单波束测深波束角效应的自动改正方法
2017-01-12崔晓东李富强阳凡林
崔晓东,简 波,李富强,杨 红,阳凡林,曲 萌
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590;2.长江航道测量中心,湖北 武汉 430010;3.国家测绘地理信息局 第七地形测量队,海南 海口 570203;4.长江三峡勘测研究院有限公司(武汉),湖北 武汉 430074)
单波束测深波束角效应的自动改正方法
崔晓东1,2,简 波2,李富强3,杨 红4,阳凡林1,曲 萌1
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590;2.长江航道测量中心,湖北 武汉 430010;3.国家测绘地理信息局 第七地形测量队,海南 海口 570203;4.长江三峡勘测研究院有限公司(武汉),湖北 武汉 430074)
单波束回声测深系统在水深测量领域中应用广泛。仪器测深时,由于换能器发射波束存在一定开角,导致测深信号出现波束角效应,使测深值具有一定误差,引起海底地形失真。为了解决这一问题,本文提出一种针对海底地形变化过程中过渡段与非过渡段的波束角效应自动改正方法,实现对失真地形的改正。实验表明,该方法能够明显改正受波束角效应影响的海底特殊地形,自动对实测地形特征进行判断并将改正后地形进行有效衔接,在某些地形变化明显的海底,测深误差的减小值可达62%~77%,对于提高特殊地形的测深数据精度和可靠性,具有一定应用价值。
单波束;波束角效应;线性地形;回声测深;自动改正
随着水下地形测量的快速发展,水下地形信息精细化表达越来越得到生产单位的关注。以回声测深技术为原理的单波束测深系统凭借其灵活机动、操作简单、成本低廉的优势,在我国近海、河流湖泊等水域的应用十分广泛。由于测深仪换能器自身发射波束存在一定开角,在测深过程中,换能器只记录最早接收到的声信号作为计算水深的依据,因此测深仪记录的水深值可能是水底波束覆盖区域中任意一点至换能器的最短距离[1],这就是波束角效应。该效应普遍存在于水下地形测量中,尤其在地形变化较大的海底区域,带来的测量误差尤为显著,目前国际上一些国家的海道测量规范已将此项误差列为测深数据处理步骤之一。
彭光宇等[2-3]通过对波束角产生原因进行分析,系统论述了宽波束回声测深仪在测量水深方面的波束角改正问题,提出经验公式及应用。刘雁春[4]通过分析海底地形特征将海底划分为三部分(线性过渡段、凹点以及凸点),进而推导出与之对应的三个具体失真现象(线性过渡段的平移过程、凹点的深度丢失过程以及凸点的双曲线增伪过程),同时对该特殊海底的失真规律提出改正公式。目前国内外对波束角效应的最新研究虽针对不同特殊地形提出了改正方法[5-11],但对于水下地形突变的过渡区域没有提出明确的解释,缺乏普遍的适用性。单波束系统在测量过程中所受到的潮汐、波浪效应等影响可通过潮位改正和姿态改正等方式加以改正[12-13],但波束角效应对地形产生的失真影响,有效的改正模型不多,生产过程中通常被忽略。
本文在分析线性海底的基础上,提出一种针对复杂海底地形的自动改正方法,对水下地形进行细化分析处理,根据地形中出现的极值点,对地形进行过渡段与非过渡段的划分,求解过渡段与非过渡段的波束角影响范围,实现对受波束角效应影响的失真地形的改正。经测试,该方法能够改善波束角效应所产生的影响,提高测量精度。
1 波束角效应分析及改正

图1 波束角效应改正坐标系Fig.1 Coordinate system of beam width effect correction

图2 线性地形非过渡段的失真分析图Fig.2 Distortion analysis of non-transition stage in linear terrain
本文针对单波束的工作性质,对波束角效应进行空间分析,模拟水下地形,建立如图1所示的坐标系。图中,原点O为测线的起始位置,轴正方向为测量船沿测线前进方向,y轴垂直于x轴向下。为便于单独研究波束角效应的影响,本文排除了实际测量中波浪效应和船体的实时姿态变化对测深的影响,因此x轴所在平面即为实时海平面,y轴代表实时测量的水深。在此坐标系下,易于建立函数模型,在线性地形基础上,以线性地形的极值点为依据,将水下地形划分为过渡段与非过渡段,过渡段地形是指极值点附近(坡向发生变化)受波束角效应影响的地形范围;非过渡段地形是指除过渡段地形外,坡向没有发生变化的地形受波束角效应影响的范围。
1.1 线性地形非过渡段的失真分析
情况1arcsin(D′(x1))>θ

(1)
(2)
(3)
(4)

(5)
(6)
(7)
(8)
情况2arcsin(D′(x1))<θ

(9)
(10)
(11)
(12)
arcsin[D′(x2)]=α。
(13)
进而,
(14)
(15)

(16)
(17)
1.2 线性地形过渡段的失真分析
1.2.1 凸型海底
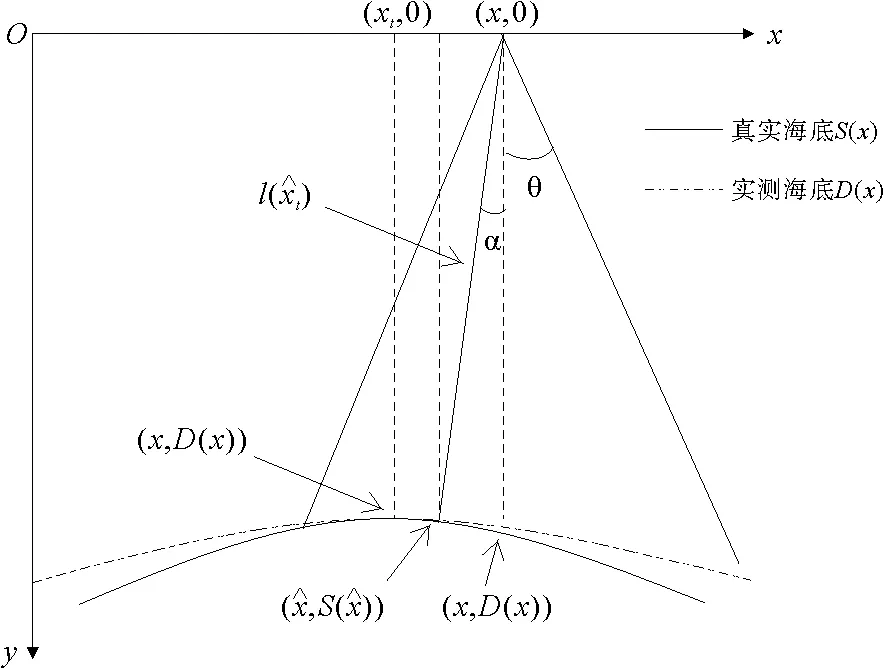
图3 凸型海底失真分析图
(18)
其中,W为凸点单侧受波束角效应影响产生的地形失真区间长度,单位m。
测船沿着测线前进位于凸点左侧时,arcsin(D′(x))<θ且D′(x)>0,根据式(16)和式(17),可得实际探测地形的位置为:
(19)

(20)
(21)

(22)

测船沿着测线继续前进到达凸点右侧区域时,arcsin(D′(x))<θ且D′(x)<0,根据式(14)和式(15),对于实际探测点位为
(23)
(24)
同理,当凸点左右两侧[xt-W,xt+W]范围内,若arcsin(D′(x))>θ,凸点两侧的实测水深D(x)所对应的实际探测点位为

(25)

(26)
1.2.2 凹型海底


图4 凹型海底失真分析图
(27)
(28)
进而,由于两侧地形产生的偏移效应,导致单波束测深仪无法接收到实际海底凹点附近地形的回波,在[xb-Δx1,xb+Δx2]区间内,实际海底地形无法通过测深仪实测数据求得,只能求解出实际海底地形丢失范围,即
(29)
其中,Δx1和Δx2分别为凹型海底在凹点两侧的地形丢失区间长度,单位m。
同理,当凹点两侧坡角arcsin(D′(x1))<θ,arcsin(D′(x2))>θ时,
(30)
Δx2=D(xb)sinθ。
(31)
综上,当测深仪记录水深出现凹型海底时,实际海底的丢失范围如表1所示。

表1 凹型海底丢失范围表
1.3 波束角效应的综合改正
单波束测深仪在测量过程中,带有波束角效应误差的原始数据是已知的,而真实的海底地形是未知的。波束角效应改正的基本原理为消除波束角效应所产生的误差,使测量水深值D(x)尽可能接近真值S(x)。同时,由于无法判断记录仪接收的实时回波数据的方向,瞬时位置所对应的实际海底探测点也无法求得,因此对波束角效应的改正需要对数据进行后处理。单波束水深数据存储方式基本是以测线为文件单位的离散水深数据,结合对测线文件中水深变化的过渡阶段和非过渡阶段的地形变化特征,波束角效应的改正过程主要分为以下六步:

② 对极大值点附近过渡段水深数据进行改正:首先根据式(18)确定每一极大值点所产生的水深失真范围[xt-W,xt+W],并在该范围内判断极大值点两侧区域[xt-W,xt],[xt,xt+W]的地形坡角与单波束的半波束角θ的关系,根据式(19)~(26),对不同情况进行改正。

④ 计算极小值点附近过渡段水深所对应的真实海底的丢失范围:根据表1,判断极小值点两侧的坡角大小,选择与之对应的真实海底丢失范围[xb-Δx1,xb+Δx2]。根据水深测量原则,可令真实海底的丢失部分为:
当极小值点两侧不产生深度丢失现象时,测船在该点上不受波束角效应的影响,该极小值即为对应的实际探测海底水深值。
⑤ 对测线非过渡段水深数据进行改正:沿测线前进方向,从测线起点至测线终点,不包含极大值点水深失真以及极小值点深度丢失范围的地形即为测线非过渡段地形,通过判断坡角大小对该地形进行改正,利用式(1)~(8)、式(14)~(17)求解。
⑥ 对整条测线改正后的水深进行拼接。
(34)
2 实验与分析
实测数据来自浙江千岛湖某区域水下地形测量试验。由于千岛湖水面较平静,不存在潮汐现象,因此涌浪等因素对单波束产生的姿态误差影响较小,同时试验时采用了姿态传感器,确保误差源主要集中在波束角效应上。为验证本文算法的有效性,以多波束在该区域的测量值为基准,对改正后的单波束数据进行对比分析。对于单波束而言,多波束的波束角小得多,实验采用的多波束的波束角大小为0.5°×1°,波束角效应相对来说也小得多。实验采用两组数据,每组数据包含5条测线,测线间隔为10 m,单波束数据采样间隔1 m,波束角大小7°,测点坐标统一采用WGS-84坐标系,投影方式为高斯6度带投影,中央经线为117°。本次试验采用的主要仪器分别为:HD-380双频单波束测深仪,天宝R4 GPS-RTK,R2Sonic2024多波束测深仪。

图5 测线①改正前后水深对比示意图
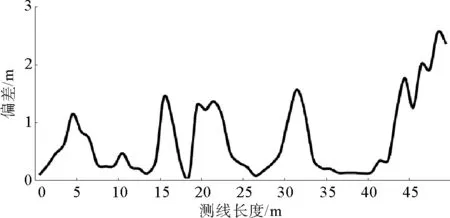
图6 测线①改正前后水深偏差曲线图
数据进行声速、水位等改正后,利用本文提出的改正方法,对两组实验数据(共10条测线)分别进行改正。以第一组实验数据中的①号测线为例,将测线①改正前与改正后的数据在同一坐标系下显示,如图5所示;改正前后水深偏差如图6所示。
由图5和图6可见:
1) 同一条测线相同位置处的水深,改正前后差值变化明显,说明单波束测量值与真实海底因波束角效应的影响而产生明显偏差,其差值最大可达2.56 m,根据海道测量规范中所规定的水深测量标准,水深在30~50 m范围内,水深测量极限误差(置信度95%)应为±0.5 m,改正后水深值在限差的允许范围内;
2) 测线长度在0~6 m以及42~50 m两个非过渡阶段地形区间,后者的地形坡角大于前者,改正前后42~50 m区间的地形偏差均值为1.85 m,0~6 m区间地形偏差均值为0.58 m,说明地形坡角越大,地形的偏移失真越明显;
3) 测线长度16~22 m凸型过渡段地形区间,改正后相较于改正前变化明显,其形状更为尖锐,与本文对凸型地形的分析相符合;
将两组数据分别进行等深线图绘制(图7、图9)以及地形建模(图8、图10),可更直观地显示对波束角效应改正前后的对比结果。其中,等深线图的坐标系为WGS-84平面直角坐标系。

图7 第一组数据改正前后等高线对比图

图8 第一组数据改正前后地形建模对比

图9 第二组数据改正前后等高线对比图
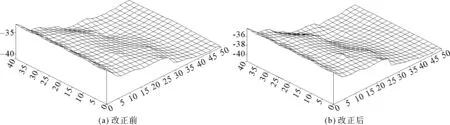
图10 第二组数据改正前后地形建模对比
利用多波束测深系统对上述两组单波束数据所在的相同测区进行测量,并将两组单波束数据改正前后结果分别与同区域多波束数据之间的偏差对比,如表2和表3所示[14]。
从表2和表3可见:
1) 改正前水深数据与多波束数据相差较大,10组数据平均偏差均值约为0.43 m,平均最大偏差可达0.65 m;而改正后结果与多波束实测值更为接近,10组数据平均偏差均值约0.13 m,减小0.30 m,平均最大偏差约0.21 m,减小0.44 m;两组数据改正后与对应的多波束水深数据偏差的均方根误差(RMSE)均满足规范要求,验证了本文提出的改正方法有效性;

表2 第一组数据改正前后测深值与多波束测深值对比
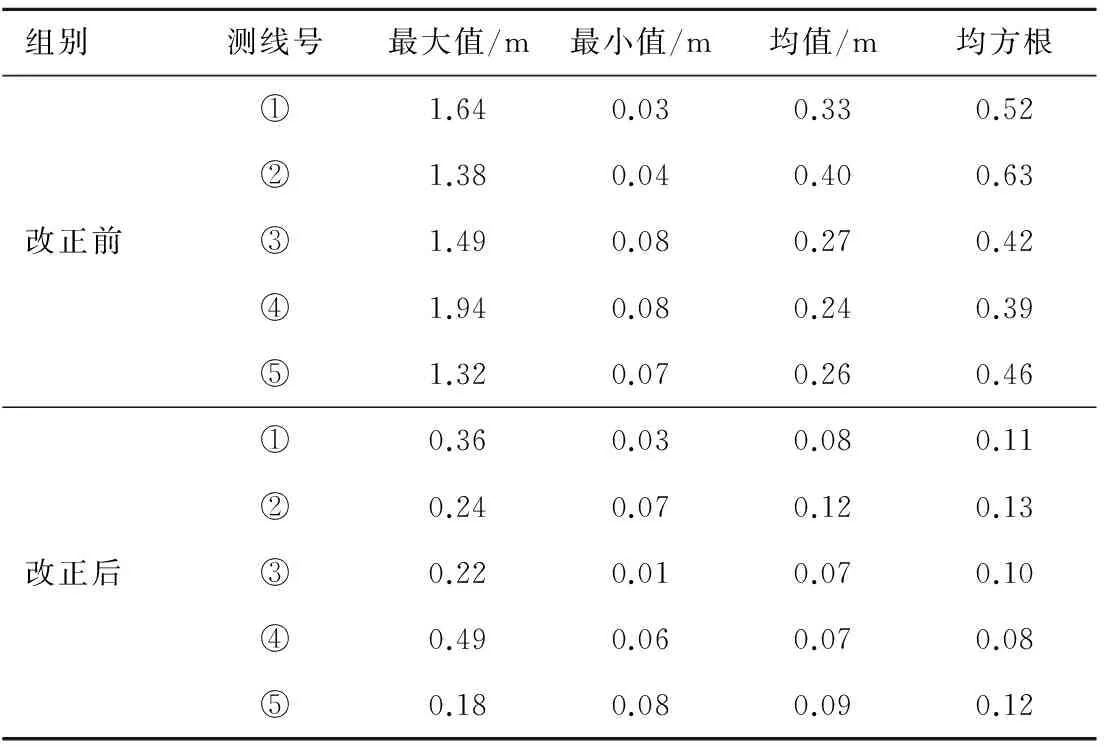
表3 第二组数据改正前后测深值与多波束测深值对比
2) 第一组数据改正前后同一位置所对应的水深值偏差较大,改正前5组数据平均偏差均值约0.55 m,改正后平均偏差均值约0.30 m;第二组数据改正前后同一位置所对应的水深值偏差较小,改正前5组数据平均偏差均值约0.17 m,改正后平均偏差均值约0.09 m。可见两组数据地形复杂程度不同,波束角效应所产生的地形偏差大小也不同(两组数据地形变化可参见图7~10)。说明水下地形越复杂,波束角效应的影响就越显著,进而带来的测深误差就越大。
3) 通过两组数据改正前后测深值比较,在地形起伏变化较大的特殊海底区域,改正后测深误差比改正前减小62%~77%。根据《海道测量规范》,水深在30~50 m区间内,极限误差±0.5 m[15],两组数据改正后水深值均满足《海道测量规范》的要求,对于特殊海底地形测深值精度的提高效果明显。
3 结束语
本文针对单波束测量中由波束角效应引起的地形失真现象,提出一种针对地形变化的自动改正方法。本方法能够根据实测水深数据自动对实测地形特征进行判断,同时对不同地形类型在测量区间内进行划分并改正,并将改正后地形区间进行有效衔接。
通过实测数据分析可得,在单波束测量过程中,地形的复杂程度和测深仪的波束角大小是突出波束角效应、影响地形失真程度的主要因素,地形变化越复杂,测深仪波束角越大,地形偏移与失真越显著。利用本文提出的方法对波束角效应改正后,精度满足我国海道测量规范要求,对削弱波束角效应引起的水深测量误差、提高单波束测深精度具有一定参考意义。
[1]CHEN Y Q,LIU Y C.Corrections for the seabed distortions caused by the angular beam width of echo sounders [J].The Hydrographic Journal,1997,84(4):15-19.
[2]彭光宇.宽波束回声测深仪测量水深的改正问题[J].海洋测绘,1985,3(1):11-15. PENG Guangyu.Correction of echo-sounding in wide beam echo-sounding instrument[J].Hydrographic Surveying and Charting,1985,3(1):11-15.
[3] 管铮.西北太平洋大于200米水深回声测深改正公式[J].测绘学报,1987,16(1):67-73. GUAN Zheng.Formulas for echo-sounding correction in the area of northwestern pacific ocean with depth more than 200 m[J].Acta Geodaetica et Cartographica Sinica,1987,16(1):67-73.
[4]刘雁春,陈永奇.海洋测深的波束角效应及其改正[J].海洋测绘,1999,4(2):20-27. LIU Yanchun,CHEN Yongqi.Beam width effect and its correction of echo-sounding[J].Hydrographic Surveying and Charting,1999,4(2):20-27.
[5]邹永刚,金绍华,朱小辰,等.数字测深仪的波束角效应仿真系统的设计与实现[J].测绘科学,2011,36(1):170-172,222. ZOU Yonggang,JIN Shaohua,ZHU Xiaochen,et al.Design and realization of beam angle effect simulation system based on mathematical sounder[J].Science of Surveying and Mapping,2011,36(1):170-172,222.
[6]肖付民,刘经南,刘雁春,等.海洋测深波束角效应改正的海底倾斜角求解差分算法[J].武汉大学学报(信息科学版),2007,32(3):238-241. XIAO Fumin,LIU Jingnan,LIU Yanchun,et al.Differential method for calculation seabed slope angle of beam-width effect correction in bathymetric survey[J].Geomatics and Information Science of Wuhan University,2007,32(3):238-241.
[7]邹永刚,刘雁春,夏伟,等.海洋测深中凸形海底测量数据失真与改正[J].测绘科学技术学报,2009,26(6):418-421. ZOU Yonggang,LIU Yanchun,XIA Wei,et al.Gibbous seafloor survey data distortion and correction in bathymetric[J].Journal of Geomatics Science and Technology,2009,26(6):418-421.
[8]邹永刚,刘雁春,肖付民,等.海洋测深波束角效应改正的方向问题研究[J].武汉大学学报(信息科学版),2009,34(5):593-596. ZOU Yonggang,LIU Yanchun,XIAO Fumin,et al.Correction for the directivity of beam width in bathymetry[J].Geomatics and Information Science of Wuhan University,2009,34(5):593-596.
[9]裴文斌,牛桂芝,曹满.波束角效应对航道测宽的影响[J].海洋测绘,2004,24(3):35-37. PEI Wenbin,NIU Guizhi,CAO Man.The effect of beam angle upon the hydrographic survey of strip width[J].Hydrographic Surveying and Charting,2004,24(3):35-37.
[10]徐晓晗,刘雁春,肖付民,等.海底地形测量波束角效应改进模型[J].海洋测绘,2005,25(1):10-12. XU Xiaohan,LIU Yanchun,XIAO Fumin,et al.The developed model of the seabed distortion caused by the angular beam width of echo sounder in bathymetric survey[J].Hydrographic Surveying and Charting,2005,25(1):10-12.
[11]徐晓晗.海底地形测量波束角效应的建模与仿真[J].计算机仿真,2009,26(8):349-353. XU Xiaohan.Modeling and simulation of seabed distortion caused by angular beam width of echo sounder in bathymetric survey[J].Computer Simulation,2009,26(8):349-353.
[12]刘雁春.海洋测深空间结构及其数据处理[M].北京:测绘出版社,2003.
[13]王智明,阳凡林,张会娟.基于消声水池的单波束测深仪精度评定方法[J].山东科技大学学报(自然科学版),2011,30(6):55-59. WANG Zhiming,YANG Fanlin,ZHANG Huijuan.Precision evaluation method of single beam echosounder based on anechoic pool[J].Journal of Shandong University of Science and Technology (Natural Science),2011,30(6):55-59.
[14]卜宪海,王明伟,阳凡林,等.多波束测深波束归位近似转换模型研究[J].山东科技大学学报(自然科学版),2016,35(5):15-20. BU Xianhai,WANG Mingwei,YANG Fanlin,et al.Research on approximate conversion model of beam homing in multibeam echosounding[J].Journal of Shandong University of Science and Technology (Natural Science),2016,35(5):28-34.
[15]中华人民共和国国家标准.GB 12327—1998,海道测量规范[S].
(责任编辑:高丽华)
Automatic Correction of Beam Width Effect for Single-beam Bathymetry
CUI Xiaodong1,2, JIAN Bo2, LI Fuqiang3, YANG Hong4, YANG Fanlin1, QU Meng1
(1.College of Geomatics, Shandong University of Science and Technology, Qingdao, Shandong 266590, China; 2.Changjiang Waterway Survey Center, Wuhan, Hubei 430010, China; 3.The 7th Institute of Topographic Surveying, National Administration of Surveying, Mapping and Geoinformation, Haikou, Hainan 570203, China; 4.Three Gorges Geotechnical Consultants Co. Ltd, Wuhan, Hubei 430074, China)
Single-beam echo sounding system is widely used in bathymetric surveying. The single-beam open angle of the transducer in bathymetric surveying leads to the beam width effect in sounding signals, causing certain errors in sounding value and distortion of seabed terrain. In order to solve the problem, this paper presented an automatic correction method of the beam width effect based on the transition stage and non-transition stage in the process of seabed terrain changes, which could eventually realize the correction of the distorted terrain. The results show that the proposed method can significantly correct the special terrain influenced by the beam width effect, automatically judge the characteristic of seabed terrain, and effectively connect the corrected terrain. In some complex seabed terrain, the sounding errors can be reduced by 62%~77%. Therefore, this method has certain application value for improving the accuracy and reliability of sounding data in special terrain.
single beam; beam width effect; linear terrain; echo sounding; automatic correction
2016-09-22
国家自然科学基金项目(41376108);测绘公益性行业科研专项经费资助项目(201512034);长江航道局重点科技项目(201630014)
崔晓东(1992—),男,山东青岛人,硕士研究生,主要从事海洋测量方面研究. E-mail:xiaodong6777@126.com 阳凡林(1974—),男,湖北荆州人,教授,博士生导师,主要从事海洋测绘及GNSS应用等方面的研究,本文通信作者.E-mail:yang723@163.com
P229
A
1672-3767(2017)01-0029-09
