一种检测闭环控制器及其全温稳定性验证
2017-01-12曹慧亮石云波
王 华,曹慧亮,石云波
(中北大学电子测试技术重点实验室,太原030051)
一种检测闭环控制器及其全温稳定性验证
王 华,曹慧亮*,石云波
(中北大学电子测试技术重点实验室,太原030051)
提出一种基于比例—积分和相位超前校正的闭环控制器设计,并验证电路在全温状态下的稳定性。分析闭环控制器的工作原理和电路的设计方案,并对闭环控制器的电路进行了仿真,得到了比较理想的结果。证明了在驱动回路和检测回路较小频率差的前提下,可通过控制系统的优化达到拓展带宽的目的。在不同温度状态下检测电路的性能,实验结果显示温度不会影响控制器的稳定性,但会影响控制器的带宽。
闭环控制器;相位超前校正;全温特性
硅微机械陀螺仪用于测量输入角速率信息,最早出现于上世纪八九十年代,其基于哥氏效应原理采用MEMS加工工艺制成,拥有体积小、成本低、重量轻、可靠性高、可批量生产等优点在惯性导航、汽车安全、机器人、消费电子等领域有着广泛的应用[1-2]。近些年来,随着各国对其研究力度不断加大,出现了许多高精度的测控方法,致使微机械陀螺仪的精度逐步提高,目前国外报道的陀螺精度(零偏稳定性)已经达到了0.1°/h(Allan方差)以内,其精度还有望进一步提高。国内对硅微机械陀螺仪的研究比国外起步较晚,经过近20年的发展取得了较大进步,部分研究院所已经研制了中、高精度的样机和产品,但由于加工工艺和集成电路等技术的限制,国产硅微机械陀螺仪性能与国外还有一定差距。
对于硅微机械陀螺仪,在其驱动回路稳定工作的前提下,角速度信息可由检测回路得到。检测回路通常分为开环工作模式和闭环工作模式,其中,开环状态下检测位移幅度与输入角速率成比例,陀螺输出的为检测模态位移信号;闭环回路是在开环回路的基础上增加了检测力反馈控制系统,系统输出的为反馈控制力信号,其检测位移几乎为零,所以闭环回路具有更好的动态特性。此外,检测开环回路的带宽特性由驱动和检测工作频率差决定,较小的频率差有助于提高陀螺的机械灵敏度和静态特性,但会严重限制带宽;较大的频差可提供较宽的带宽,但会降低机械灵敏度和输出信噪比。而检测闭环回路有效解决了陀螺仪灵敏度和带宽相矛盾的问题[3-6]。
此外,影响电路检测精度的因素有很多,温度是其中的一个重要因素,主要体现在谐振频率、品质因数、标度因数和零位输出(零偏)[7-8]。通过在不同的温度下进行实验,对比全温状态下的波特曲线来检测闭环控制器的稳定性。
1 比例-积分相位超前(PIPLC)控制器工作原理
在经典自动控制理论中,若一个零点和一个极点之间的距离远小于(小一个数量级以上)它们与原点的距离,则该零、极点可组成一个偶极子,偶极子中的零、极点对系统的作用互相抵消[9]。在相位因素不变的情况下,闭环带宽取决于闭环系统的主导极点(与远点最接近的极点)。所以,可以通过配置相应的系统零点与主导极点组成偶极子的方法拓展带宽[10-12]。
一般的偶极子补偿器,虽然可以很好地解决由模态频差引起的带宽内谐振峰,但需要对频差和检测模态品质因数精确匹配,致使其通用性差,无法满足大批量陀螺快速生产的需要。
本文通过微机械陀螺仪检测模态的实际传递函数进行深入分析和计算,充分利用偶极子的工作特点来设计偶极子补偿控制器的相关参数,进一步拓展陀螺带宽。通过设定偶极子补偿器的增益来调节陀螺标度因数,以满足大批量陀螺闭环控制器的通用性需要。
根据闭环回路稳定性原理,可知开环回路需有足够的幅值和相位裕度才可保证闭环的稳定,如图1所示(通常情况下相位裕度PM应在30°到60°之间,幅值裕度GM应大于6 dB)。当某一点的谐振峰由两个共轭极点会造成,其附近会有180°的相位变化(每个极点相位滞后90°),同时,陀螺检测模态较高的品质因数导致相位变化较为剧烈。所以,必须对相位和幅值进行校正和补偿,保证系统有足够的相位和幅值稳定裕度。
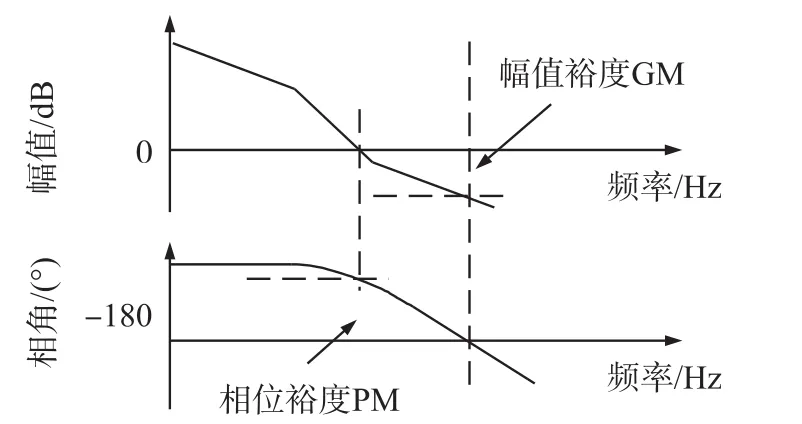
图1 稳定系统的裕度
2 PIPLC控制器设计
PIPLC控制器的设计目的是在保证系统有足够幅值和相角裕度的前提下提高系统的带宽。此外,系统的带宽和稳定性只与整体电路中的闭环回路控制器有关,该闭环回路可表示成单位负反馈系统,如图2所示,则该系统开环传递函数可表达为:

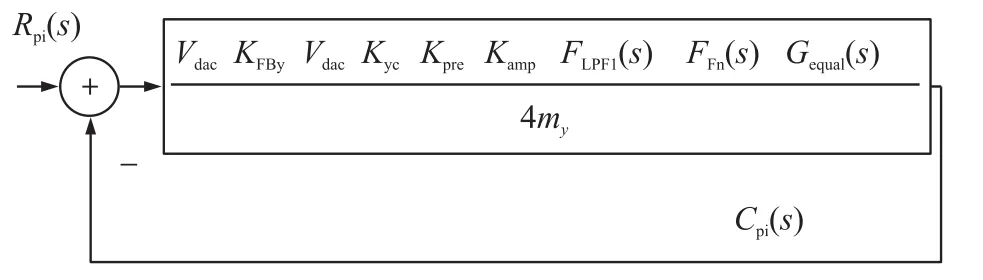
图2 闭环回路简化框图
Vdac=1.8 V为解调基准幅度,Kyc为检测模态位移-电容转换系数,KFBy为反馈静电力矩器,Kpre为检测接口电容电压转换系数,Kamp为一个放大环节,FLPF1为低通滤波器,FFn为反馈控制器,my检测模态等效质量,以上系数采用标号为GY-027的陀螺。通常情况下,期望系统开环特性低频段的增益应满足稳态误差的要求,中频段的斜率(剪切率,经过0 dB线)应为-20 dB/°,并且具有所需要的剪切频率ωcut的高频段应尽可能迅速衰减以减小高频噪声对系统的影响。同时,选用的串联相位超前校正装置可以增大系统的相角裕度,降低系统响应的超调量,也可增大系统带宽,加快系统的响应速度。根据上述分析,FFn在低频段采用一阶纯积分的形式以最大限度的减小稳态误差;在中频段,由于在频差Δω附近有180°的相位滞后,且变化剧烈,严重影响了相角裕度,所以在Δω之前必须采用两级一阶PD环节补偿相位,则经过Δω之后斜率即为-20 dB/°。在高频阶段,在二阶低通滤波器FLPF1影响下斜率变为-60 dB/°,已可以满足衰减高频噪声的需求,但为了匹配中频段的PD环节,应在高频段加入惯性环节,此时在高频段斜率为-80 dB/°,可以很好的衰减高频噪声。则:

根据上述分析,并通过仿真对上式参数的优化后取ωpi1=10 πrad/s,ωpi2=400 πrad/s,kpi=32(过大的kpi会破坏系统稳定)。根据前述参数设计控制器电路,如图3所示,为了简化电路和方便调试,控制器由两级运放构成,第一级可看作PI控制器,第二级为相位超前校正装置,则电路传递函数为:

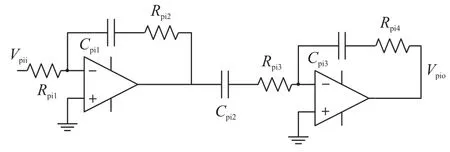
图3 PIPLC控制器电
根据表1中参数,在Multisim软件里进行仿真,并和其系统传函进行比较,如图4。图4中,电路仿真结果与系统仿真结果基本吻合。
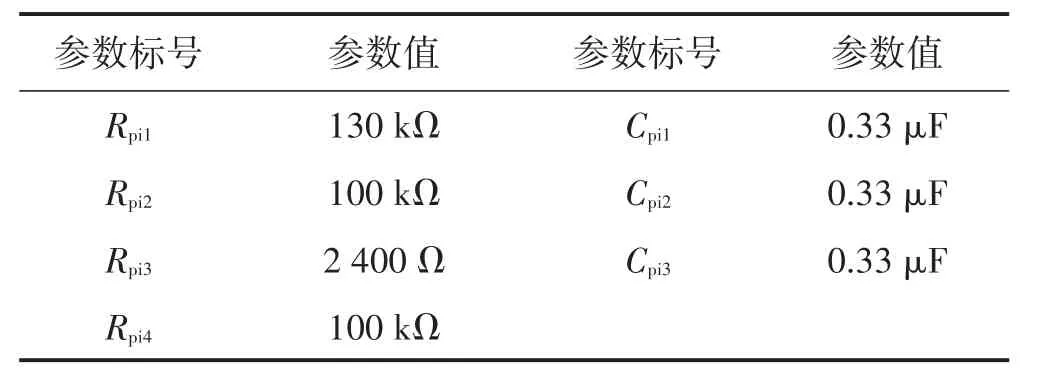
表1 PIPLC控制器中各阻容实际参数
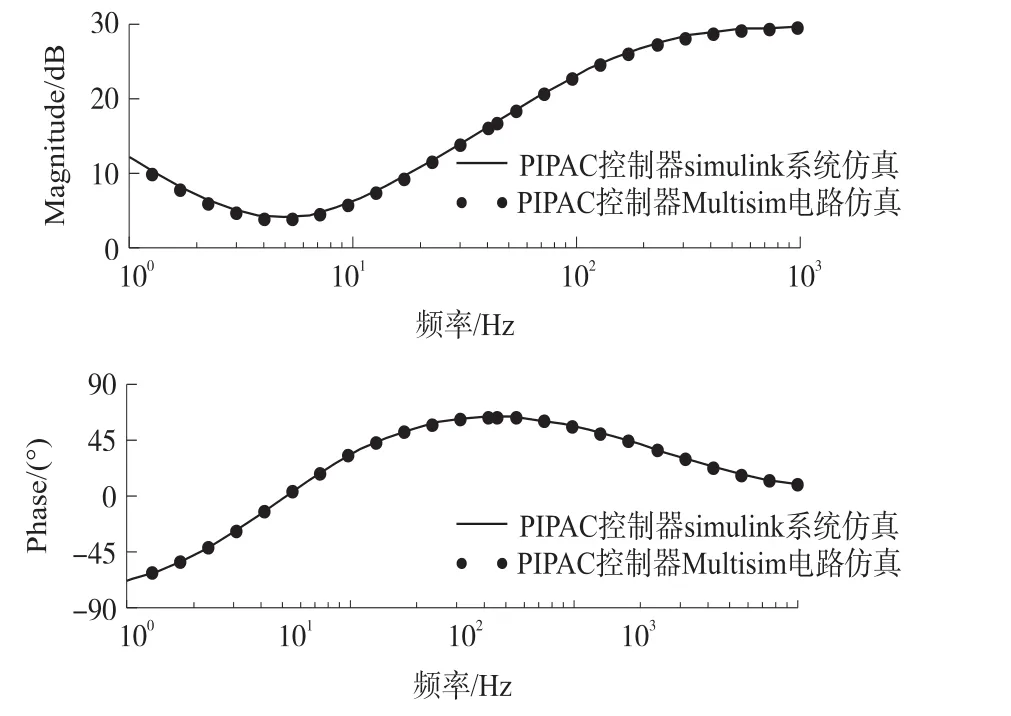
图4 PIPLC控制器电路仿真
3 温度对PIPLC的影响
温度是影响电路测量精度的重要因素之一,全温范围内陀螺谐振频率和品质因数会产生一定的漂移,但Δω变化小于1 Hz。在陀螺的检测电路系统中加入PIPLC控制器,系统在t=0 s上电工作,在3 s时输入Ωz=100°/s的阶跃信号,将各温度点的机械参数代入系统绘制检测闭环零极点图。如图5所示,放大图为部分零极点集中的区域,显示出不同温度下零极点分布差别不大。说明各温度点系统均处于稳定状态,温度变化不会影响PIPLC控制系统的稳定性。

图5 各温度点PIPLC系统闭环零极点图
图6为各温度条件下闭环系统波特图,可以看出不同温度下的波形曲线基本重合,说明不同温度条件下PIPLC的波特特性相差不大。用Multisim软件进行仿真运算,为得到各关键点数据如表2所示,从表中可看出,各温度条件下参数的变化基本不明显,可判断温度的变化基本不会影响PIPLC控制系统的带内平坦度及带宽特性。

图6 各温度点PIPLC系统闭环波特
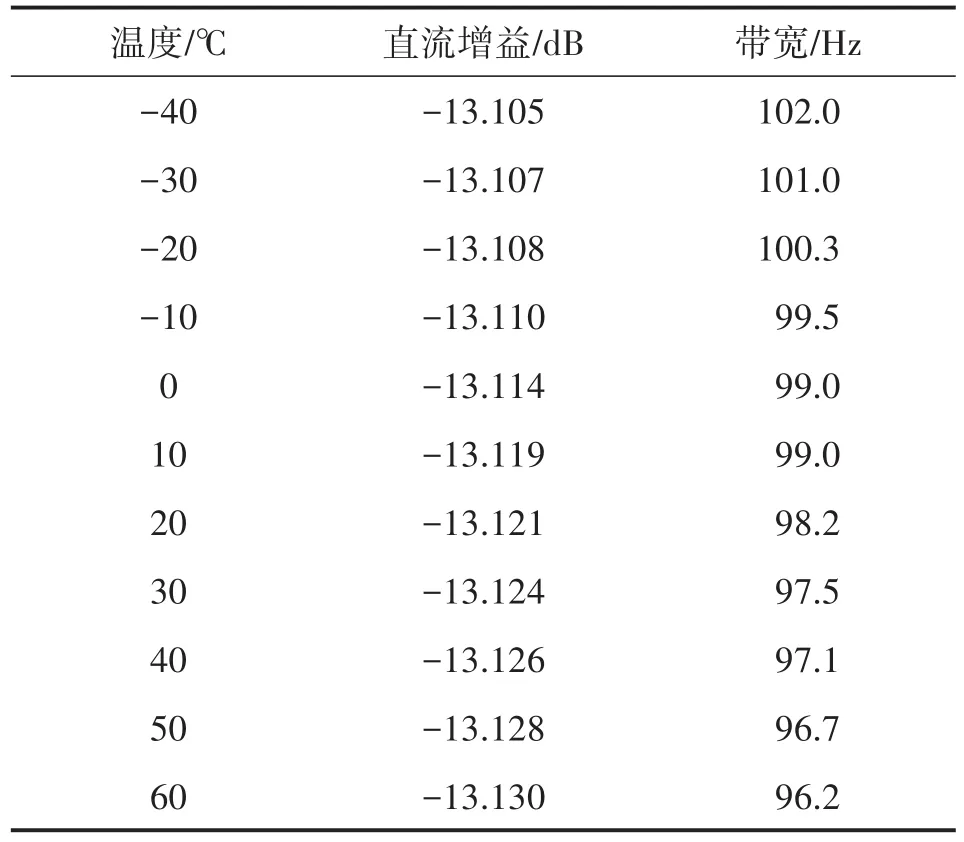
表2 采用PIPLC控制器后陀螺各温度条件下仿真波特图参数
4 PIPLC控制器闭环实验
根据上述分析和电路参数,在PCB板上搭建相关电路,对闭环系统进行了的阶跃响应测试,如图7所示。系统上电后工作在某固定状态,后在检测力反馈梳齿上以阶跃信号的方式输入电压模拟角速率Ωz=100°/s输入。
为了验证PIPLC控制器的全温特性,分别在-40℃和60℃温度条件下对闭环系统的带宽进行测试,测试结果图如图8所示,图8中实线和虚线分别为-40℃和60℃仿真曲线,“×”和“○”为实测曲线点,从图8可知-40℃和60℃系统带宽分别为107 Hz和96 Hz,与表2中仿真结果吻合(温度越高带宽越窄)。不同温度下的曲线基本重合,说明温度对于PIPLC控制器的影响不大。
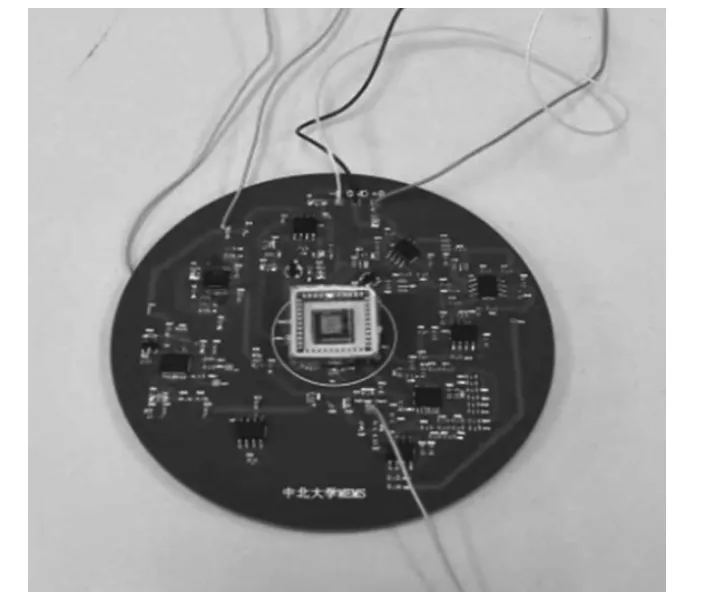
图7 陀螺仪实物照片
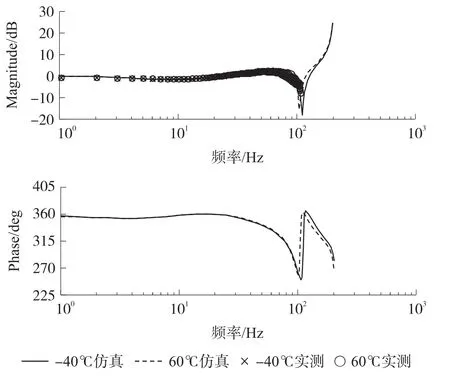
图8 -40℃和60℃温度条件下带宽仿真和测试曲线
5 结论
基于比例—积分和相位超前校正的检测闭环回路,有效解决了灵敏度和带宽相矛盾的问题。实验验证了控制电路在全温情况下都能保持较好的稳定性,受温度影响较小,通用性较强。
[1]Yang C,Li H.Digital Control System for the MEMS Tuning Fork Gyroscope Based on Synchronous Integral Demodulator[J].IEEE Sensor Journal,2015,15(10):5755-5764.
[2]曹慧亮,李宏生,申冲,等.双质量硅微机械陀螺仪带宽拓展系统设计[J].中国惯性技术学报,2016,2(42):218-223.
[3]Xia D,Hu Y,Kong L,et al.Design of a Digitalized Microgyroscope System Using Sigma Delta Modulation Technology[J].IEEE Sensor Journal,2015,15(7):3793-3806.
[4]许宜申,王寿荣,吉训生,等.微机械振动陀螺仪正交误差分析[J].仪器仪表学报,2006,27(6):105-107.
[5]曹慧亮,李宏生,申冲,等.基于偶极子补偿法的硅微机械陀螺仪带宽拓展[J].仪器仪表学报,2015,36(11):2427-2433.
[6]Lapadatu D,Blixhavn B,Holm R,et al.SAR500—A High-Precision High-Stability Butterfly Gyroscope with North Seeking Capability[C]//IEEE/ION Position Location and Navigation Symposium,2010,6-13.
[7]徐哲,刘云峰,董景新.基于闭环点位置控制的硅微梳齿式加速度计温漂抑制方法[J].中国惯性技术学报,2014,22(1):114-118.
[8]王晓雷,杨成,李宏生.硅微陀螺仪正交误差校正系统的分析与设计[J].中国惯性技术学报,2013(6):823-827.
[8]孙伟,初婧,丁伟,等.基于IMU旋转的MEMS器件误差调制技术研究[J].电子测量与仪器学报,2015,29(2):240-246.
[9]曹慧亮.硅微机械陀螺仪静电补偿与控制技术研究和实验[D].南京:东南大学,2014.
[11]王妍,张春熹.带第二反馈回路的全数字闭环光纤陀螺[J].压电与声光,2005,27(4):348-351.
[12]张勇,李绪友,王南,等.高精度数字闭环光纤陀螺的调制增益控制[J].哈尔滨工程大学学报,2008,29(11):1172-1175.
王 华(1990-),男,汉族,硕士研究生,河北保定人,研究方向为精密仪器工程,496541652@qq.com;

曹慧亮(1986-),男,汉族,美国佐治亚理工学院联合培养博士,中北大学副教授,河北石家庄人,目前主要从事MEMS陀螺仪等方面的研究,参加了总装预研、国家自然基金等多项科研项目,发表论文20余篇,caohuiliang1986@126.com;

石云波(1972-),男,汉族,博士,中北大学教授,山西运城人,目前主要从事MEMS、微惯性器件等方面的研究,y.b.shi@126.com。
A Closed-Loop Controller and Its Full Temperature Stability Verification*
WANG Hua,CAO Huiliang*,SHI Yunbo
(Science and Technology on Electronic Test&Measurement Laboratory,North University of China,Taiyuan030051,China)
A closed loop controller design based on proportional-integral and phase lead correction is proposed,and verify the stability of the circuit in the full temperature state.Analyze the working principle and circuit design of the closed loop controller,simulating the circuit of the closed-loop controller,having got the ideal result.In the condition that the driving circuit and the detection circuit are less frequently,we can achieve the purpose of expanding the bandwidth by controlling the optimization of system.Lastly,detect the performance of circuit at different temperatures.Experimental results show that the temperature does not affect the stability of the controller,but it will affect the bandwidth of the controller.
closed-loop controller;phase lead correction;full temperature characteristic
U666.1
A
1004-1699(2016)12-1827-05
��7230
10.3969/j.issn.1004-1699.2016.12.008
项目来源:中北大学电子测试技术重点实验室开放基金项目(ZDSYSJ2015004)
2016-04-07修改日期:2016-08-08
