复杂背景下基于颜色的车牌定位方法研究
2017-01-12陈海霞崔茜
陈海霞++崔茜
摘 要: 车牌的颜色特征是车牌定位的一个关键信息。复杂背景下,直接对车牌边缘进行分割以达到车牌的定位比较困难。为解决上述问题,提出了一种复杂背景下基于颜色的车牌定位方法。此方法通过颜色空间变换,将复杂背景下与车牌颜色相近的颜色全部保留,滤除其他不符颜色。实验结果表明,基于颜色的车牌定位方法,去除了背景颜色及不相干区域的干扰,可以简化后续车牌处理算法,提高车牌定位的精度和速度。
关键词: 车牌颜色; 复杂背景; 色彩空间变换; 车牌定位
中图分类号: TN911.73?34; TP391.1 文献标识码: A 文章编号: 1004?373X(2016)23?0052?03
Research on color?based vehicle license plate location method under complex background
CHEN Haixia1, CUI Qian2
(1. Tonghua Normal University, Tonghua 134002, China; 2. Patent Examination Cooperation Tianjin Center of the Patent Office, SIPO, Tianjin 300304, China)
Abstract: The color feature of vehicle license plate is the key information of vehicle license plate location. Under complex background, it is difficult to locate the license plate by separating the license plate edge directly. In order to solve the above problem, a color?based vehicle license plate location method under complex background is proposed. The color space transformation is used to reserve the color similar to the vehicle license plate color under complex background, and filter out other unmatched colors. The experimental results show that the color?based vehicle license plate location method can eliminate the background color and interference in incoherent area, simplify the subsequent vehicle license plate processing algorithm, and improve the vehicle license plate positioning accuracy and speed.
Keywords: vehicle license plate color; complex background; color space transformation; vehicle license plate location
0 引 言
车辆牌照的精准定位是车牌识别的关键。目前对于车牌的定位方法多种多样,较常见的方法包括车牌边缘检测[1?5]、纹理特征提取[6?7]、基于灰度跳变的定位方法[8]等。基于边缘检测的方法仅仅靠提取当前图片的边缘,查找矩形区域定位车牌[1?3,5],提取特征单一。复杂背景下,存在多种形状区域,与车牌形状相似区域会干扰车牌边缘提取,使提取效果不佳,从而产生错误。基于纹理特征的车牌定位方式[7],对于车牌纹理不清晰的图片来说,无法达到定位效果,而且这种定位方式对光照等外界因素要求较高。而基于灰度跳变的定位方法,当背景相对复杂时灰度值跳变不明显,定位效果也会受到影响[9]。
基于颜色空间的车牌定位是近几年研究比较多的定位方法。以往研究的定位方法都是对灰度或二值图像[9]的处理。先将原始图片转换到不同空间,例如HSV[8,10],CIE[11],YUV[12]等空间,或直接在RGB空间根据转换后颜色差异呈现的灰度差异,设定不同颜色所对应灰度的阈值[8,10],对灰度图片进行相应的处理。这种算法计算过程复杂,划分的灰度级不明显,而且灰度图片不如彩色图片直观清晰。
复杂图像中存在不同颜色和形状的物体,这些都会干扰其中车牌区域的定位。为了更好地在复杂背景中定位出车牌信息,本文提出一种通过直接拾取车牌内部的彩色信息,将与车牌颜色相同的区域全部保留,从而完成车牌区域初步定位的方法。提取出来的部分可以经过后续的边缘检测等其他方法提取车牌边框,或者分割车牌内部字符,准确识别车牌内部字符信息。这种车牌定位的方法减少了仅用边缘提取车牌时,提取的其他相近图形区域的干扰。
1 车牌定位过程
本文提出的基于颜色的车牌定位方法,首先采用统计法确定车牌特征颜色的阈值范围,再将整幅图片做HSV空间变换,保存提取出来的颜色区域,去除其他不相干颜色区域,然后再通过边缘检测方法进行定位。其方法流程如图1所示。
2 HSV色彩空间
对于彩色图片的处理,首先要选择适当的颜色空间。最常见的颜色空间有RGB空间、CMY空间、HSV空间、YUV空间等。RGB和CMY分别是加法原色和减法原色模型,以原色组合的方式定义颜色。这两种颜色空间中各自的三个分量相互影响,一个分量变化即影响整个颜色,从而导致人眼对颜色的识别改变[13]。因此需要找到一种更好的颜色空间,使其内部的分量各自分离,并且对于每一个分量来说,相同的处理改变量在不同的取值处引起相同的视觉变化。
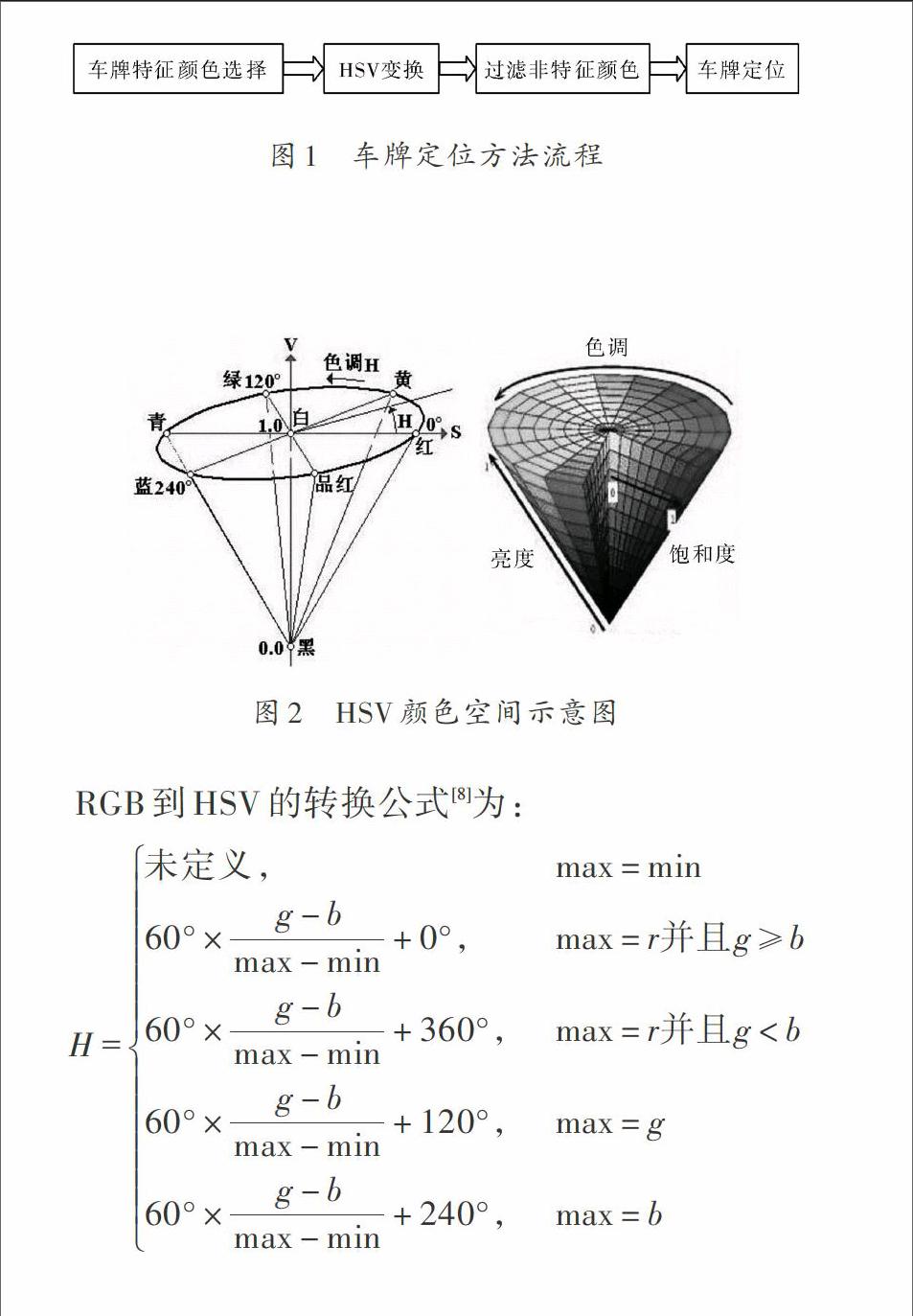
本文采用HSV颜色空间,对颜色进行识别。HSV颜色空间有三个分量,分别是H(色调)、S(饱和度)、V(亮度)。色调H:用角度度量,取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°。它们的补色是:黄色为60°,青色为180°,品红为300°;饱和度S:是指色彩的纯度,越高则色彩越纯,低则逐渐变灰,取值范围为0.0~1.0;亮度V:取值范围为0.0(黑色)~1.0(白色)。HSV色彩空间示意图如图2所示。
RGB到HSV的转换公式[8]为:
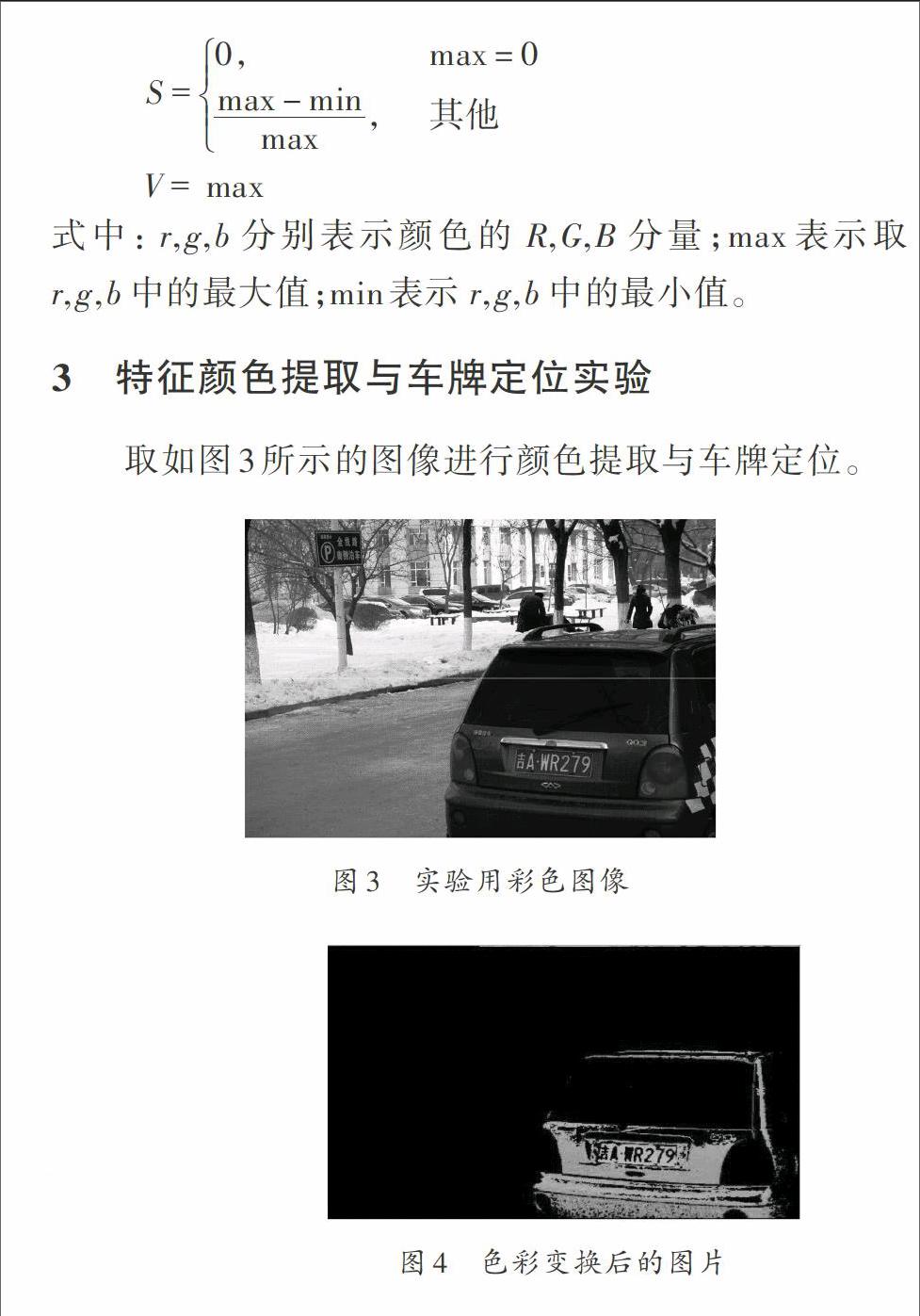
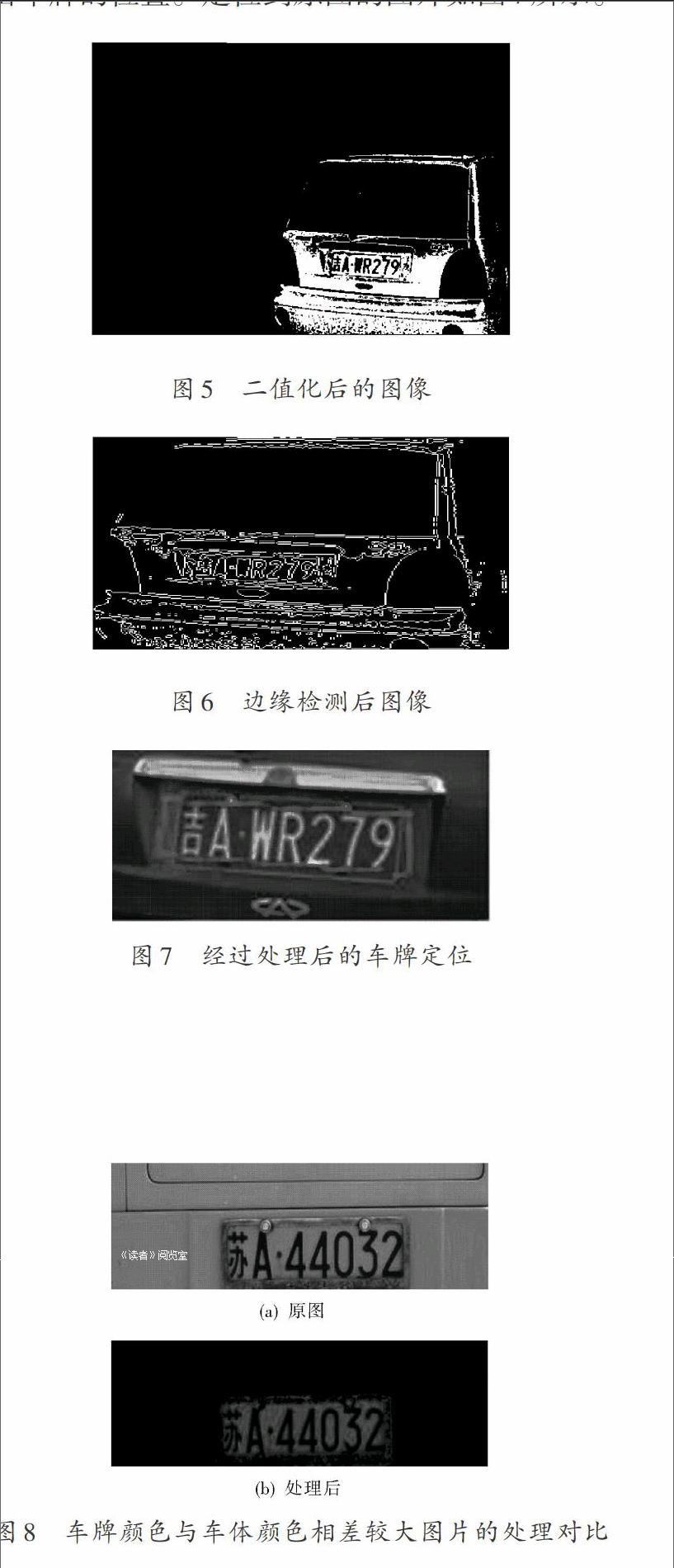
[H=未定义,max=min60°×g-bmax-min+0°,max=r并且g≥b60°×g-bmax-min+360°,max=r并且g 式中:[r,g,b]分别表示颜色的[R,G,B]分量;max表示取[r,g,b]中的最大值;min表示[r,g,b]中的最小值。 3 特征颜色提取与车牌定位实验 取如图3所示的图像进行颜色提取与车牌定位。 图片中背景颜色复杂,形状、颜色较多,若直接采用边缘检测的方法会产生许多边缘干扰,影响车牌定位。同时出现的两个矩形区域(车牌和路标)也会影响基于形状的车牌定位方法。图3中车牌和路标的颜色虽然都为蓝色,但是蓝色差别还是比较明显,采用基于颜色车牌定位方法,可以将与车牌颜色相差较大的蓝色部分滤掉,保留车牌区域颜色信息。 本文采用统计方法确定保留区域的颜色阈值。通过对同一环境下50幅不同新旧程度的蓝底白字车牌图片进行车牌底色拾取,发现蓝色[H]值分布在221~240之间,平均值为227.75,90%蓝色的[H]值与平均值的差值在6以内,呈高斯分布。因此,取特征颜色的[H]值以227.75作为阈值。 图4是对整幅图片做HSV变换后,保留阈值范围内的像素点,而将其余像素点均变换为黑色,即[H=0,][S=0,][V=0]的结果。由图4可见,与车牌颜色区域相同的部分被突显出来,而其余部分被滤除。 对变换后的图片进行二值化处理[14],将像素点不为黑色的区域([H,S,V]的值不全是0)处理成白色,其他区域为黑色,二值化后的图片如图5所示。以从上至下的顺序扫描像素得到的第一个不为0的行坐标和从左至右第一个不为0的列坐标为一个点的坐标;以从下至上扫描像素得到的第一个不为0的行坐标和从右至左第一个不为0的列坐标为另一个点的坐标,以这两个点为对角线做矩形,该矩形区域即为包含车牌的有效区域。后续处理只针对有效区域内的像素,因此,可以大量节省运算时间,提高定位速度。在有效区域中首先用Sobel算子进行边缘检测结果如图6所示。然后进行两次闭运算和两次开运算的数学形态学处理,使图像形成一个个大小不同的连通域。最后,通过判断各个连通域的长宽比,定位出车牌的位置。定位到原图的图片如图7所示。 当车牌颜色与车体颜色相差较大时,此种方法提取的车牌颜色将更加精准,并且实现步骤简单。图8为车牌颜色与车体颜色相差较大时的提取效果。 4 结 论 本文提出了一种复杂背景下基于颜色的车牌定位方法。首先,通过统计方法得到车牌区域颜色特征值。然后,对图像进行RGB空间到HSV空间的转换,保留特征颜色范围内部分,将非车牌颜色区域滤除,获取有效区域。最后,在有效区域中,通过边缘检测和形态学处理定位车牌。 通过上述方法进行车牌定位可以通过颜色特征快速消除复杂背景中的无效区域,去除影响车牌定位的大量干扰因素,从而简化后续处理算法并提高车牌定位的速度和准确度。 参考文献 [1] 王钰淞.基于灰度边缘和车辆颜色对的车牌定位[J].信息与电脑(理论版),2012(1):42?43. [2] 刘小飞.基于边缘检测和形态学的车牌定位[J].硅谷,2012(12):24. [3] 卓炜,齐春.基于边缘信息的车牌定位[J].中国科技论文在线,2011,6(4):305?309. [4] LALIMI M A, GHOFRANI S, MCLERNON D. A vehicle license plate detection method using region and edge based methods [J]. Computers and electrical engineering, 2013, 39(3): 834?845. [5] ZHENG Danian, ZHAO Yannan, WANG Jiaxin. An efficient method of license plate location [J]. Pattern recognition letters, 2005, 26(15): 2433?2437. [6] 王晓健.车牌定位与字符分割算法[D].北京:北京邮电大学,2009:40?51. [7] 杨海廷.基于纹理特征的车牌识别系统的研究与实现[D].成都:电子科技大学,2005:22?31. [8] 刘瑞林,杨晨晖.HSV色彩空间中的多阈值车牌定位分割方法[J].福建电脑,2008(1):14. [9] 沈勇武,张专.基于特征颜色边缘检测的车牌定位方法[J].仪器仪表学报,2008,29(12):2673?2674. [10] 王枚,王国宏,潘国华.基于HSV空间的车牌定位方法[J].烟台大学学报(自然科学与工程版),2007,20(1):49?50. [11] 郑成勇.一种CIElab颜色空间中的车牌定位方法[J].五邑大学学报(自然科学版),2010,24(1):22?24. [12] 程增会,戴祥,唐大鹏,等.一种基于HSI和YUV颜色模型的车牌定位方法[J].计算机应用与软件,2011,28(12):132?134. [13] 王夏黎,周明全,耿国华.一种基于HSV颜色空间的车辆牌照提取方法[J].计算机工程,2004,30(17):133?135. [14] 李蕴齐.基于小波变换的图像阈值去噪及其效果评估[J].东北师大学报(自然科学版),2012,44(1):60?66.
