基于模糊切换增益调节的燃气流量滑模控制
2017-01-13李勇
李 勇
(中国空空导弹研究院,河南洛阳 471009)
基于模糊切换增益调节的燃气流量滑模控制
李 勇
(中国空空导弹研究院,河南洛阳 471009)
将模糊控制方法与滑模控制方法相结合,针对燃气流量调节伺服系统设计一种基于模糊切换增益调节的滑模控制器,固冲发动机流量调节伺服控制系统的不确定部分通过滑模控制器来补偿,从而可实现固冲发动机流量调节伺服系统的鲁棒控制;使用matlab对固冲发动机流量调节伺服系统进行建模仿真并与单纯使用滑模控制方法进行比较,仿真结果表明基于模糊切换增益调节的固冲发动机模糊滑模控制系统具有较好的给定适应性和抗干扰性,采用该控制方案能有效的抑制系统随机干扰对控制系统的不利影响,控制效果优于纯滑模控制方法,消弱了控制信号的抖振,为提高固冲发动机流量调节控制系统的动态性能奠定基础。
固冲发动机;流量调节;模糊控制;滑模控制
0 引言
性能高、体积小、射程远的先进战术导弹是各国导弹发展的一个重要分支。整体式固冲火箭发动机兼有固体火箭发动机和冲压发动机二者的双重优点,比冲高、结构轻巧、工作可靠、使用方便,能满足新型战术导弹的要求[1 3]。
由于导弹射程的大幅度提高和发动机各种性能的充分实现与整体式固体火箭冲压发动机的燃气流量大范围可调密不可分。因此,目前燃气流量调节技术是国内外研究的热点。
1 固冲发动机燃气流量控制方案
固体火箭冲压发动机燃气流量控制方案大部分是利用机械阀门调节燃气发生器的喷喉截面积来控制燃气发生器的内部工作压力,从而实现燃气发生器的燃气流量可控[4 5]。
流量调节装置工作原理如下:伺服电机根据控制信号大小转动,通过一系列的减速机构带动调节轴和调节板转动,从而改变喷管通气面积,燃气发生器燃气压力随之改变,达到调节流量的目的。同时采用电位器检测调节轴的转动角度,构成角度反馈控制系统[6]。众所周知,对于考虑外界扰动等不确定性因素的控制系统,滑模控制具有设计简单、鲁棒性强、快速响应等优点,因而在实际工程中获得了广泛应用。但它要求不确定性必须满足匹配条件,而模糊控制作为一种有别于传统控制理论的控制方法,充分发挥其不需要对象数学模型、能充分运用控制专家的信息及具有鲁棒性的优点,在具有相关特点的控制领域表现出其优势,在一些复杂系统,特别是系统存在不精确和不确定信息的情况下,模糊控制的效果往往优于常规控制。因此,本文考虑将两者的优点结合起来,设计一种新颖的模糊滑模控制器,并基于典型工况进行仿真分析,证实了该方案的有效性[7]。
2 固冲发动机燃气流量控制系统结构
固冲发动机燃气流量位置伺服系统的执行元件由直流无刷同步电机构成,系统速度环和位置环控制采用数字控制,其工作原理是:通过给定值与当前实际的位置,计算出误差,并以该误差作为模糊滑模控制算法的输入,由该算法得出实际控制量,最终通过D/A转换器传送到伺服放大器中,由电路放大后,通过驱动器控制伺服电动机,从而经过减速机构调动机械阀门转动,从而改变调节轴的转动角度进而改变燃气发生器喷管通气面积。
假设一个实际的不确定伺服系统为:

假设系统满足匹配条件:

其中:E(t)包括不确定和外加干扰。

其中:θ和˙θ分别为角度和角速度。
状态方程式(3)可描述为:

其中:f(θ)=-a˙θ。

其中:η>0。
2.1 流量调节伺服系统滑模控制器设计
定义固冲发动机流量调节伺服系统全局滑模面[8]为:

其中:c>0,e为跟踪误差。
跟踪误差为:

其中:r为位置指令。
为了实现全局滑模,要求函数F(t)需要满足以下3个条件:
其中e0和˙e0为t=0时的位置误差及其导数。条件1)使系统状态位于滑模面,条件2)保证了闭环系统稳定,条件3)是滑模存在条件的要求。
根据上述分析,将F(t)定义为:

其中:λ>0,s(0)为初始时刻的s(t)。
设计滑模控制律为:

稳定性证明:
定义Lyapunov函数为:
在滑模控制律式(11)中,切换增益K(t)值是造成抖振的原因。K(t)用于补偿不确定项E(t),以保证滑模存在性条件得到满足。如果E(t)时变,则为了降低抖振,K(t)也应该时变。
2.2 流量调节伺服系统模糊控制器的设计
固冲发动机流量调节伺服系统滑模存在条件为:

当系统到达滑模面后,将会保持在滑模面上。K(t)为保证系统运动得以到达滑模面的增益,其值必须足以消除不确定项的影响。
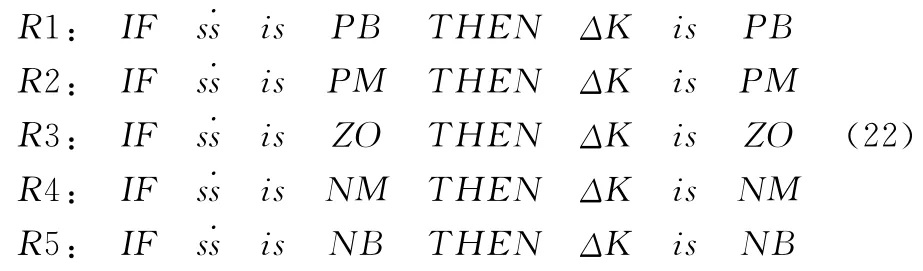
模糊规则如下:

其中:NB为负大,NM为负中,ZO为零,PM为正中,PB为正大。
模糊系统的输入输出隶属函数如图1和图2所示。
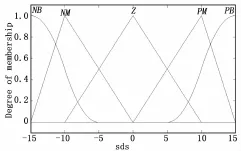
图1 模糊输入的隶属函数
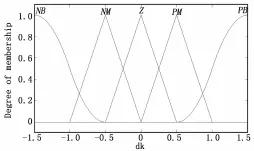
图2 模糊输出的隶属函数
选择如下模糊规则:
采用积分的方法对^K(t)的上界进行估计:
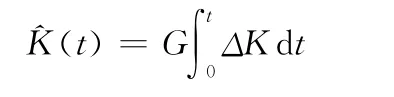
其中:G为比例系数,G>0。
燃气流量调节装置采用全闭环控制系统,其控制系统结构如图3所示。

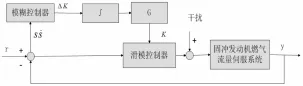
图3 燃气流量调节模糊滑模控制系统结构框图
3 燃气流量调节伺服控制系统仿真实例
固冲发动机燃气流量调节伺服控制系统为:

考虑不确定项E(t)为高斯函数的形式:

其中:取bi=0.50,ci=5.0,η=1.0,则控制器的切换增益为:K(t)=max(|E(t)|)+η=201。
E(t)如图4所示。
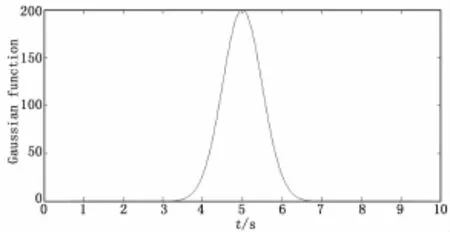
图4 高斯函数形式的不确定项E(t)
位置指令信号为r=A sin(2πFt),A =1.0,F=1.0 Hz。
采用控制律式 (24),取G=400,c=150,λ=10。
仿真时间为10 s,仿真结果如图5、图6、图7所示。
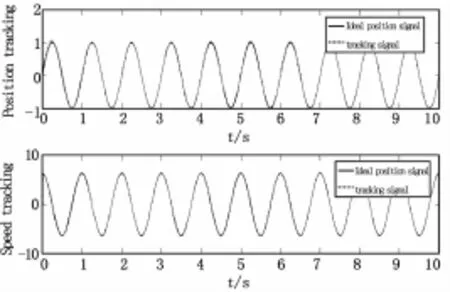
图5 燃气流量调节模糊滑模控制的位置及速度跟踪
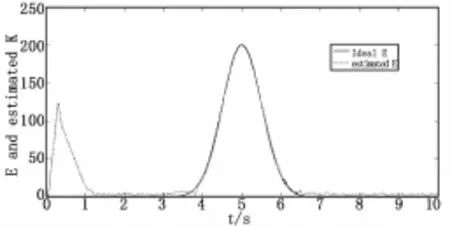
图6 E(t)及其估计值^K(t)
另外我们采用传统的滑模控制律式(11),其中取D=200,c=150,仿真结果如图8、图9所示。
对比图5~图9可以看出,采用基于模糊规则的模糊滑模控制方法,具备良好的动态性能和跟踪精度,在有外部干扰和参数摄动的情况下具有很好的鲁棒性,且控制量平滑,可有效地通过切换增益消除干扰项,从而消除抖振。满足固冲发动机流量调节伺服系统物理特性的要求。
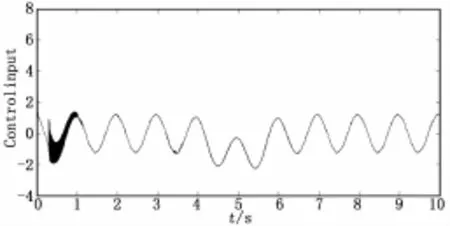
图7 模糊滑模控制输入信号
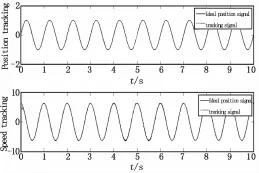
图8 燃气流量调节滑模控制的位置及速度跟踪
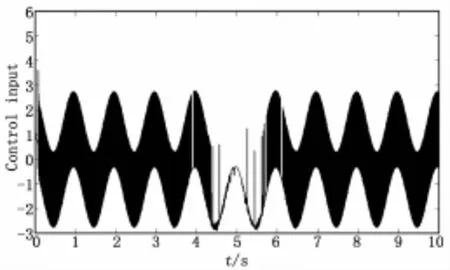
图9 滑模控制输入信号
4 结论
针对固冲发动机燃气流量调节伺服控制系统,为改善其控制性能、提高位置跟踪精度,本文采用基于模糊切换增益调节的滑模控制方法来设计相关控制算法对固冲发动机流量调节伺服系统的控制策略进行研究。在流量调节伺服系统动力学模型建立的基础上,对伺服系统的模糊滑模控制器进行了设计,并与单纯采用滑模控制器进行了数值仿真对比。
通过数值仿真的结果看出,引入基于模糊切换增益调节滑模控制方法后,可以有效地削弱系统控制信号的抖振,系统响应时间短而且无超调量,具有很好的鲁棒性,流量调节伺服系统的位置跟踪精度有了很大的改善,验证了该模糊滑模控制策略的有效性,也为固冲发动机流量调节伺服运动系统位置跟踪的研究奠定了一定的理论基础。
[1]龚 晰,何保成,刘志明.固体火箭冲压发动机发展与流量调节现状[J].飞航导弹,2015,2:74-78.
[2]赵泽敏,陈 雄,周长省,等.固体火箭冲压发动机燃气流量调节最优前馈控制[J].弹箭与制导学报,2014,34(3):109-112.
[3]Pinto P C,Kurth G.Robust propulsion control in all flight stages of a throtteable ducted rocket[R].AIAA 2011-5611.
[4]聂聆聪,刘志明,刘源祥.流量可调燃气发生器压力闭环模糊控制算法[J].推进技术,2013,34(4):551-556.
[5]周 俊,周长省,陈 雄.基于BP神经网络固冲发动机燃气流量调节控制 [J].计算机仿真,2015,32(1):56-59.
[6]兰飞强,王丽娟,程 翔,等.一种固冲发动机用流量调节装置设计[J].弹箭与制导学报,2012,32(3):148-151.
[7]刘金琨.滑模变结构控制MATLAB仿真(第一版)[M].北京:清华大学出版社,2006.
[8]李 勇,樊 丁.基于RBF神经网络的航空发动机模糊滑模控制研究[J].计算机测量与控制,2013,21(3):632-634.
[9]李玉忍,张智慧,徐健龙.飞机防滑刹车模糊滑模变结构控制研究 [J].西北工业大学学报,2015,33(1):45-48.
[10]魏世鹏,李 华.火箭炮位置伺服系统模糊自适应滑模控制[J].弹箭与制导学报,2014,34(6):161-164.
[11]王 琦,魏 秦,崔 巍.高超音速飞行器的模糊滑模变结构控制[J].南昌航空大学学报 (自然科学版),2014,28(3):14-21.
Design of Sliding Mode Control of Gas Flow Based on Fuzzy Change Gain Regulation
Li Yong
(China Airborne Missile Academy,Luoyang 471009,China)
By means of the fuzzy control and sliding mode control method combined,a sliding mode controller based on fuzzy change gain regulation is presented for gas flow regulation servo system.The uncertain section of solid rocket ramjet motor flow regulation servo control system is compensated by sliding mode controller,thus solid rocket ramjet motor flow regulation servo system achieve robust control.Solid rocket ramjet motor flow regulation servo system was modeled and simulated based on the use of MATLAB,and compared with sliding mode control method alone.The simulation results show that the solid rocket ramjet motor sliding mode control system based on fuzzy change gain regulation has preferable given adaptability and immunity to interference,which adopt fuzzy and sliding mode control method based on fuzzy change gain regulation can effectively inhibit the system random interference’s disadvantageous influence to control system and can weaken the chattering of control signal input,its anti-jamming ability and control result were better than sliding mode control method alone.Therefore,the proposed fuzzy and sliding mode control method lay the foundation for improvement of dynamic performance of solid rocket ramjet motor flow regulation servo control system.
solid rocket ramjet motor;flow regulation;fuzzy control;sliding mode control
1671-4598(2016)08-0111-03
10.16526/j.cnki.11-4762/tp.2016.08.030
:V435
:A
2016-03-03;
:2016-04-09。
李 勇(1980-),男,河南确山人,博士,工程师,主要从事固冲发动机能量管理、燃气发生器流量调节控制方法的研究。
