嵌入式毛巾织机送经卷取和起毛集成控制器的设计
2017-01-13王振中周其洪
王振中,周其洪,沈 琼
(东华大学 纺织装备教育部工程研究中心,上海 201620)
嵌入式毛巾织机送经卷取和起毛集成控制器的设计
王振中,周其洪,沈 琼
(东华大学 纺织装备教育部工程研究中心,上海 201620)
设计了基于ARM(advanced RISC machines)微控制器的送经卷取和起毛集成控制器.采用μC/OS-Ⅲ嵌入式实时操作系统,基于CANopen从站协议,控制器通过CAN总线和主控制系统进行实时通信.开发了基于RBF(radial basis function)神经网络整定的PID(proportion integration differentiation)张力控制算法,完成了天经轴、地经轴、卷取辊和起毛凸轮4个伺服电机的实时同步控制.调试运行结果表明,该送经卷取和起毛集成控制器可解决当前国内毛巾织机存在的纬密和张力控制不均等问题,满足了毛巾织机的高速化、数字化和智能化等发展要求.
毛巾织机; ARM(advanced RISC machines); 送经卷取; 起毛控制; μC/OS-Ⅲ
毛巾织机和普通织机不同,它多了一个天经轴[1],在织造过程中形成两种张力和纬密差异较大的组织,其送经卷取控制和一般经轴的送经卷取控制有明显区别.同时毛巾织物之所以有绚丽多彩的图纹花案与其形成毛圈的起毛动作是密不可分的[2].目前,国外高档毛巾织机普遍采用电子送经卷取和起毛,起毛高度和纬密可以自由设定和切换;国内毛巾织机主要存在毛圈品种受限、纬密不均匀、张力切换不稳定、容易出现反毛等问题,目前还没有集送经卷取和起毛一体的电子控制产品[3].为了适应毛巾织机的高速化、数字化和智能化等要求,设计了基于ARM(advanced RISC machines)微控制器、嵌入式实时操作系统μC/OS-Ⅲ的送经卷取和起毛集成控制器.
1 系统整体结构
毛巾织机的控制系统由主控制系统、送经卷取和起毛控制系统构成,整体结构如图1所示[4].送经卷取和起毛控制系统主要实现的功能有:实时采集地经轴和天经轴的张力;实时检测主轴编码器的转速和转角;实时与主控制系统通信;实时显示送经卷取和起毛过程中的工艺参数;精确控制天经轴、地经轴、卷取辊和起毛凸轮共4个伺服电机的动作.
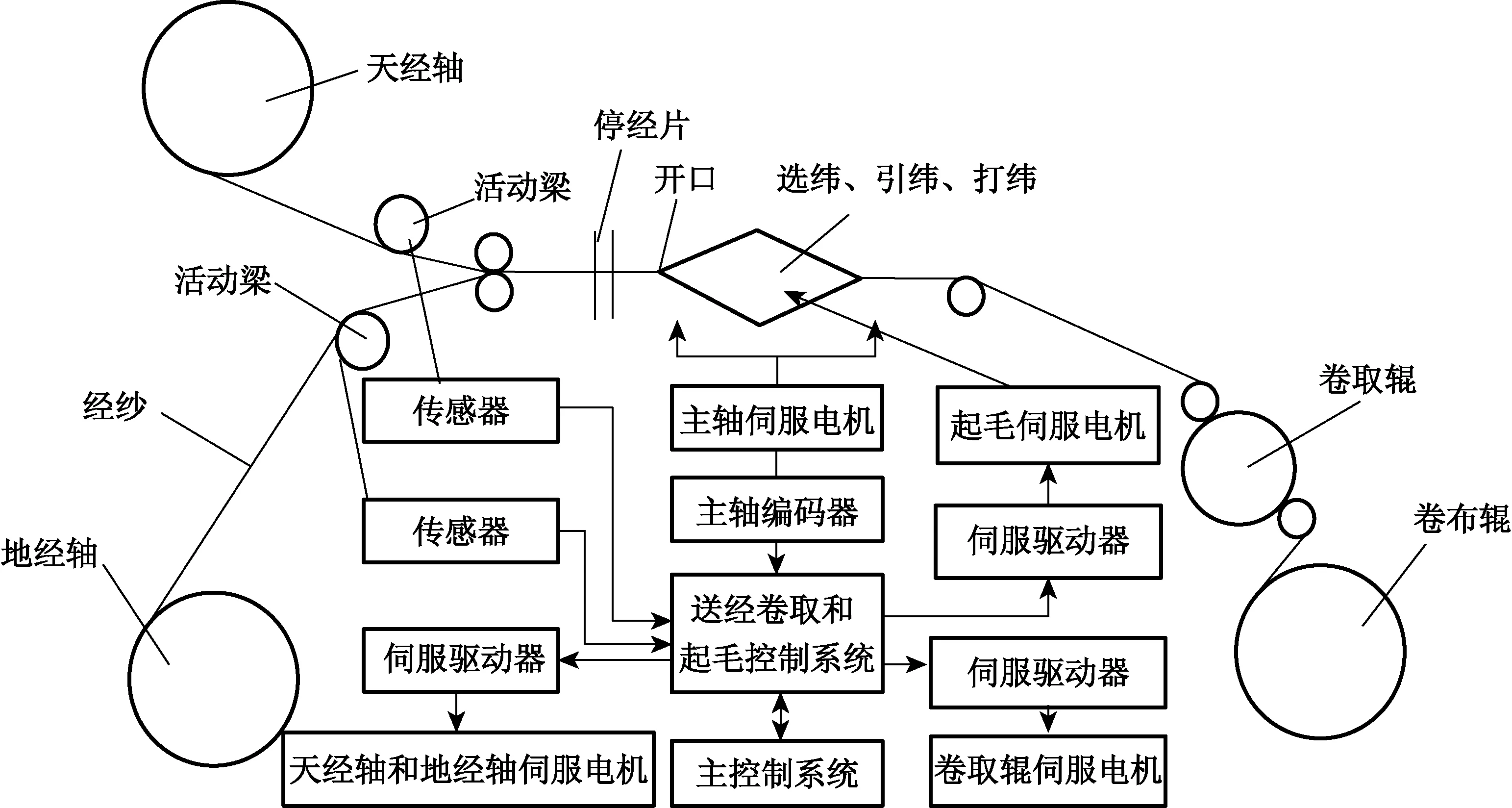
图1 毛巾织机控制系统整体结构Fig.1 The overall structure of control system of the towel loom
2 系统硬件设计
2.1 控制器芯片选型
本文采用以ARM Cortex-M3为核的意法半导体公司增强型32位大容量的STM32F103ZET6芯片,其最高工作频率为72 MHz,具有112个快速I/O端口、3个12位的模数转换器和11个定时器,其中高级定时器具有电机控制和增量编码器输入的通道[5],能很好地满足送经卷取和起毛集成控制要求.控制器的硬件结构如图2所示,其中,静态存储器电路和掉电保护电路[6]是拓展的,作用分别为实时保存运行工艺参数及系统代码、为静态存储器提供备用电源,保证重要数据不丢失.
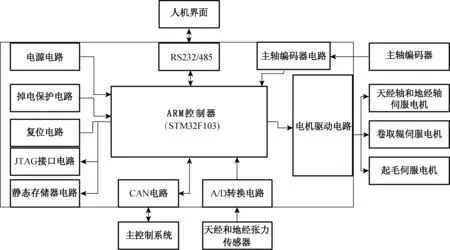
图2 送经卷取和起毛集成控制器硬件结构Fig.2 The hardware structure of controller integrated let-off,take-up and fuzzing
2.2 控制器部分外围电路
2.2.1 CAN通信电路
本文的CAN收发器选用高速PCA82C250芯片.为了隔离干扰,前置两片6N137高速光耦合隔离芯片.CAN电路如图3所示.
2.2.2 主轴编码器电路
为了抗干扰,编码器输出的A、B和Z三相脉冲信号经过光电隔离PS28014芯片,使用74HC14反相施密特触发器,以保证输出无抖动的脉冲.编码器电路如图4所示.
2.2.3 经纱张力采集电路
本文的经纱张力测试装置输出电压量程为10 V.A/D(模数)转换电路分两部分,前半部分使用运算放大器TL084,用其隔离张力传感器固有的输入阻抗;后半部分采用运算放大器LM258实现测量值的转换,以满足控制器3.3 V输入的要求.A/D转换电路如图5所示.

图3 CAN通信电路Fig.3 The CAN communication circuit
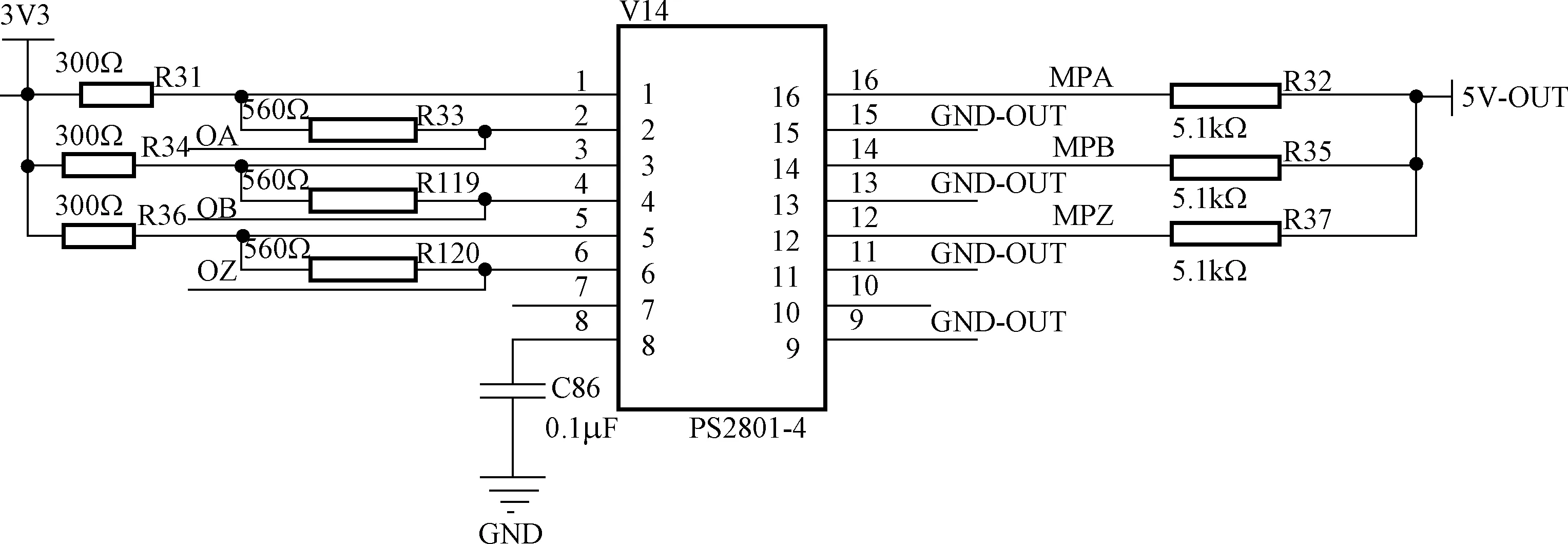
图4 编码器电路Fig.4 The encoder circuit

图5 A/D转换电路Fig.5 The A/D converted circuit
3 软件设计与实现
3.1 操作系统介绍
为了提高系统实时响应能力,本文采用Micriμm公司第三代μC/OS-Ⅲ嵌入式实时操作系统,其体积较小、源代码公开免费,是一种可裁剪、可固化和可剥夺型的多任务内核,最大优点是允许无限多个任务运行于同一优先级上和相同优先级的任务按时间片轮转调度[7].因此,该操作系统能满足送经卷取和起毛控制的多任务和高实时性要求.
3.2 内核移植
本文移植内核的版本为V 3.02,使用的固件库版本为V 3.5,编译软件是RealView MDK 4.12,需要修改一些代码[8].
3.2.1 配置处理器的固件库文件
修改startup_stm32f10x_hd.s启动文件,将文件夹中出现的PendSV_Handler的地方全部替换成OS_CPU_PendSV_Handler.
修改stm32f10x_it.c中断源文件,把原有的PendSV_Handler空函数注释掉,编写SysTick中断服务函数.
3.2.2 修改1个CPU文件
将CPU_A.ASM文件中的PUBLIC指令改为EXPORT.
3.2.3 修改3个内核文件
OS_CPU.H头文件声明注释掉OS_CPU_SysTickHandler()函数的声明和OS_CPU_SysTickInit()函数的声明,使用ST库函数提供的SysTick中断函数.
OS_CPU_AAS.M将原来的PUBLIC指令改为EXPORT.
OS_CPU_C.C源文件中注释掉函数OS_CPU_SysTickHandler()和时钟初始化函数OS_CPU_SysTickInit().
3.2.4 创建板级支持包
编写includes.h头文件和板级支持包(BSP)相关文件,包括BSP_Init()、SysTick_Init()函数和BSP.h头文件;创建任务包括编写app.c、app.h和main文件.
3.3 任务划分和实现
将系统划分为12个任务,如表1所示.
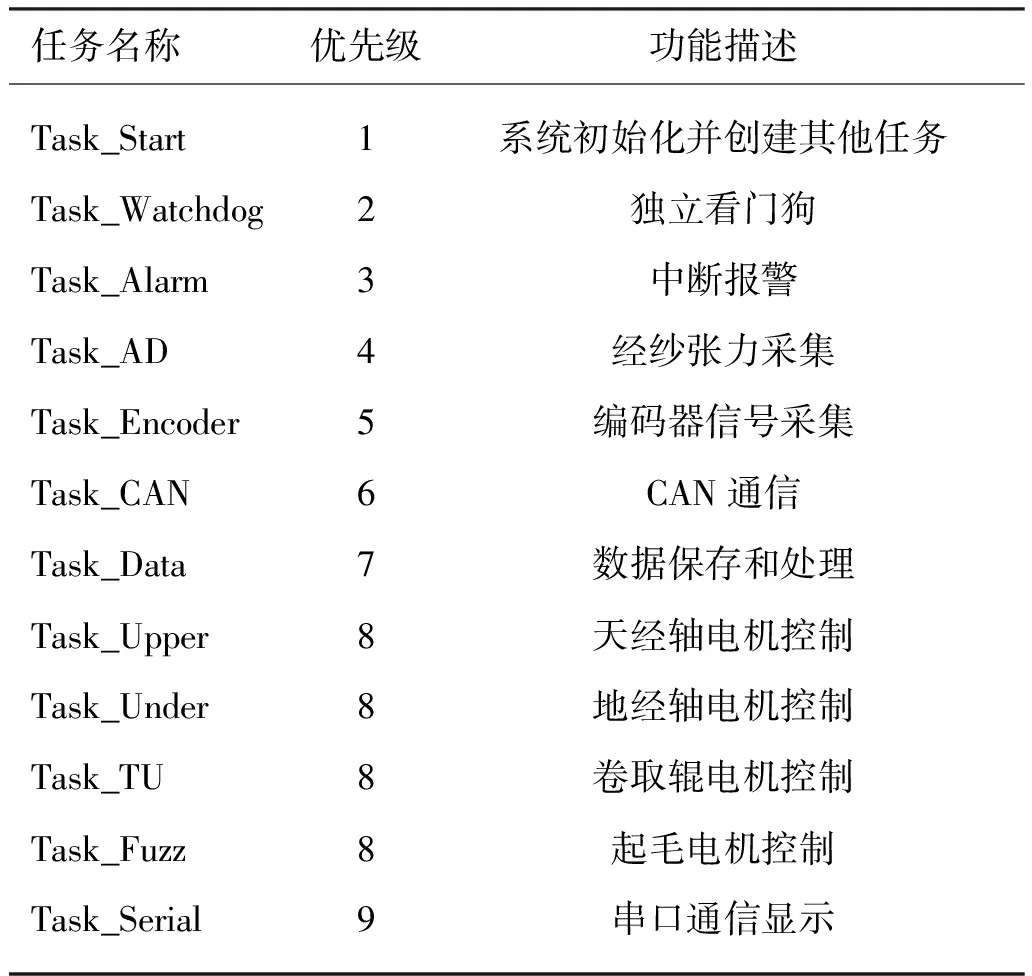
表1 任务划分Table 1 Tasks partition
3.3.1 天经轴和地经轴电机控制
天经轴和地经轴经纱张力是时变性、非线性和多扰动的,本文采用基于RBF(radial basis function)神经网络整定的PID(proportion integration differentiation)控制算法,计算得到相应的送经补偿量,向天经经轴和地经经轴伺服驱动器发出相应频率和数量的脉冲来调节转速,置相应端口高低电平控制伺服电机的转向,以保证经纱张力的动态稳定.
本文首先由main函数调用BSP.Init()函数进行板级初始化,再调用系统函数OSIint()初始化μC/OS-Ⅲ系统,最后调用函数OSTaskCreat().先创建初始任务Task_Start,在初始任务中创建其他11个任务,系统函数OSStart()使系统开始任务管理.图6为系统软件任务执行流程图.
3.3.2 CAN通信
本文采用CANopen协议通信模型中的主从模型, 将主控制系统设定为主站,送经卷取和起毛控制系统设定为从站.首先需将CANopen嵌入到μC/OS-Ⅲ系统中,主站向从站发送所需的工艺参数,从站向主站反馈运行状态.CAN通信任务流程如图7所示.
3.3.3 起毛电机控制
起毛电机主要改变钢筘的打纬动程,电机根据毛高和主轴转角的变化转动不同的角度.事先需规定电机的起始零度和转向的正负.图8为起毛凸轮电机控制流程图.

图6 系统软件任务执行流程图Fig.6 The flowchart of system software tasks execution
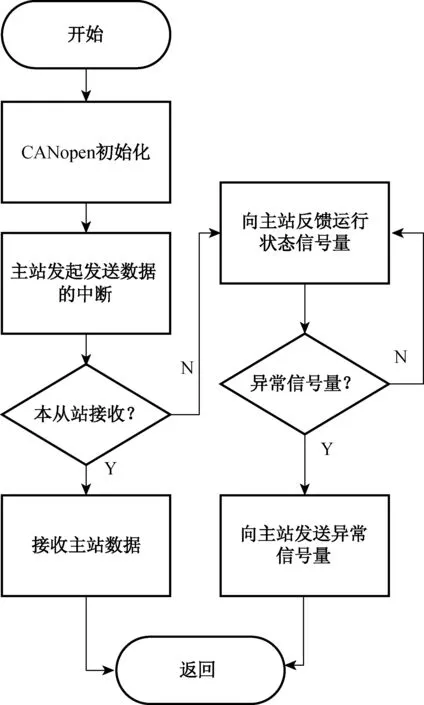
图7 CAN通信流程图Fig.7 The flowchart of CAN communication
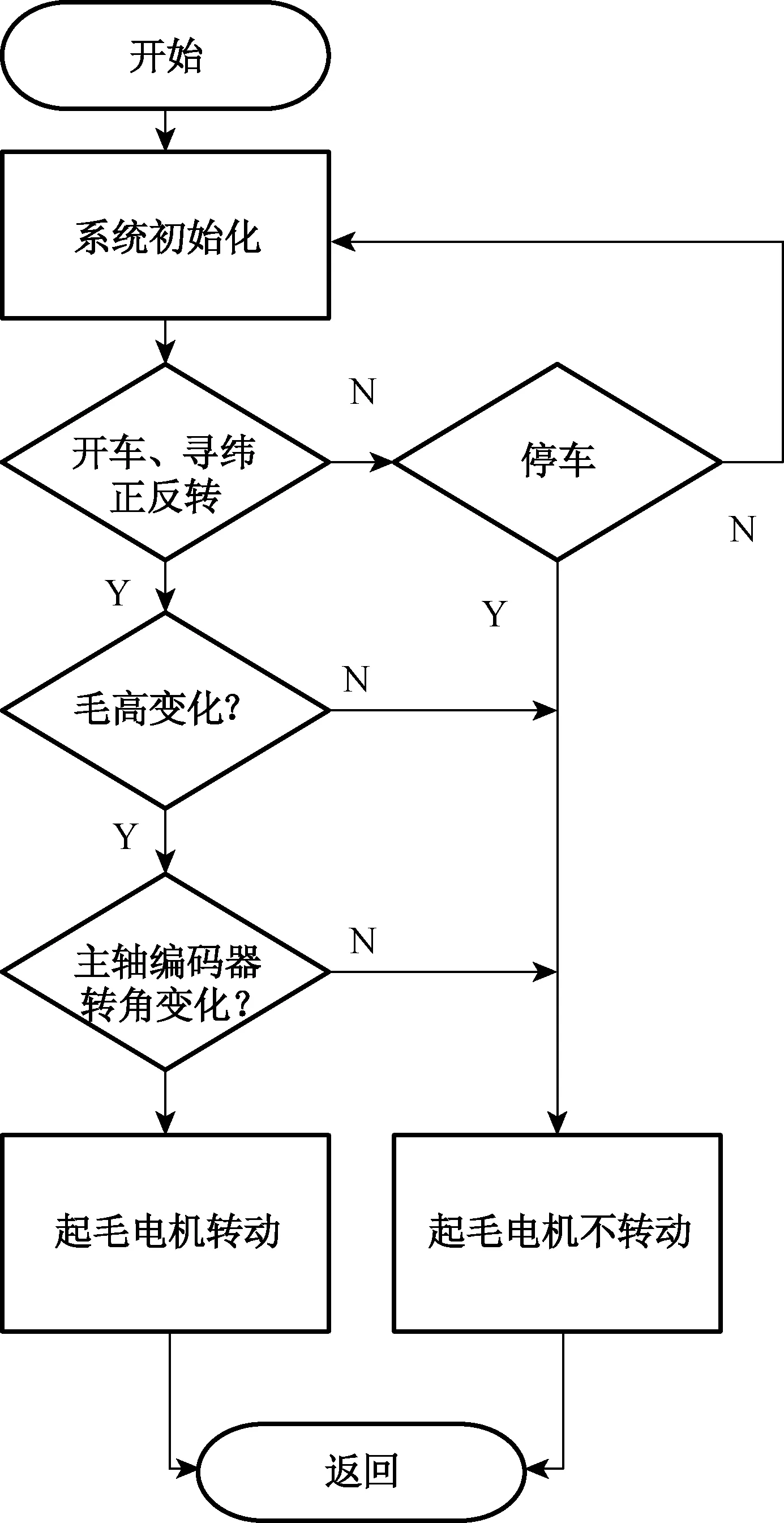
图8 起毛电机控制流程图 Fig.8 The flowchart of fuzzing cam motor control
4 结 语
本文针对当前毛巾织机送经卷取和起毛存在的问题和发展趋势,设计了基于ARM微控制器和嵌入式实时操作系统μC/OS-Ⅲ的送经卷取和起毛集成控制器.从硬件和软件两个方面详细介绍了整个系统的设计方法,调试运行的结果表明,该控制系统响应速度快、控制精度高、实时性好,系统运行稳定可靠,具有很好的移植性和抗干扰性,能够满足高档毛巾织机送经卷取和起毛控制要求,具有广阔的市场前景.
[1] 刘永亭.用PLC实现毛巾织机天经系统控制[J].电气时代,2008(4):21.
[2] 洪海沧.近期国产无梭织机的技术进步与展望[J].棉纺织技术,2014(2):2631.
[3] BAVRLE Y S. Interactive and experiential design in Smart textile products and applications[J].Pers Liquit Comput, 2004, 8(3):274281.
[4] 李广.基于Windows CE的毛巾织机电子送经和卷取控制系统[D].杭州:浙江理工大学机械与自动控制学院,2009:1112.
[5] 孙书鹰,陈志佳,寇超.新一代嵌入式微处理器STM32F103开发与应用[J].微计算机应用,2010,31(12):5963.
[6] 陈革,孙志宏,林申.织机电子送经和卷取控制系统的研制[J].东华大学学报(自然科学版),2003,29(3):5154.
[7] 宫辉,龚光华,黄土琛.从μC/OS-II到μC/OS-Ⅲ的各种改进[J].单片机与嵌入式系统应用,2012(10):7981.
[8] 刘争林.基于μC/OS-Ⅲ的材料特性测试温控系统[D].长沙:中南大学信息科学与工程学院,2012:5256.
Design of Embedded Controller Integrated Let-Off,Take-Up and Fuzzing of the Towel Loom
WANGZhen-zhong,ZHOUQi-hong,SHENQiong
(Engineering Research Center of Advanced Textile Machinery,Ministry of Education,Donghua University, Shanghai 201620, China)
A controller based on ARM (advanced RISC machines)integrated let-off, take-up and fuzzing was designed. Embedded real-time operating system μC/OS-Ⅲ was taken.On the μC/OS-Ⅲ platform,CAN bus based on CAN open slave protocol was applied in real-time communicating with the main control system. A tuning algorithm of PID(proportion integration differentiation) parameters based on RBF(radial basis function) neural network about tension control was developed, meanwhile the real-time synchronization control of four servo motors of upper warp beam, under warp beam, take-up roller and fuzzing cam was finished. The debugging operation results show the integrated controller can solve the issues such as uneven control of weft density and tension existed in the domestic towel loom, and meet the requirements of development of the towel loom such as high-speed, digitization and intelligence.
towel loom; ARM(advanced RISC machines); let-off and take-up; fuzzing control; μC/OS-Ⅲ
16710444 (2016)060869-06
20150930
上海市自然科学基金资助项目(16ZR1401800)
王振中(1989—),男,江西抚州人,硕士研究生,研究方向为纺织机械机电一体化控制. E-mail: 804688170@qq.com 周其洪(联系人),男,副教授,E-mail: zhouqihong@dhu.edu.cn
TS 103.7
A
