导数据的更新频率高,为了节省CPU资源,以此保证组合导航系统数据处理的实时性,惯导数据更新中断只有在卫星秒脉冲中断触发后才能被启动。
3 仿真实验及分析
本论文分析了GPS/INS组合导航系统的数据同步问题,并从算法,硬件的角度设计解决了GPS和INS数据的同步问题,其中核心是外推算法设计,所以实验过程针对外推算法进行仿真分析。
仿真结果如图3所示,图中‘*表示同步后卫星秒脉冲点的惯导数据,△表示未同步的nT点惯导数据,虚线表示卫星秒脉冲点处的卫星数据。
从图可以看出,未同步的INS数据与实际INS数据有一个时间差,也就是本文提到的同步时间差 ,但是可以看到同步后‘*线数据与同步前‘△线数据连成一条正弦波线,也就是实际INS数据,由此可以证明外推算法的正确性;经过实时同步处理后,发现卫星数据与惯导数据基本重合,所以本文提出的实时同步方法是可行的。
