微波技术与无人驾驶
2017-01-12德州学院宋致强张长坤
德州学院 宋致强 张长坤
微波技术与无人驾驶
德州学院 宋致强 张长坤
现有的无人驾驶汽车更多的是检测静止的障碍物或道路的坡度信息,对周围行驶中的汽车的检测力度不够,容易发生交通事故。本文主要介绍了采用微波传感器检测,可以检测到运动障碍物的运动速度、距离、方向、角度信息,也可以探测到静止障碍物,以便于更加清晰、有效地躲避不同状态的障碍物。
无人驾驶;微波传感器;障碍物
1 研制背景及意义
随着社会和经济的快速发展,无人驾驶汽车已不再新鲜。2015年德国奔驰汽车公司在联邦8号公路上测试了无人驾驶卡车。奔驰公司负责人表示,这种无人驾驶卡车有望在两年内投入市场,无人驾驶汽车不再是传说[1]。目前许多现代科技被运用于无人驾驶汽车,不止从视觉、听觉等识别技术应用在无人汽车系统研发中,有些汽车运用全球定位系统和激光传感器充当汽车的眼睛。通常,道路交通的实际情况往往比较复杂多变,无人驾驶的汽车还不能灵活应对,对人为驾驶也存在隐患。现有的无人驾驶汽车更多的是检测静止的障碍物或道路的坡度信息,对周围行驶中的汽车的检测力度不够,容易发生交通事故。微波传感技术的运用就可以为无人驾驶提供一个不同的思路,让无人驾驶更加有效,以提高安全系数。
2 微波传感无人驾驶装置的结构设计
微波传感技术已经在许多工业生产领域得到应用。在国内,微波技术已经用于玻璃纤维、化工产品、保温材料、木材等干燥,食品、医疗霉菌、干燥和焙烤,并在医疗、环保、农业等领域也有所应用[2]。该技术与无人驾驶有机的结合是一种不错的尝试。微波传感技术的运用使汽车行驶变得更加安全有效。
2.1 微波传感器的运用
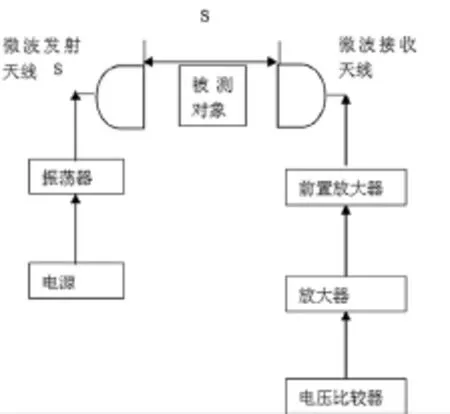
图1 微波检测距离原理图
微波传感器的原理是利用微波特性来检测一些物理量的器件。包括感应物体的存在、运动速度、距离、角度等信息。
其主要由微波振荡器和微波天线组成。微波振荡器是产生微波的装置。构成微波振荡器的器件有速调管、磁控管或某些固体元件。由发射天线发出的微波,遇到被测物体时将被吸收或反射,使功率发生变化。若利用接收天线接收通过被测物体或由被测物反射回来的微波,并将它转换成电信号,再由测量电路处理,就达到了微波检测物体的存在、运动速度、距离、角度的目的。
2.2 无人驾驶装置的设计
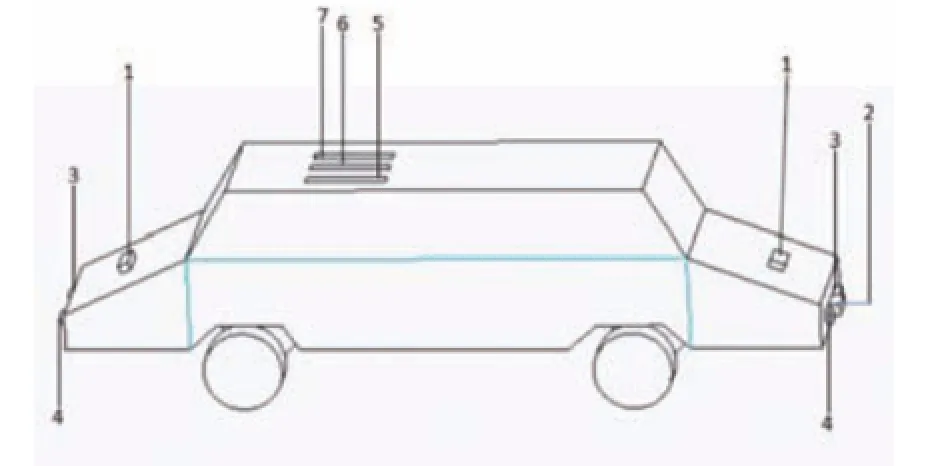
图2 无人驾驶汽车结构示意图
本设计更加智能化体现在对信息的搜集与处理上:如果遇到行人或可运动的障碍物时,若在安全许可距离内,首先发出鸣笛指令,鸣笛系统发出鸣笛,作为提醒;如果距离太近,则汽车同时向鸣笛系统、电子油门系统、制动系统、转向系统发出指令,鸣笛系统做鸣笛警告提醒的同时,电子油门系统减小油门,制动系统降低车速,转向系统进行转向操作。
3 无人驾驶汽车道路行驶的阶段
道路行驶是无人驾驶汽车最为重要的阶段:路况检测、信息的有效处理与安全指令的发出,哪个环节都可能会出现突发状况,必须做好各种情况的设计。
3.1 道路检测装置的设计
该检测装置主要包括微波传感器检测系统、卫星定位系统和声音检测系统。
上述的GPS卫星定位系统,用于实时定位汽车的位置,并给出从出发地到目的地的最优路径。GPS卫星定位系统位于车身的前方。上述的微波传感器系统用于发出监测信息,检测车辆周围的动态和静止汽车或障碍物的信息。微波传感器系统设置于车身的前后方各一个。上述的声音检测系统、数据接收系统分别接收其他车辆的鸣笛信息和微波传感器反馈的信息。声音检测系统,微波数据接收系统分别设置于车身的前后方各一个。各个检测系统分别对定理位置、超车情况、其它车辆的行驶信息进行搜集。
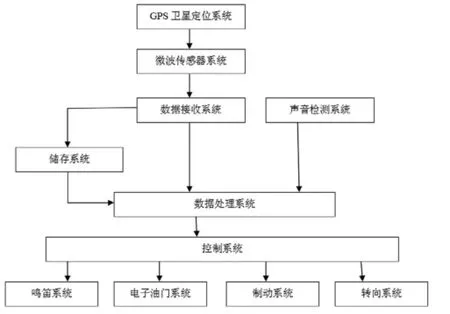
图3 障碍检测示意图
3.2 处理系统的设计
该系统主要包括数据接收系统、数据处理系统。数据处理系统是由相应的电脑处理器进行处理,该系统主要功能是把监测到的信息进行处理、判断、优化,经过分析对比做出相应的执行指令。
3.3 执行系统的设计
执行系统主要包括以下几个子系统:鸣笛系统、电子油门系统、制动系统、转向系统等。数据经数据处理系统处理后,执行系统接收到响应的执行指令,执行系统进行执行。
(1)电子油门系统:当汽车收到减速信号时电子油门系统由ECU(电控单元)—数据总线—伺服电动机—节气门执行单元。
(2)制动系统:当汽车收到减速信号时,鼓式制动器盘式制动器或工作—汽车减速。
(3)电动助力转向系统。
当汽车需要转向时—传感器ECU—旋转方向—助力电流大小—电动机—转向轴。
传感器把采集到的车速、转角信息输送给ECU,ECU决定电动机的旋转方向和助力电流大小,把指令传递给电动机,电动机将辅助动力施加到转向系统中,这样实时调整的转向助力便得以实现。
4 无人驾驶装置的工作过程
第一,检测阶段。无人驾驶汽车程序启动后,首先是由GPS卫星定位系统选择最佳的形式路径,以确保行驶路程相对短并且路况不是太复杂。在行驶的道路上,微波传感器系统向四周发出探测信号,检测车辆周围汽车的行驶速度、距离、方向,角度信息和静止障碍物的信息。由声音检测系统、数据接收系统接收检测到的路况信息,将信息反馈到数据处理系统。
第二,数据处理优化阶段。数据处理系统模块可以根据接收到的分析出周围汽车的行驶速度、距离、方向,角度信息,和其他车辆的欲超车信息等。把信息分析处理、判断、优化做出合理的指令。
第三,汽车执行阶段。根据处理器发出的指令,传导到各个子系统执行。如果有车辆想超车,汽车减速右行,如果有障碍车辆,发出鸣笛警告,进行合理安全的躲避等。
对于各种情况汽车必须做出有效安全的应答,如图4所示。
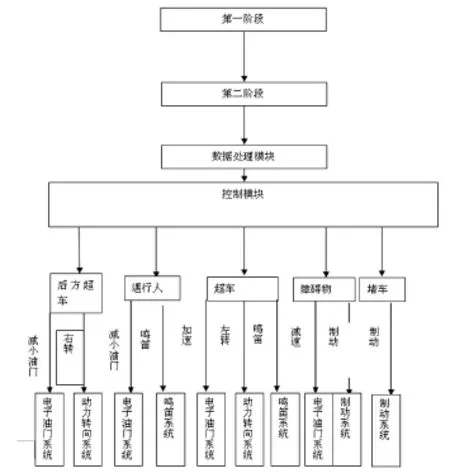
图4 无人驾驶装置的工作过程
5 结论
无人驾驶汽车是未来汽车发展的方向,人类在不久的将来会用上智能型无人驾驶汽车。那是一种将探测、识别、判断、决策、优化、优选、执行、反馈、纠控功能融为一体,会学习、会总结、会提高技能,集微电脑、微电机、绿色环保动力系统、新型结构材料等顶尖科技成果为一体的智慧型汽车[3]。控制无人驾驶的技术也在不断创新与融合,而微波传感技术可以检测到运动障碍物的运动速度、距离、方向,角度信息,也可以探测到静止障碍物,能够更加清晰、有效地躲避不同状态的障碍物。细化了无人驾驶中途的可操作性,对途中其他行驶中的车辆进行有效的检测、预测、避让等,提高了安全系数。对复杂的实际路况情况进行分析与应对,做出更合理安全的避让措施。并且微波传感技术已经相当成熟,还未运用在汽车领域,本文是结合微波传感技术可以检测运动障碍物的运动速度、距离、方向,角度信息的优势,为无人驾驶提供了一种新思路。该产品处于概念设计阶段,相信随着技术的成熟该设计必将很快实现。
[1]柴野.无人驾驶汽车不再是传说[N].光明日报,2015年10月06日.
[2]陈国盛.微波技术论文[D].湖北师范大学,2015年.
[3]乔维高,徐学进.无人驾驶汽车的发展现状及方向[N].上海汽车,2007年07月.
