基于MEMS传感器的风洞尾旋姿态测量研究
2017-01-16杨洪森
宋 晋,蒋 敏,李 睿,杨洪森,颜 来
(中国空气动力研究与发展中心低速空气动力研究所,四川 绵阳 622672)
基于MEMS传感器的风洞尾旋姿态测量研究
宋 晋,蒋 敏,李 睿,杨洪森,颜 来
(中国空气动力研究与发展中心低速空气动力研究所,四川 绵阳 622672)
尾旋是飞机在失去控制后的一种极危险的飞行状态,陷入尾旋极易造成飞机的坠毁,在飞机研制过程中为了提高其机动性及抗尾旋能力,必须对这种极限飞行状态进行研究;在立式风洞中开展尾旋试验是目前效率最高,安全性最有保障的技术手段;试验测试的主要参数是飞机在尾旋及改出过程中的姿态角(包括俯仰角、偏航角和滚转角);在此简要介绍了通过陀螺仪、加速度计和地磁计进行姿态数据融合的算法,以及采用了一种MEMS传感器进行尾旋姿态测量的试验技术,并且其姿态数据可由Zigbee无线数据模块实时传送到测量计算机;通过试验验证,该技术简单有效,不受现场环境限制,系统动态性能稳定可靠,角度测试精度优于1°,满足了试验需求,提高了试验效率及数据质量。
尾旋试验;姿态角;MEMS传感器
0 引言
MEMS(micro electro mechanical systems,微机电系统)技术是近十几年来在微电子技术基础上结合精密仪器技术发展起来的一个新的科学技术领域,是集多个微传感器、信号处理、通信接口以及电源于一体的微型电子机械系统[1]。既可应用于车辆自主驾驶,人体关节姿态测量等民用领域,又可应用于小型飞行器、低成本制导弹药和雷达系统等军用领域,具有非常广阔的应用前景。
尾旋是飞机在失速状态下,机身围绕某一轴旋转的同时,飞机自身也在旋转的复合运动[2]。由于尾旋的不可控性,极易造成飞机的坠毁,为了研究尾旋现象及改出方法,最直接有效的方法是在风洞中通过飞机模型开展尾旋试验,试验测试的主要参数是飞机尾旋及改出过程中的姿态角[3]。在此介绍了一种通过MEMS传感器开展尾旋试验的技术。
1 MEMS传感器测量原理
测量姿态角采用的MEMS传感器包括加速度计、陀螺仪和磁强计。加速度计和陀螺仪属于惯性敏感器件,分别测量载体的加速度值和旋转角速度,磁强计是用来敏感空间环境磁场强度和方向。由于加速度计和磁强计具有稳定性差但没有积累误差的特点,而陀螺仪具有稳定性好但有积累误差的特点,因此需要通过Kalman 滤波对3种传感器的数据进行融合,以此来提高测量精度,如图1所示。
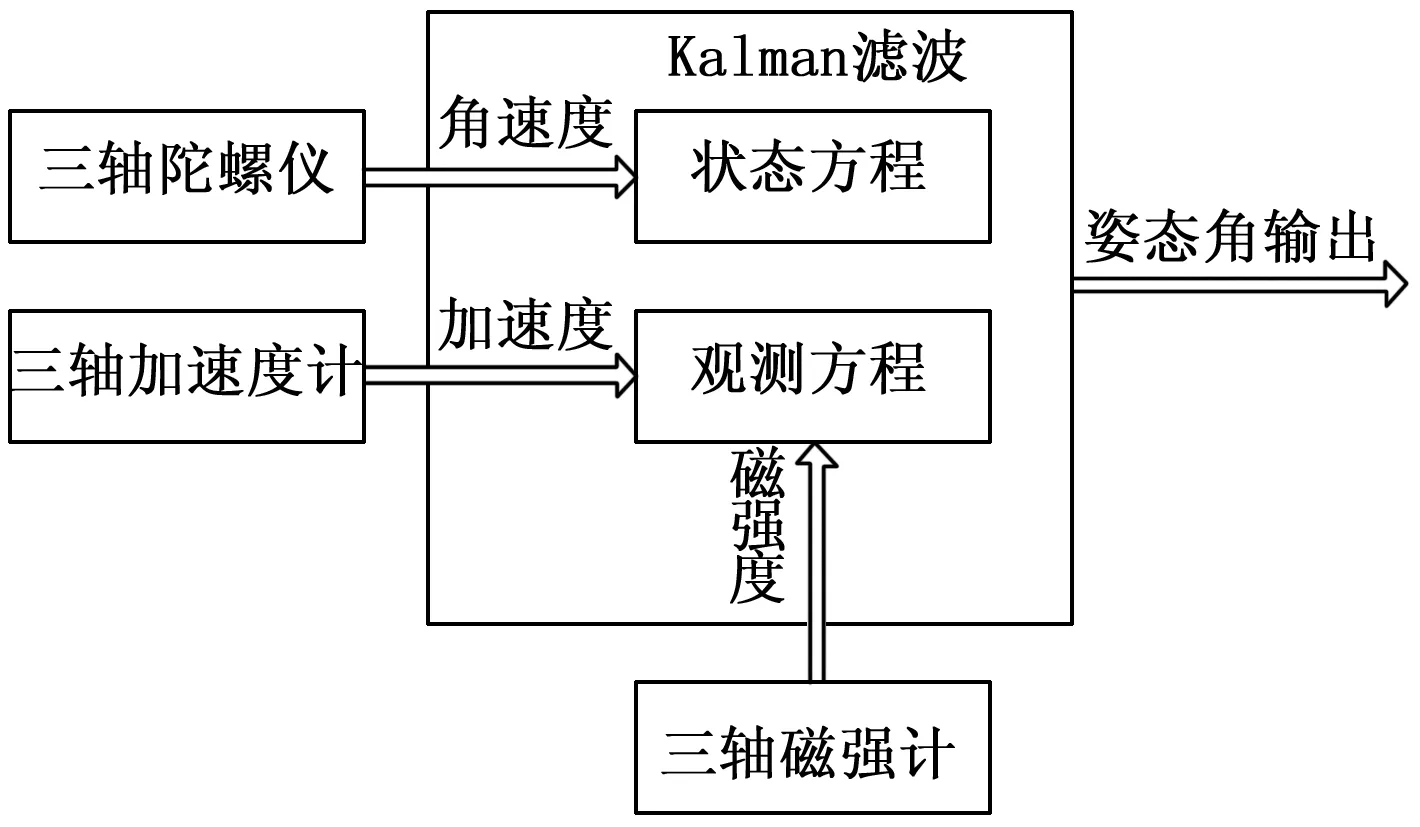
图1 姿态角计算流程
试验测量中涉及到两个坐标系,分别是机体坐标系(简称体轴系)和风洞坐标系(简称风轴系),体轴系是以飞机模型重心为原点,机体纵轴指向前、横轴指向右、竖轴指向上的三维直角坐标系,用OXbYbZb表示。风轴系是以飞机模型重心为原点,以正东、正北和铅垂方向建立的另一个三维直角坐标系,用OXwYwZw表示。而飞机的姿态角可以通过体轴系和风轴系之间关系来表示。模型绕横轴Xb转动,则纵轴Yb与OXwYw的夹角为俯仰角θ。模型绕纵轴Yb转动,则横轴Xb与OXwYw的夹角为滚转角γ。模型绕竖轴Zb转动,则纵轴Yb与OYwZw的夹角为偏航角ψ。体轴系和风轴系可以通过转换捷联T建立联系[4],如(1)所示:
(1)
系统的初始俯仰角和滚转角由加速度计确定[5],三轴加速度计的各轴分量为:
(2)
则:
(3)
初始偏航角可由磁强计确定,三轴磁强计的各轴分量为:
(4)
则:
(5)
此时所获取的姿态角为系统的初始粗值,并不准确,体轴系相对于风轴系的转动还可以用四元数Q来表示[4],即:
(6)
由姿态角计算出初始四元数:
(7)
在得出初始四元数之后,根据三轴陀螺仪的输出数据,通过四阶龙格库塔法求解微分方程:
⊗ω
(8)
其中:
(9)
ωx,ωy,ωz分别为模型载体3个轴的旋转角速度。其矩阵形式为:
(10)
得到更新后的四元数,并带入由四元数组成的捷联矩阵T,得到(11)式:

(11)
根据四元数和转换矩阵T的关系,得到姿态角计算公式:
(12)
但由于MEMS陀螺仪的角度解算误差会随时间而增大,故解算值并不能直接代表载体姿态,还需要用卡尔曼滤波进行处理,卡尔曼滤波算法是一种自递归线性最小均方误差估计,即通过上一时刻的最优估计值和当前时刻的测量值来计算当前的最优估计值。
滤波器的主要工作是根据陀螺仪测量信息与姿态角的关系建立系统的状态方程,根据加速度与重力场的关系和磁强度与地磁场的关系建立观测方程,并将四元数作为状态变量,用陀螺对上一步结果进行更新,再用加速度计和地磁传感器作为观测量来修正陀螺的结果,以达到对姿态角的最优估值,其数学过程详见文献[6]。
2 试验
2.1 系统硬件
试验中采用Xsens公司的MTi传感器,该系统是一种捷联式的MEMS传感器,具有结构简单、自主性强和稳定性较好的优点。该系统内置了三轴加速度计、三轴陀螺仪和三轴磁强计,并由低功耗的DSP进行Kalman滤波数据融合。
将该传感器安装在尾旋模型内部的基准平板上,并通过内置电池供电。由于尾旋试验中模型呈现旋转运动,无法从模型内部引线,故该系统采集基于Zigbee模式的无线数据传输方式,姿态数据通过RS232接口与Zigbee无线发射模块发射出去,接收模块接收后通过USB接口发送到测量计算机,测量计算机接收数据后根据相应的编码规则进行解码,从而获得所需的模型姿态等运动参数[7],如图2所示。
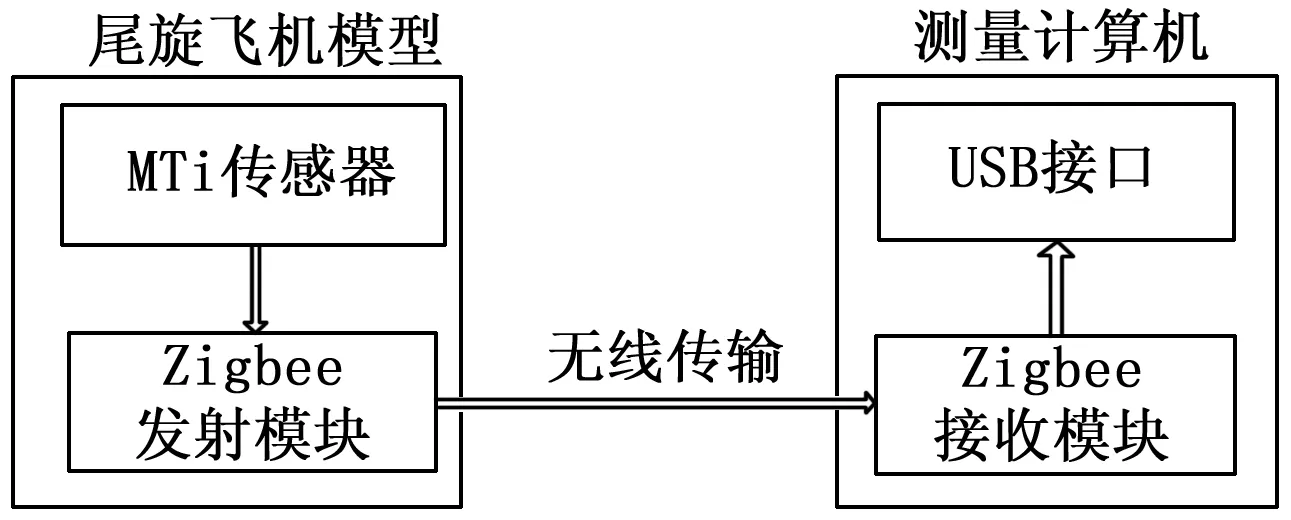
图2 数据传输流程
2.2 系统软件
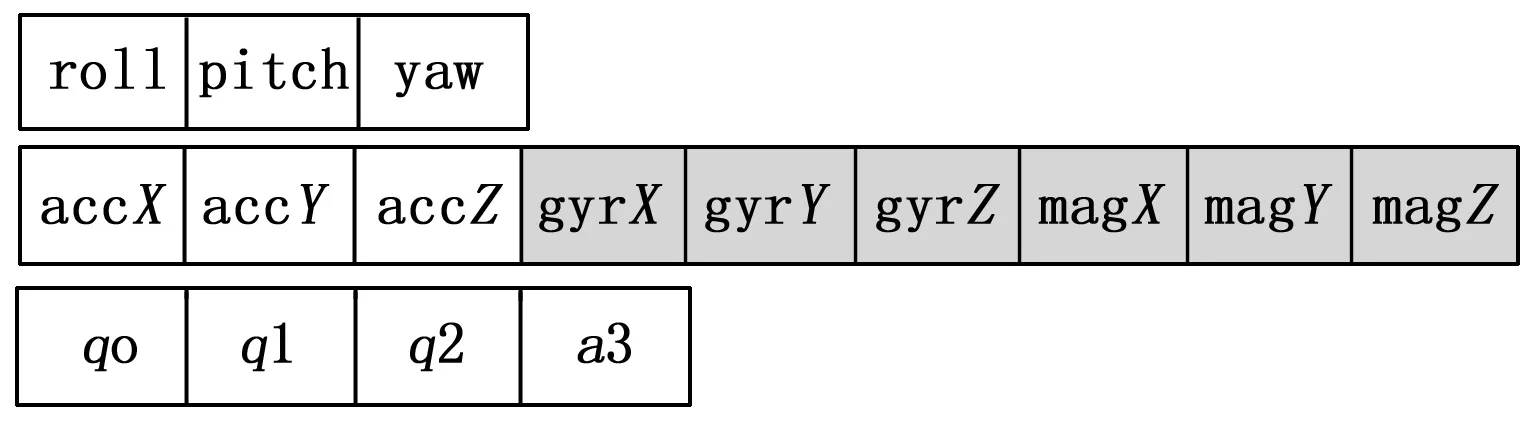
MTi传感器的软件主要用来设置无线传输的波特率、传感器数据的采样频率和输出数据的类型选择。波特率与无线传输模块要一致为57 600 Bd/s。采样频率为20 Hz。由于MTi传感器对于底层数据是开放的,因此输出数据可以有3种选择,分别是:姿态角、传感器原始数据和四元数。按照其特定的数据结构通过串口接收后进行解码获得所需参数。3种格式分别为:
将发射模块直接与MTi测量单元相连接,MTi测量单元上电后会自动进行初始化并自动向串口发送数据。通过串口调试软件测试发送的数据是否正确。系统软件实现流程如图3所示。
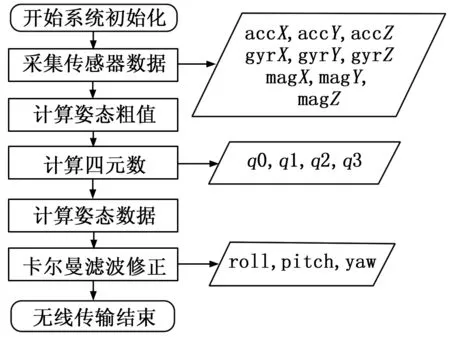
图3 软件实现流程
2.3 试验数据
图4为某型飞机模型的典型的尾旋试验数据,包括了尾旋运动的3个姿态角。
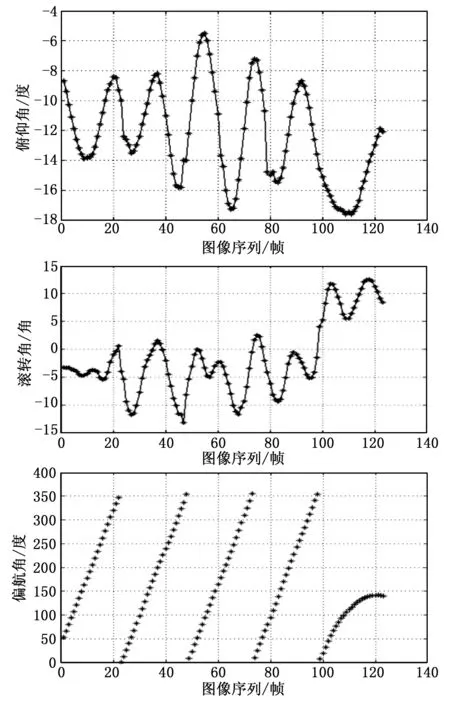
图4 典型尾旋数据图
在尾旋过程中采集了6秒钟的试验数据,从图中可以对尾旋运动状态进行分析,其中俯仰角的运动范围是-6~-18°,滚转角的运动范围是-13~12°,偏航角在0~360°之间循环,从姿态角数据反映出飞机模型处于振荡旋转的状态。
3 结论
应用MEMS传感器和ZigBee无线传输模块开展了尾旋试验姿态测量,系统稳定可靠,试验数据可以实时获取,提高了试验效率,该传感器的角度动态测试精度为1°,满足了试验需求,除姿态角外该传感器还能够提供角速度和加速度的数据,有利于对试验过程中的物理现象进行分析,且MEMS传感器具有体积小的优点,非常适用于在尾旋模型狭小的内部空间里安装,整套系统运行稳定,试验获得成功。
[1] 蔡春龙, 刘 翼, 刘一薇. MEMS仪表惯性组合导航系统发展现状与趋势[J]. 中国惯性技术学报, 2009,17(5):562-567.
[2] 李永富. 尾旋预测贯穿飞机研制的整个过程[J]. 流体力学实验与测量, 1999,13(4):32-35.
[3] 祝明红, 王勋年, 李 宝,等. φ5米立式风洞尾旋试验技术[J]. 实验流体力学, 2007,21(3):49-53.
[4] 宋丽君. 基于MEMS器件的航向姿态测量系统的研究[D]. 西安:西北工业大学, 2007.
[5] 李佩华. 基于MEMS惯性器件的捷联式姿态测量系统的研究[D]. 沈阳:沈阳航空航天大学, 2013.
[6] 周树道, 金永奇, 卫克晶,等. 采用卡尔曼滤波算法的MEMS器件姿态测量[J]. 实验室研究与探索, 2015,34(2):38-42.
[7] 蒋 敏, 宋 晋, 李 睿,等. 组合式航姿参考系统在尾旋测量中的应用[A]. 空气动力学会测控技术六届六次测控学术交流会论文集[C]. 2015(9):240-243.
Attitude Measurement of Spin in Wind Tunnel Based on MEMS Sensor
Song Jin, Jiang Min , Li Rui, Yang Hongsen, Yan Lai
(Low Speed Aerodynamics Institute,China Aerodynamics Research & Development Center,Mianyang 622762, China)
Spin is a kind of dangerous flight state when aircraft loses control, and it can easily cause flight accident. In order to improve flexibility and anti-spin capability in aircraft development process, the limit flight state must be studied. It is the most efficient and safe technology to carry out spin test in vertical wind tunnel. The required test parameter is a attitude angle (including pitch, yaw and roll). It briefly introduces the algorithm of attitude data fusion algorithm by gyro, accelerometer and magnetometer, and adopts a MEMS sensor to measure the spin attitude. The test data is transmitted to computer by Zigbee wireless module. The test proves, the technology is simple and effective, and is not limited by the environment of the scene, dynamic performance of the system is stable and reliable, angle measurement accuracy is better than 1° to meet the test requirements, improves the test efficiency and data quality.
spin test; attitude angle; MEMS sensor
2016-05-26;
2016-07-01。
宋 晋(1983-),男,陕西咸阳人,硕士,工程师,主要从事低速风洞测控技术方向的研究。
1671-4598(2016)12-0001-02
10.16526/j.cnki.11-4762/tp.2016.12.001
TP212
A
