基于VeriStand的实时飞行测试系统设计与实现
2017-01-16丁军辉
丁军辉
(91851部队,辽宁 葫芦岛 125001)
基于VeriStand的实时飞行测试系统设计与实现
丁军辉
(91851部队,辽宁 葫芦岛 125001)
针对飞行器改装带来的实时模飞测试问题,提出了一种实时飞行测试系统设计及实现方案;首先分析了待测飞控及安控系统的工作过程和技术特性,给出了实时测试系统应该具备的功能;基于功能需求,明确了系统采用PC上位机-PXI实时下位机的硬件架构,同时给出了上位机、下位机的硬件资源配置;系统采用VeriStand、MathWorks Simulink®、LabVIEW分别完成实时测试项目配置与管理、实时模型开发、虚拟串口设备驱动开发任务,并详细讨论了实时模型和虚拟串口设备驱动的开发过程;最后分析了实时测试结果。
VeriStand;实时;飞行测试系统
0 引言
某型飞行器因改装需要,重新设计了飞控模型和安控模型,新研了飞行控制计算机、安全控制计算机、嵌入式飞控及安控软件等。开发过程中,除进行计算机单机地面试验和软件评测外,还需采用实时飞行测试系统闭环动态测试模型、软件、设备、软硬接口等设计、实现的正确性和系统工作协调性[1-3],为此开发了本实时飞行测试系统。
1 功能分析
改装后的飞行器采用自动驾驶仪体制,由三自由度框架陀螺仪敏感飞行姿态,高度表测量飞行高度,航向、俯仰、倾斜、高度信号均以模拟电压形式送给飞行控制计算机;采用北斗定位设备测量飞行器质心位置,并按照指定数据格式将定位信息送至安控计算机,供安控计算机实时监控飞行器是否在给定航区内飞行;飞行器共配置八套舵机,每套舵机以模拟量电压形式输出舵偏角反馈信号。飞行器自动控制系统如图1所示。
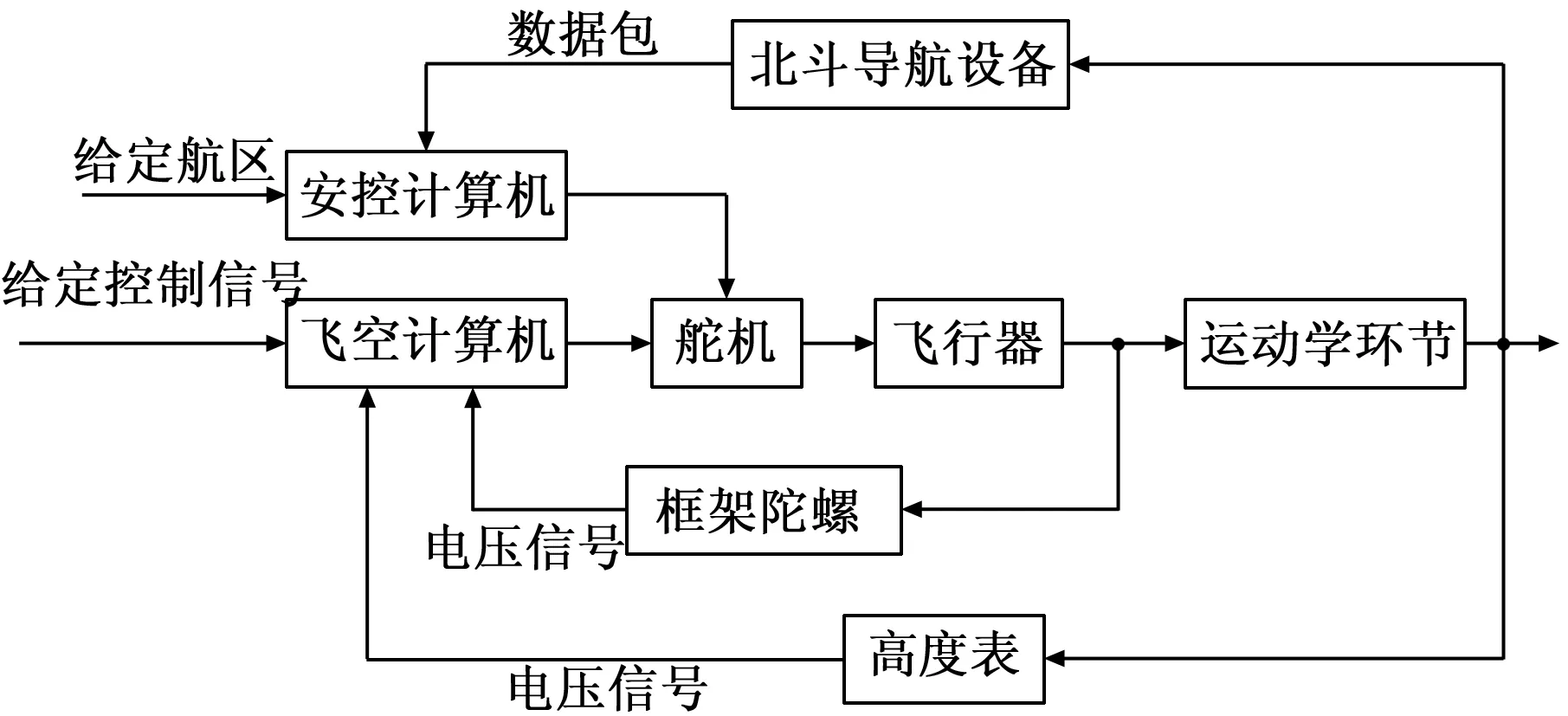
图1 飞行器自动控制系统框图
由图1可知,为了在地面动态检验飞控与安控计算机的模型、软件、设备、软硬接口等,实时飞行测试系统必须具备以下功能:
1)具备飞行器推力和质量变化规律解算功能。能实时给出飞行器当前的推力和质量,模拟实际飞行过程中因燃料燃烧或级间分离导致的飞行器质量变化过程。
2)具备飞行器六自由度动力学和运动学解算功能。能够根据当前的舵偏角计算出飞行器操纵力矩,能够根据当前气动力、推力、质量分布、力矩等解算出飞行器的实时角加速度、角速度、线加速度、线速度。
3)具备信号或数据输入输出功能。能够以模拟量电压形式输出飞行器当前的姿态角和飞行高度,能够将当前的位置坐标打包成指定数据格式输出,能够实时采集八套舵机的舵偏角信号,接收或发出相关开关量控制指令。
4)飞行状态监控功能。能够实时显示、在线监测飞行测试系统的运行状态和输出数据,能够在线干预实时仿真过程,能够实时接收、存储飞控计算机、安控计算机的遥测输出数据。
具备上述功能的实时测试系统与被测对象对接后的系统框图如图2所示。
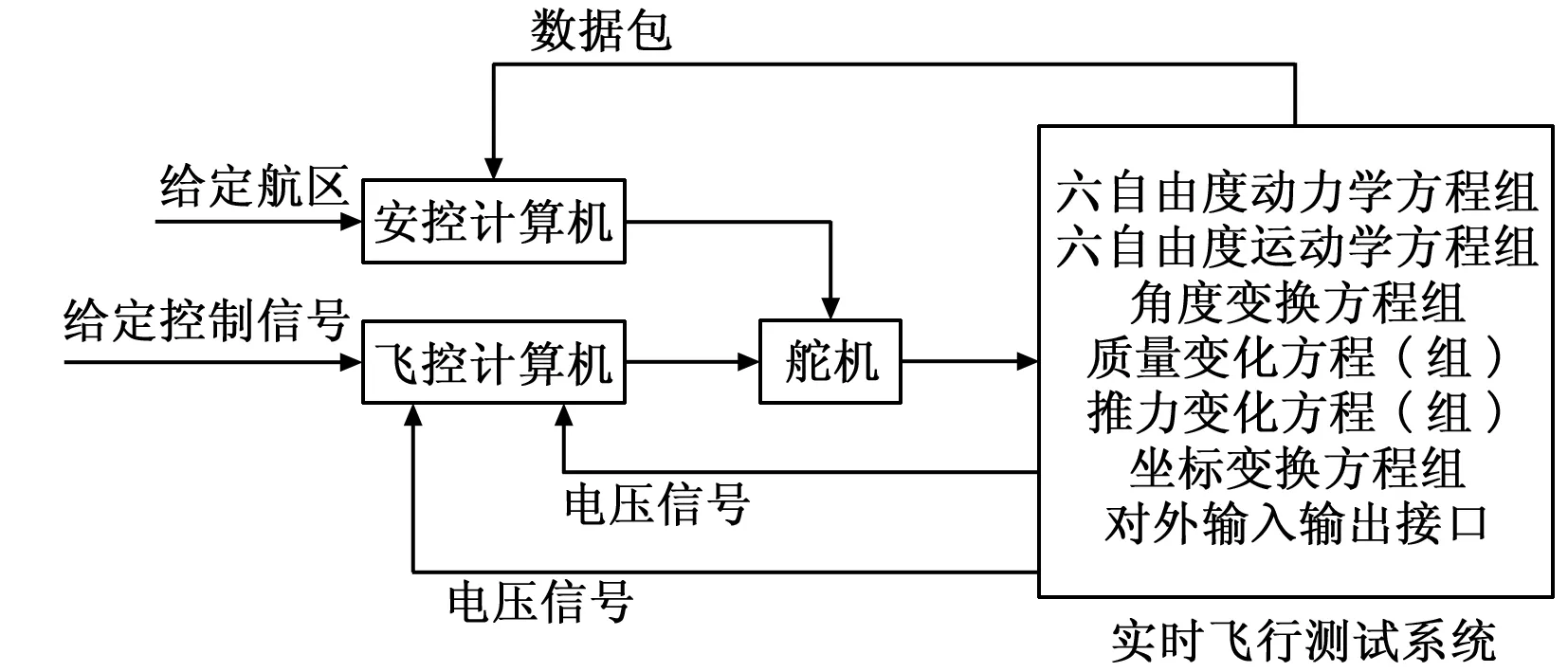
图2 飞行测试系统对接框图
3 硬件设计
本系统采用上位机开发部署、下位机仿真运行的工作模式[4-5]。由上位机、下位机、适配器、仿测电缆、直流电源五部分组成,系统硬件组成及连接如图3所示。

图3 系统硬件组成连接框图
上位机为一台具备网络通信功能的普通台式计算机,用于仿真模型开发、仿真测试项目配置与部署、监控/干预实时仿真测试过程等工作。台式机内部配置一块PCI结构的RS422接口卡,用于实时测试前向飞控、安控计算机发送控制信息,仿真过程中接收飞控、安控计算机输出的遥测数据信息。
下位机由NI公司PXI结构实时系统产品配置而成,包括PXI机箱、实时控制器(PXI-8109RT)、开关量输入输出模块、模拟量输出模块、模拟量输入模块、RS422通信模块、配套电缆等,负责运行仿真模型和提供与飞控计算机、安控计算机、舵机等设备交互的开关量、模拟量、数字通信接口。
适配器为非标设备,在仿真系统中起承上启下作用,用于完成所有实时测试信号的转接、分压、隔离等适配任务,对外面板设计供电、启动等手动开关和关键信号指示灯、电流电压数字表头等组件。
4 软件设计
4.1 基于VeriStand的实时软件开发过程
VeriStand是NI公司推出的实时仿真管理软件,运行在Windows操作系统上。它简单易用,无需编程即可完成实时测试系统的创建,实现HiL(Hard-In-Loop)测试中所需的各种功能[6]。软件能够以统一的人机接口接收、识别、配置由LabVIEW、MathWorks Simulink®等多种建模环境开发的控制算法、仿真模型及其它任务,配置完成后的仿真项目可以透明地部署到运行VxWorks或PharLap操作系统的下位机上。
本系统的开发过程如下:
1)采用MathWorks Simulink®开发实时模型软件并进行离线仿真,确定实时软件逻辑正确性,设置对外接口,选用ode4(Runge-Kutta)求解器,配置为定步长模式,编译并生成*.dll文件。
2)在LabVIEW环境下开发RS422实时数据通信驱动程序,配置并生成实时引擎。
3)在VeriStand环境中导入*.dll模型文件,将模型对外输入输出接口分别与PXI模块上的硬件通道进行关联映射,将模型对外输出的数字量接口变量与虚拟串口设备输入接口一一映射。
4)在VeriStand环境下设计虚拟监控面板,关联虚拟仪器控件至模型参数或硬件通道,实现实时监控及在线交互。
5)将配置完成的实时模型项目部署到下位机上,利用虚拟监控面板启动、停止、监控实时测试系统运行。
4.2 实时模型设计
实时模型部署后运行在下位机的PharLap系统上,总体上由功能模块、对外接口两部分组成。
功能模块由飞行器运动及动力学模块、质量及推力模块、控制角计算模块、舵角度分配模块、坐标变换模块组成,模块之间的数据传输直接通过信号连接线完成,实时模型对硬件模拟量、开关量、自定义串口设备、面板控制量的接口利用Simulink Library中的NI Veristand IN和NI Veristand OUT分别标注为输入和输出通道。完成后的实时模型软件如图4所示。
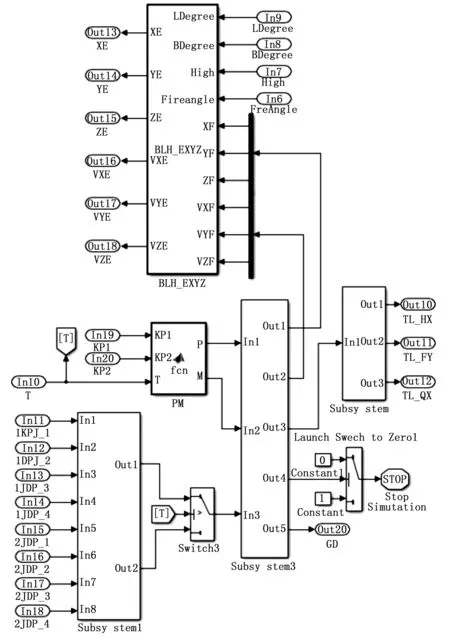
图4 实时模型
模型中,TL_HX、TL_FY、TL_QX、GD分别与硬件模拟量输出通道对应以电压形式输出航向/俯仰/倾斜/高度信号,*DPJ_*分别对应于八个模拟量输入通道接收八套舵机的舵偏角电压信号,T与系统仿真时间关联作为实时测试的时间轴,XE、YE、ZE、VXE、VYE、VZE关联到虚拟串口设备的输入接口以实时输出位置数据帧至安控计算机,图4中其余输入变量分别关联至虚拟监控面板对应控制量。
4.3 实时RS422数据通信驱动设计
VeriStand提供了对PXI实时计算机中硬件开关量、模拟量通道的直接驱动支持,在VeriStand环境下通过手动配置模型软件输入输出通道与模块硬件通道的映射关系,即可完成软件对硬件接口的驱动设置。但该软件未提供对实时PXI系统中串口的直接驱动支持,提供了广义的自定义设备架构,允许用户在第三方平台下开发对RS422、CAN等数字接口的驱动软件,导入VeriStand后作为具备特定功能的接口驱动使用。
本系统基于LabVIEW平台开发了RS422实时通信驱动,以完成发送位置数据帧至安控计算机的任务。该驱动具备两个功能,一是接收模型软件输出的飞行器位置坐标并转换为指定的数据帧格式,二是能够在PharLap环境下经指定的串行端口定时输出位置数据包。
LabVIEW下实时串口自定义设备驱动包括初始化、主面板、远程驱动三部分。
初始化程序完成串口自定义设备数据映射接口的定义和显示,只在VeriStand环境下使用。本虚拟串口设备共设计7路输入通道,分别用于接收实时模型输出的飞行器当前坐标(XE,YE,ZE)、当前速度(VXE,VYE,VZE)和仿真运行时间T,无输出通道,所有输入通道均为float类型,默认值为0,设计完成后的初始化程序图见图5。
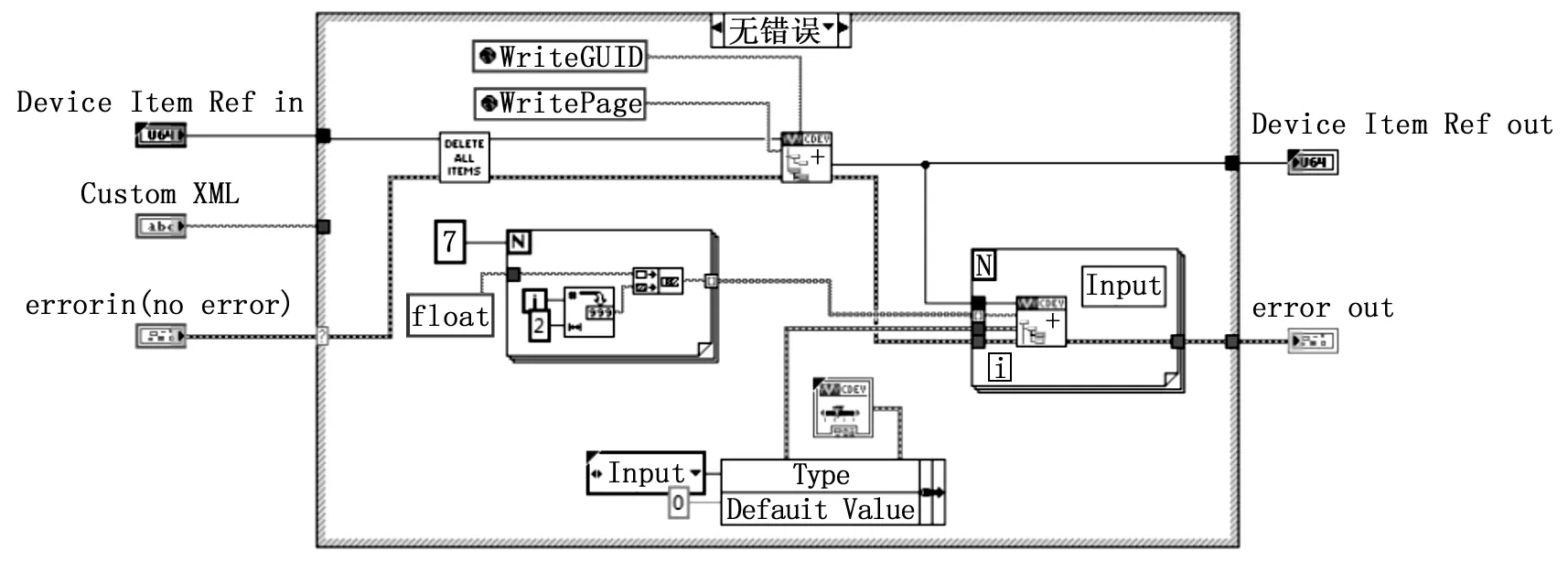
图5 初始化程序框图
主面板用于在VeriStand环境下显示和设置虚拟串口设备的端口号、波特率、起始位、停止位、数据位、校验等信息,上述信息随实时软件部署到下位机后,远程驱动即以该信息初始化物理串口。程序采用事件结构实现,捕捉到参数值更改事件后即以更改后的参数值作为新值使用,程序核心如图6所示。
远程驱动程序运行于PharLap实时系统下,是虚拟串口设备的核心程序,包括串口初始化(图7)、数据接收与帧格式生成和数据帧发送(图8)三部分。

图6 串口配置程序框图 图7 串口初始化程序框图
串口初始化程序以部署后的串口设置信息初始化串口。PharLap系统下数据发送的本质是利用一定时Data Loop,周期性地从RT fifo中读取由自定义设备接口接收到的飞行器位置数组,经数据帧生成子程序生成字符串,然后利用VISA 串口控件将字符串经指定串口发出。数据接收与帧格式生成和数据帧发送程序(单周期)如图8所示。

图8 数据接收、帧生成与发送框图(单周期)
5 实时飞行测试试验
实时飞行测试系统通电工作状态的数据流图见图9。
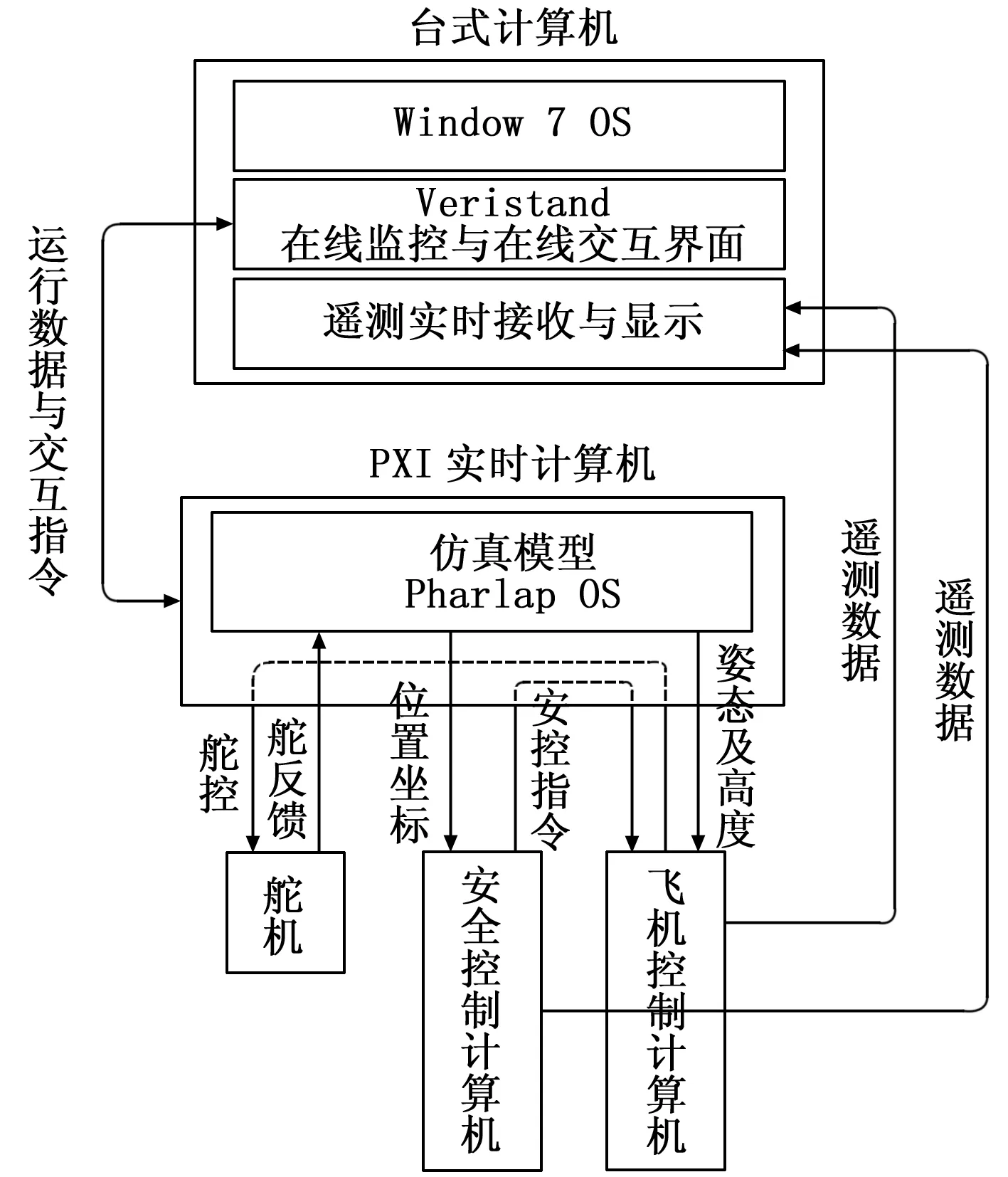
图9 系统运行状态数据流图
PXI计算机实时进行飞行器受力、力矩、质量、运动计算和坐标、角度变换等,并通过模拟量、数字量接口输出姿态、高度、位置、运行状态等信号,通过模拟量接收舵角度信号。
图10为一次高度机动模飞试验时PXI计算机输出的飞行器攻角变化情况,从数据上看,实时飞行测试系统稳定飞完全

图10 PXI实时计算机输出的攻角数据
程,信号传递极性和数值无误,飞行时间连续,系统性能满足被测飞行器模飞测试对实时性、接口的性能要求。
5 结论
由VeriStand、PC上位机-PXI架构下位机实现实时飞行测试系统可充分发挥实时模型开发平台多样化和PXI硬件资源丰富的优点,充分利用已有的模型成果,降低开发工作量和项目难度。
经过示波器监测,本系统运行时间十分准确,完全可满足毫秒级的实时测试需要。串行数据通信数据帧打包、发送性能可靠,无丢帧、误码现象,可广泛应用到实时动态测试和系统模飞任务中。
[1] 张妍懿,金振华,熊 溪,等. 基于VeriStand的混合动力快速原型控制系统[J].电子测量技术,2014(8):132-135.
[2] 曹 晖,毕建峰.基于PXI总线的实时综合测试系统研究[J].上海航天,2011(3):64-68.
[3] 徐海运,朱 红,张 翔,等.飞行器模飞综合测试系统设计[J].计算机测量与控制,2015(4):1158-1160.
[4] 刘 敏,刘藻珍.航空弹药控制系统半实物仿真试验系统设计[J].弹箭与制导学报,2004,(s2):10-12.
[5] 刘 雪,周胜良.基于VxWorks实时操作平台的半实物仿真试验测试系统设计[J].测控技术,2015(10):107-113.
[6] 廖新涛,李秀娟,李春涛.某大型无人机实时仿真系统的快速原型设计[J].计算机测量与控制,2015 (9) :3182-3184.
Design and Realization of Real-Time Flight Testing System Based on VeriStand
Ding Junhui
(Unit 91851 of PLA, Huludao 125000, China)
In order to solve the problem of real-time flight simulation test of the modified vehicle, a design and realization scheme of real-time flight test system was proposed in this paper. The working process and technical features of flight control system and safety control system that would be tested was analyzed firstly and the function of the real-time test system was listed. Based on the function demand, the hardware structure was suggested that the system should be composed by PC and PXI real- time computer, at the same time, the hardware resource was advised. The configuration and management of real-time test project, the software of real-time model, the driver software of the virtual series interface equipment in the system was respectively developed by VeriStand, MathWorks Simulink®, LabVIEW, the development process of the real-time model software and the virtual series interface equipment software was discussed detailedly. The real-time test results was analyzed finally.
VeriStand;real-time;flight-test system
2016-07-27;
2016-08-11。
丁军辉(1979-),男,河南人,硕士,工程师,主要从事飞行器控制系统设计与检测方向的研究。
1671-4598(2016)12-0110-03
10.16526/j.cnki.11-4762/tp.2016.12.031
TP216
A
