基于Matlab/Simulink永磁同步电动机调速系统的建模与仿真
2017-01-16曹少泳
曹少泳
(北京理工大学 珠海学院工业自动化学院,广东 珠海 519085 )
基于Matlab/Simulink永磁同步电动机调速系统的建模与仿真
曹少泳
(北京理工大学 珠海学院工业自动化学院,广东 珠海 519085 )
永磁同步电动机(PMSM)作为一种新型的交流同步电机,其在各行各业与日常生活中应用非常广泛;PMSM较小的转动惯量,较高的功率密度和运行效率等优点,使得其发展和应用空间很广泛;通过Scope模块对定子三相电流,电机转速、转子的转角、转矩以及dq轴电流进行观察,并对系统中的参数进行及时地修改;最后的结果表明,该调速系统具有启动快、调速特性好、响应速度快和稳定性好等优点,为电动机在实际的调速系统设计中提供了可靠的理论依据。
永磁同步电动机;坐标变换;矢量控制;仿真建模
0 引言
PMSM在现代交流调速系统的控制下,使其功率因数变高,可以检测转子参数和效率更高的特点,近几年来,国内外的研究人员越来越重视研究永磁同步电动机的调速系统[1]。
PMSM是一个多变量、非线性、高耦合的系统。其输出转矩与定子电流之间有着复杂的函数关系,想要得到良好的控制性能,就必须对磁场进行解耦;再加上PMSM没有转差频率电流,转子的参数对其影响不大,因此PMSM非常适合实现矢量控制[2]。
利用Matlab/Simulink软件,建立一个PMSM的调速系统,通过仿真和调试对此调速系统进行分析以达到更深一层的研究。
1 调速系统的模型建立
首先是确定PMSM整个调速系统的整体框图,根据永磁同步电动机的结构和数学模型以及永磁同步电动机的矢量控制和空间矢量脉宽调制的研究(由于篇幅限制,此文不再阐述,可以参考文献[3-10]),在Simulink中建立各个模块,再把各模块连在一起构成调速系统的整体模型。图1为永磁同步电动机调速系统的整体模型框图。
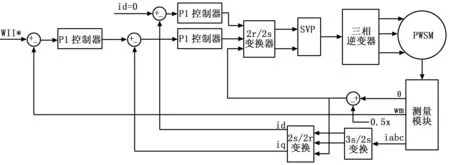
图1 永磁同步电动机调速系统框图

将三相永磁同步电动机的ABC坐标系变换到αβ0坐标系,再变换到dq0坐标系,这样使得d轴与转子永磁体的N极同方向,因此可以像直流电动机那样,直接调节iq来控制转矩,从而达到永磁同步电动机解耦的目的。坐标变换模块如图2-4所示,SVPWM模块如图5所示。

图2 dq/αβ坐标变换
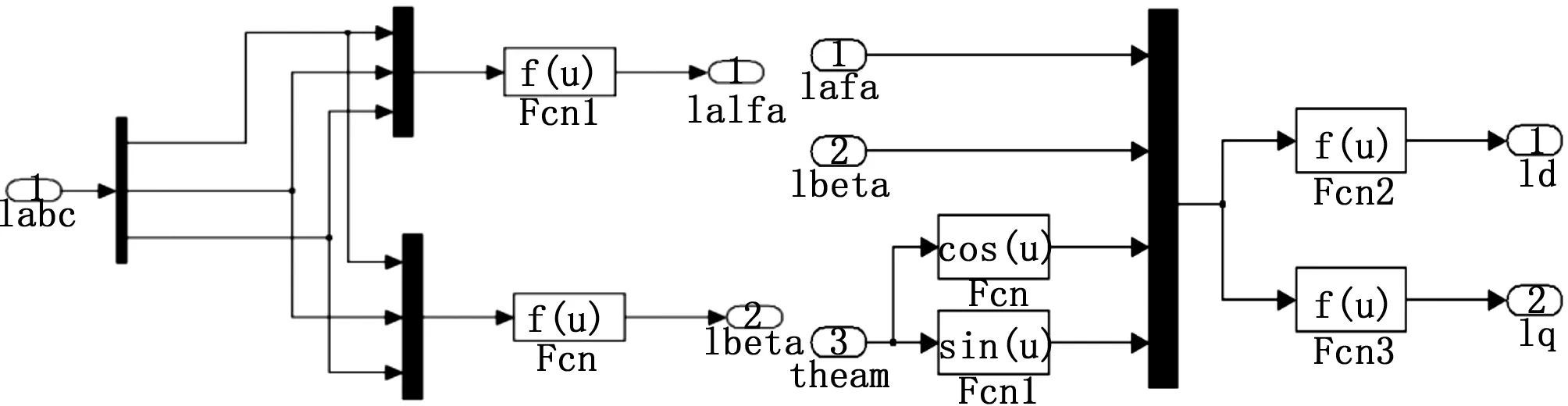
图3 abc/αβ坐标变换 图坐标变换
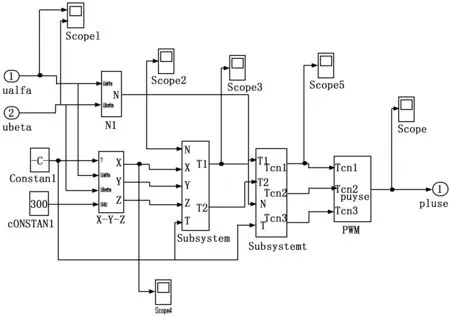
图5 SVPWM模块图
2 参数设置及结果分析
2.1 模块设置
2.1.1 dq/αβ坐标变换
dq/αβ坐标变换中Fcn1和Fcn的设置如图6、图7所示。


图6 dq/αβ坐标变换Fcn1设置 图7 dq/αβ坐标变换Fcn设置
2.1.2 abc/αβ坐标变换
abc/αβ坐标变换中Fcn1和Fcn的设置如图8、图9所示。

图8 abc/αβ坐标变换Fcn1设置 图9 abc/αβ坐标变换Fcn设置
坐标变换



2.1.4 PMSM参数
永磁同步电动机(PMSM)的参数设置如图12所示。

图12 PMSM参数设置
其中:R(Ω)是定子电阻,Ld(H)d相绕组自感,Lq(H)为q相绕组自感,Wb为转子磁通,J(kg·m^2)为转动惯量,F(N·m·s)为摩擦系数,P为极对数。
2.2 仿真结果及分析
该系统逆变器的供电电压设定为300 V,仿真总时间为t=0.5 s,在t=0.1 s时加入5 N·m的负载。刚开始T=0 s时输入转速信号为300 r/min,在t=0.3 s时转速变为800 r/min。
由图13可以看出,定子三相电流的波形在开始时有波动,随后波形基本是呈正弦波,有微小的波动。在0.1秒时突然加入负载后,波形发生畸变,有一个跃升,但很快就稳定下来,0.3秒时给定转速升高,波形发生畸变,随后又再次稳定,稳定后的波形继续呈正弦波。比较一下给定转速为300 r/min和800 r/min,不难看出其电流的最大值在两个给定转速下是不变的,而频率有明显的不同,给定转速为300 r/min时的频率较800 r/min时的频率低。综上,仿真符合PMSM调速运转时三相电流的波形。

图13 定子三相电流 图14 转矩图
图14为PMSM的输出转矩图。由图可以看出,在0.1秒时突然加入5 N·m负载时,转矩有明显的上升,然后很快就稳定下来,基本保持在5 N·m处,而当给定转速由300 r/min变为800 r/min时,转矩突然上升,然后经过短暂的振荡后,继续稳定在5 N·m处。由图还可以看出在加入负载和进行调速的时候,其发生振荡的时间较短,因此控制效果比较好。
一开始给定的转速是300 r/min,在0.1秒时,转速有明显的下降,然后很快地又回到300 r/min上。这是因为在0.1秒时有负载的加入,因此转速会突然下降,通过PI控制器的快速调节,转速很快又回到给定的转速300 r/min上。而在改变给定速度时,转速有明显的跃升,经过几次振荡后稳定在所给定的转速800 r/min上,如图15所示。由此看出,该系统在调速时反应速度快,振荡次数少,因此其调速性能良好。
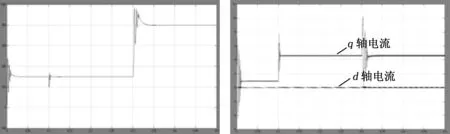
图15 转速波形 图16 dq轴电流
图16中,q轴电流和d轴电流都是直流电流,而在0.1秒加入负载时,q轴电流有明显的升高,随后又很快的稳定下来,在改变给定转速时q轴电流经过几次短时间的振荡后,回到了改变前的电流值,而d轴电流在加入负载和进行调速时均有微小的波动,但基本上电流都保持为零。由此可得,该系统中使用的id=0控制策略很成功。
3 总结
基于Matlab的电动机控制系统仿真技术,目前已经在开发、设计、应用与教学等多个领域中广泛应用,其优点是能够在计算机上可模拟电动机的调速系统,及时并准确地发现研究过程中所出现问题,使得研究人员能够快速制定解决方案,为实际应用中提供了非常可靠的理论依据。利用Matlab/simulink对永磁同步电动机的调速系统进行建模与仿真在理论依据上和实际应用当中具有一定的意义。对调速系统模型进行仿真,通过修改模型中的参数,对不同的仿真结果进行比较分析,可知该永磁同步电动机调速系统能够平稳运行。
[1] 李 骥,宋仲康. 基于DSP的永磁同步电机矢量控制系统的研究[D]. 武汉:武汉理工大学,2008.
[2] 李永东. 交流电机数字控制系统[M]. 北京:机械工业出版社,2002.
[3] 李三东,薛 花,纪志成. 基于Matlab永磁同步电机控制系统的仿真建模[J]. 江南大学学报:自然科学版, 2004, 3(2):115-120.
[4] 高仕红. 基于MATLAB永磁同步电机矢量控制的仿真研究[J]. 湖北民族学院学报:自然科学版, 2006, 24(4):50-52.
[5] 李发海,朱东起. 电机学(第4版)[M]. 科学出版社,2010.
[6] 邓干铭. 永磁同步电机控制系统仿真[J]. 龙岩学院学报, 2010, 28(5):28-31.
[7] 黄 雷,赵光宇,年 珩. 基于扩展反电势估算的内插式永磁同步电动机无传感器控制[J].中国电机工程学报, 2007, 27(09):59-63.
[8] 周雒维,杨 柳,彭国秀,等. 一种永磁同步电机滑模观测器的设计[J]. 重庆大学学报, 2008, 31(01):34-37.
[9] 沈艳霞,纪志成. 基于无源性永磁同步电机模糊滑模控制系统研究[J]. 系统仿真学报, 2007, 19(17):4012-4016.
[10] 钱 昊,赵荣祥. 永磁同步电机矢量控制系统[J]. 农机化研究, 2006(2):90-91.
Permanent Magnet Synchronous Motor Speed Control System Modeling and Simulation Based on Matlab/Sumlink
Cao Shaoyong
(School of Industrial Automation,Zhuhai College of Beijing Institute of Technology,Zhuhai 519085,China)
Permanent magnet synchronous motor(PMSM) is a kind of new type AC motor with high power density,small moment of inertia, more efficiency,and so on.Its application and development space is very broad,and it’s widely used in all walks of life and daily life nowadays. Used Scope to observe the stator current,speed,rotor angle,torque and dq axle current when in the simulation.So that we could perfect the parameter timely.Finally,the results showed that the speed control system has some advantages such as start-up fast,speed regulation characteristics is good,quick response time,stability,and so on.For that,it can provide a reliable theoretical basis for the actual speed control system design.
permanent magnet synchronous motor;coordinate transformation;vector control;modeling and simulation
2016-06-25;
2016-07-23。
曹少泳(1982-),男,江西九江人,硕士研究生,主要从事电机与控制、 机器人方向的研究。
1671-4598(2016)12-0177-03DOI:10.16526/j.cnki.11-4762/tp
TM
A
