基于μC/OS-Ⅲ的喷雾结冰控制系统的设计
2017-01-13范蟠果米晓亮余书宝邢保毫
范蟠果,米晓亮,余书宝,邢保毫,王 婷
(西北工业大学自动化学院,西安 710129)
基于μC/OS-Ⅲ的喷雾结冰控制系统的设计
范蟠果,米晓亮,余书宝,邢保毫,王 婷
(西北工业大学自动化学院,西安 710129)
结冰是影响飞机安全飞行的重要因素,在某一型号飞机投入使用前,需要对该飞机除/防冰系统的性能进行验证;因此,研制了一套基于μC/OS-III的机载喷雾结冰控制系统;给出了系统的整体结构框架及其组成,重点介绍了该控制系统的硬件及软件的设计思路;系统实现了对喷雾设备的水、气路温度及压力的自动调节,在此基础上,还具有参数监测与显示、系统报警、数据分析与保存等功能;试验结果表明,该控制系统具有运行稳定、实时性好、调节速度快、控制精度高等特点,可以使用该系统进行喷雾结冰试验来考察某机型除/防冰系统的工作性能。
除/防冰系统;喷雾结冰;μC/OS-III;性能验证
0 引言
飞机在飞行过程中如果遇到结冰大气环境,则容易在迎风部件表面结冰。飞机结冰后,不仅重量加重,气动外形也受到影响,使得飞机飞行时阻力增大,操纵性和稳定性下降,严重时还可能出现严重的飞行事故。
现代飞机均装有除/防冰系统,但具体性能如何,最好的办法就是通过飞机冻云结冰试验来验证。因此,研制一套机载喷雾结冰控制系统,在空中进行人造冻云结冰试验(人造冻云结冰试验即用一架飞机在飞行过程中进行人工喷雾,试验飞机跟随飞行进行冻云试验)可在一定程度上发现飞机除/防冰系统的设计缺陷,为设计缺陷的更正提供依据,对提高飞机结冰气候环境的适应能力及保证飞行安全具有重要意义[1]。
1 系统整体框架
喷雾结冰控制系统根据人机界面上水、气路温度及压力的设定值对这些参数进行调节,水气混合并喷出以模拟空中自然结冰气象条件,完成喷雾结冰试验任务。该系统由传感器及作动机构、输入输出硬件电路、嵌入式微控制器及人机界面四部分组成。
系统总体结构如图1所示。
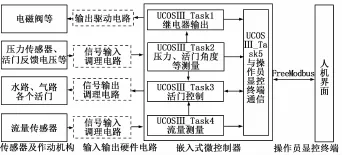
图1 喷雾结冰试验系统总体结构图
1.1 传感器及作动机构
传感器及作动机构包含水气路的温度、流量、压力等传感器以及模拟阀、电磁阀和三相电机等,负责系统参数的采集以及控制系统的运行。
1.2 输入输出硬件电路
信号输入调理电路将系统传感器(包括压力、流量等)采集的参数及活门反馈值等转换为控制器可以识别的信号输入给微控制器;输出驱动电路根据控制器的输出信号驱动外部继电器、接触器、电磁阀以及活门等执行机构动作。
1.3 嵌入式微控制器
嵌入式微控制器的主芯片为STM32F103ZET6,上面移植有μC/OS-III操作系统以及Free Modbus协议,用于完成数据采集、控制逻辑以及通信的实现。
1.4 操作员显控终端
操作员显控终端为采用Labview开发的人机界面,与控制器以Free Modbus协议通信。该界面能以动画形式显示系统运行状态,并具备参数设置、历史查询、数据保存、系统报警等功能。
2 系统硬件设计
2.1 嵌入式微控制器设计
系统硬件设计的核心在于嵌入式微控制器,嵌入式微控制器主芯片采用基于Cortex-M3内核的STM32F103ZET6,芯片主频可达72 MHZ,内置512K的内存,该芯片上具有丰富的外设如USART、ADC、DAC、TIM[2 3]等,完全满足本系统的需求。
嵌入式微控制器的总体结构如图2所示。

图2 嵌入式微控制器总体结构图
2.1.1 传感器等信号输入调理电路
结冰喷雾控制系统采用的压力传感器等输出信号为0~5 V,但STM32的AD输入上限为3.3 V,因此系统设计有信号调理电路。为提高电路共模抗干扰能力并且抑制漂移,传感器信号输入调理电路采用上下对称的高共模抑制比放大电路[4]。
2.1.2 活门控制输出驱动电路
系统水/气路的活门角度调节范围0~90°所对应的电压为2~10 V,STM32的DAC输出的电压范围为0~3.3 V,因此需要将STM32的DA输出电压经运放得到稳定电压值后驱动达林顿管来控制活门转动。
2.1.3 流量传感器输入转换电路
结冰喷雾控制系统采用的LWGY-25流量传感器(219.492脉冲/升)输出信号为0~20 V低频方波,将该信号经运放的阻抗匹配和比例放大转化为0~3.3 V方波输入给STM32的TIM进行双边沿捕捉。
2.1.4 开关量输出驱动电路
喷雾控制系统中采用的泵接触器以及电磁阀等驱动电压为28 VDC,STM32的GPIO口输出高电平为3.3 V,需使用该电平驱动光耦实现对泵接触器或电磁阀的控制。
2.1.5 供电电路
飞机上直流电电压为28 V,经3个整流桥模块KBPC5010后降压至23.6 V,但STM32供电电压为5 V,因此系统采用MP2359型直流降压转换器进行电压转换。
2.1.6 EEPROM存储电路
系统运行时,一些必要数据需要进行保存,因此系统设计有AT24C02数据存储电路。
2.2 操作员显控终端硬件设计
操作员显控终端采用军品级加固计算机,CPU为Intel Core i7 3770T,主频2.50 GHZ,内存为4 G的DDR3,采用的硬盘为256G的固态盘,完全满足系统要求。
3 系统软件设计
系统软件设计包含两方面的内容,分别为嵌入式微控制器的软件设计和操作员显控终端的软件设计。
3.1 嵌入式微控制器软件设计
3.1.1 设计思路
早期的嵌入式系统中没有操作系统的概念,简单的嵌入式系统通常设计成前后台结构,这种结构实时性差,对那些实时性要求高的任务不可能立刻得到处理,另外由于后台程序是一个无限循环的结构,一旦在这个循环体中正在处理的任务崩溃,整个系统将会崩溃[5-6]。
本系统的嵌入式微控制器上搭载有μC/OS-III操作系统,在该操作系统上可以简单便捷的将机载喷雾结冰控制系统的总体功能划分为继电器输出、数据采集、活门控制以及Modbus通信4个子任务来实现,每个子任务相当于一个独立的线程。CPU的使用权在这4个线程之间不断切换,使CPU得到最大化利用,系统的实时性和稳定性显著增强。
3.1.2 主函数流程
系统主函数流程如图3所示。

图3 系统总体流程
如图3所示,在Main函数中首先对系统时钟、硬件完成初始化(包括串口、ADC、DAC、定时器等),然后调用系统初始化函数OSInit,初始化μC/OS-III的所有数据变量和数据结构,接下来创建一个起始任务start_task(优先级设定为3,为整个系统的最高优先级),该任务用于创建继电器输出、数据采集、活门控制以及Modbus通信4个任务,这4个任务优先级分别为4、5、6、7,最后调用OSStart函数,启动多任务,内核开始接管整个系统软件。
3.1.3 多任务实现流程
当start_task创建完继电器输出等4个任务后,将自身挂起,CPU的使用权在这4个任务之间不断切换,下面对这4个线程进行介绍。
1)继电器输出线程。该线程的作用在于:控制外部电磁阀的通断以及三相电机的启停。
2)数据采集线程。该线程的作用在于:获取传感器采集的参数值,如水路、气路的温度、压力信息。
3)活门控制线程。该线程为系统功能实现的核心,主要根据系统参数设定值及传感器测量值进行运算并调节水、气路活门,使得水路压力、温度及气路的压力、温度值与上位机界面的设定值保持一致。
4)Modbus通信线程。该线程为移植到STM32F103上的一个完整的Free Modbus协议,负责嵌入式微控制器和上位机界面通信的实现。
以上4个线程的工作流程如图4所示。

图4 各线程内部工作流程图
3.2 操作员显控终端软件设计
操作员显控终端界面基于图形化编程环境Labview开发而成,该显控终端具备参数设置、系统自检、系统状态的动画显示、系统预警、数据存储、生成报表、历史数据查询等功能。
3.2.1 总体流程
操作员显控终端总体工作流程如图5所示。
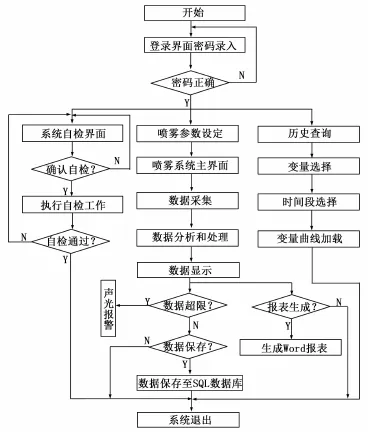
图5 操作员显控终端工作流程图
3.2.2 主要功能
1)动画显示:在喷雾结冰系统主界面提供了系统工作状态的动画显示,包括水/气路各参数、电磁阀和泵的接通状态及各活门转动情况等,操作员可在该界面方便直观地了解系统的各项参数及运行状态,该界面如图6所示。
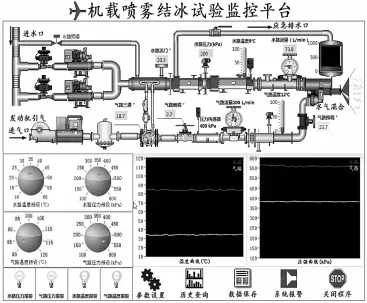
图6 系统监控平台主界面
2)系统报警:系统报警功能用于在系统出现紧急情况时,快速提示操作员系统的故障所在,使操作员采取措施应急处理,确保结冰飞行试验的安全进行。
3)数据存储:在结冰试验过程中将重要数据存至SQL,方便试验结束后相关人员分析实验结果。
4 试验结果及分析
该机载喷雾结冰控制系统是用来将水路温度、压力和气路的温度、压力调整至设定值,并将调好的水气混合后经喷雾耙喷出,完成喷雾结冰飞行试验,因此需要对该系统的调节速度和调节精度进行测试。
喷雾结冰试验机在空中执行飞行试验任务时,操作员在显控终端设定不同的系统参数值,来测试系统调节效果,飞行试验数据如表1所示。
基于表1的飞行试验数据对系统进行分析,可得如下结论:
1)系统水路温度的调节速度大于5.2℃/min,调节误差在1.02%内。
2)系统水路压力的调节速度大于24 kPa/min,调节误差在0.95%内。
3)系统气路温度的调节速度大于8℃/min,调节误差在1.02%内。
4)系统气路压力的调节速度大于22 k Pa/min,调节误差在1.01%内。
综上,系统各参数的调节速度和调节误差均达到了设计指标,符合设计要求。
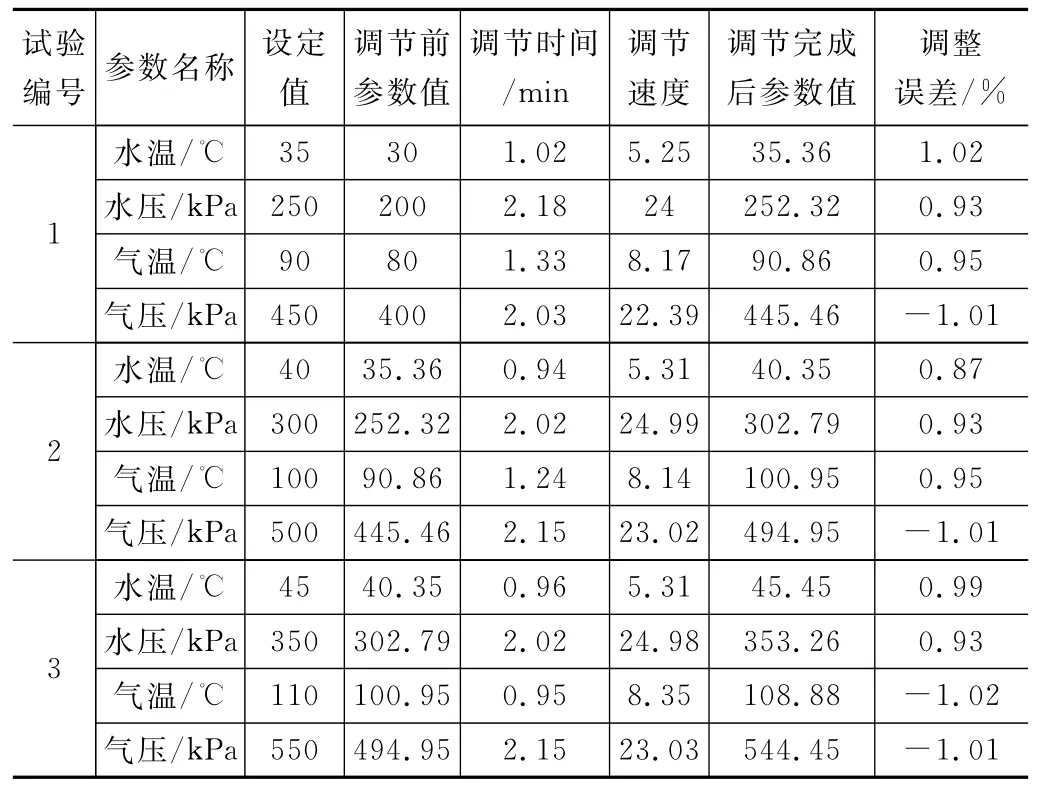
表1 喷雾结冰飞行试验数据结果
5 结束语
本文以飞机的喷雾结冰试验为项目背景,设计了一套基于μC/OS-III的机载喷雾结冰控制系统,详细阐述了控制系统的总体结构、组成部分及软硬件设计思路。喷雾飞行试验数据表明,该控制系统具有调节速度快、调节精度高等优点,可以使用该控制系统进行喷雾结冰试验来测试某机型的除/防冰系统的工作性能。
[1]唐 虎.飞机冻云结冰试验[A].中国航空学会.探索创新交流——第五届中国航空学会青年科技论坛文集(第5集)[C].中国航空学会,2012:6.
[2]刘慧英,范宝山.基于STM32的多步进电机控制系统研究[J].测控技术,2010(6):54-57.
[3]张卫星,张桂香,谭成午.基于STM32的环境多点监测系统设计[J].计算机测量与控制,2014(10):3141-3143,3164.
[4]王成华,王友仁,胡志忠,等.电子线路基础[M].北京:清华大学出版社,2008.
[5]Labrosse J J.嵌入式实时操作系统μC/OS-III[M].宫 辉,曾鸣,龚光华,等译.北京:北京航空航天大学出版社,2012.
[6]Saleh R F H.Synchronization-Oriented Scheduling Policy for Hard Real-time Task in Multi-core System Environment[D].University of Electronic Science and Technology of China,2015.
Icing Spray Control System Based onμC/OS-III
Fan Panguo,Mi Xiaoliang,Yu Shubao,Xing Baohao,Wang Ting
(College of Automation,Northwestern Polytechnical University,Xi′an 710129,China)
Icing is an important factor affecting the safety of aircraft flying,before a kind of aircraft putted into use,the performance of the aircraft’s anti-icing system needs to be verified.Therefore,a set of airborne icing spray control system based onμC/OS-IIIis presented.This kind of system is able to control spray device’s water and gas’s temperature and pressure automatically,moreover,the system has a display parameter monitoring,alarm systems,and data analysis and saving.Flight tests show that the system has advantages of high reliability,real time,adjust quickly,control precisely,so can be used to test the performance of the aircraft’s deicing/anti-icing system.
deicing/anti-icing system;spray freeze;μC/OS-III;performance verification
1671-4598(2016)08-0130-04
10.16526/j.cnki.11-4762/tp.2016.08.035
:TK264.1
:A
2016-03-17;
:2016-04-21。
范蟠果(1960-),男,陕西西安人,硕士生导师,副教授,主要从事计算机测控方向的研究。
