油泥模型车点云数据后处理方法浅析
2017-01-10司圣志
司圣志
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
油泥模型车点云数据后处理方法浅析
司圣志
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
油泥模型是汽车造型设计必不可少一种手段,它是设计师实现从二维效果图到真实模型的方法,油泥模型扫描结果的好坏直接影响到后期B面和A面制作的效果。文章在逆向工程设计思想的指导下,就油泥模型外观的特性和技术要求,使用非接触式的扫描方法扫描油泥模型。由于实际扫描过程中受到各种人为或随机因素的影响,使得扫描结果包含噪声点大量的冗余数据,这样就不利于后续的油泥模型的B面和A面制作工作。文章针对激光三维扫描方法得到的油泥模型的点云数据,采用了快速、有效地处理技术。在最大程度上获得了较好的点云数据结果,为后续的曲线曲面重构工作做出了理想的处理过程。
油泥模型;点云数据;逆向工程
10.16638/j.cnki.1671-7988.2016.12.057
CLC NO.: U466 Document Code: A Article ID: 1671-7988 (2016)12-166-04
引言
油泥模型的设计与制作在汽车造型设计中起着承前启后的关键性作用。油泥模型的应用,一方面,它是连接设计与工程的媒介,即将二维的平面视图、效果图转化为真实的三维实物,能够有效的弥补平面表达中不能解决的许多空间问题,使设计对象更直观、更具体。另一方面,技术人员将借助油泥模型对汽车造型的空间尺寸数据进行扫描并应用于汽车模具生产、加工。
实现逆向工程中的两个必须的步骤是数据采集和数据后续处理。其中数据采集和处理的完成质量直接影响到所建几何模型的质量。在数据采集过程中,我们采用ATOS光栅式扫描仪获得油泥模型的点云数据。但在实际采集过程中,由于环境的影响,在采集点云数据中往往含有大量的噪声点,如果这些数据不加处理而直接用来拟合曲线曲面,其造型的质量将远远达不到实际工程的要求,也就没有实际意义,因此必须对数据进行处理。
1、油泥模型激光三维扫描点云数据
目前我国汽车工业中,车型以及许多关键零部件都是直接进口模具,没有设计资料。而整个汽车工业的国产化又非常重要,其中汽车覆盖件也属于这种情况,都是在实际模型或油泥模型上不断加以修改,最终形成产品模具。国内很多人在做这方面的工作。激光三维扫描系统可以很好完成逆向工程的数据获取需要,为后面的快速成型、CAM等打下坚实的基础。我们利用ATOS光栅式扫描仪,对油泥模型进行激光三维扫描,所获得的油泥模型“点云”如(图1)所示。三维扫描软件导出IGS格式的三维数据文件,为后续的“点云”处理、曲面建模、实体生成等提供基础。
在激光三维扫描过程中,我们获得了初步的点云数据。由于在实际扫描过程中,存在遮挡、模型特性以及步进振动等问题。如(图1)所示我们可以发现,在点云数据中,存在点云数据量大、表面点阵有重点和噪声点等问题。这对于点云数据的曲面重构带来极大的不便,因此需要通过噪声点删除、点云数据精减、点云平光顺等这些后续工作获得较好的、完整的“点云”。
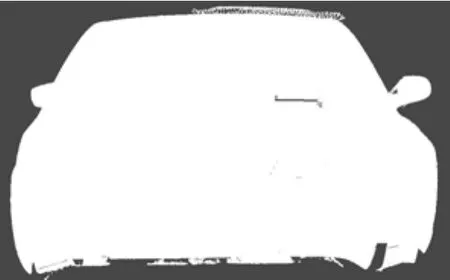
图1 油泥模型点云
2、油泥模型点云的处理
在我们对油泥模型进行激光三维扫描过程中,由于实际扫描过程中受到各种人为或随机因素的影响。经检测,发现扫描结果包含噪声,并且数据间缺乏明显的拓扑关系,这些会给后续的曲面重构带来很大的麻烦。
因此必须对点云数据进行处理,一般需要对原数据进行再加工,在处理过程中,必须注意检查数据的完整性及数据的一致性,对其中的噪声数据进行去除,对海量的数据进行精简,常见的数据处理方法为:噪声点删除、点云数据精简、点云光顺、点云拼合。
2.1 噪声点的删除
在任何的一种曲线曲面构造过程中噪声点的危害很大,有时会因为噪声点的影响而使整个构造算法失败。而在本次对油泥模型的点云数据采集过程中,噪声点的引入是不可避免的,因此必须进行噪声点的删除。统计结果表明,在本次扫描得到的点云数据中,有1% ~3%的噪声点要予以去除。目前噪声点的去除方法如下:
2.1.1 直接法删除
对明显的异常点和杂点,可通过肉眼判别,并用人机交互的方式直接删除。
2.1.2 曲线检查法删除
通过截面的首末数据点,用最小二乘法拟合得到一条样条曲线,曲线的阶次可根据曲面截面的形状决定,通常为3~4 阶,然后分别计算中间数据点pi到样条曲线的距离‖e‖,如果‖e‖E≥[ε]([ε]为给定的允差) ,则认为pi 是坏点,应予以剔除如(图2)。
2.1.3 弦高差方法删除
连接检查点的前后2 点,计算中间数据点pi 到弦的距离‖e‖,如果‖e‖E ≥[ε]([ε]为给定的允差), 则认为pi 是坏点,应予以剔除。这种方法适合于测量点均匀且较密集的场合,特别是在曲率变化较大的位置如(图3)。
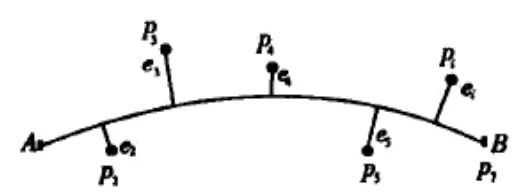
图2 曲线检查法

图3 弦高差方法
2.1.4 高斯、平均或中值滤波算法删除
高斯滤波器在指定域内的权重为高斯分布,其平均效果较小,故在滤波的同时能较好地保持原数据的形貌。平均滤波器采样点的值取滤波窗口内各数据点的统计平均值。而中值滤波器采样点的值取滤波窗口内各数据点的统计中值,这种滤波器消除数据毛刺效果较好。
油泥模型主要使用了(1)、(4)第方法删除噪声点如(图4)所示。

图 4 删除噪声点后的模型点云
2.2 点云数据精简
在本次的扫描中,对油泥模型进行激光三维扫描的数据获取速度快,单次扫描能获得上万个数据点。因此所获得的扫描数据点群密度很大,存储处理与显示都消耗了大量的时间和计算机资源,并且影响到后续曲面构造的光顺性。因而提取点云数据中反映曲面形状的点,去除大量冗余数据点。即对大量点云数据的精简处理也是逆向工程中的一项关键技术。对于扫描线点云,其中使用较常见的有取样法、弦高偏移法、非均匀网格法等。
2.2.1 均匀取样法
均匀取样法是根据数据点的存储顺序,每隔(m-1)个数据点采取一个数据点,其他的数据点都被忽略,这里的m成为间隔(采样率)。当均匀采样法应用于有序数据(如扫描数据)时,便成为等间距采样法;而应用于非有序数据时,由于数据排列的无规律性模拟了均匀采样的随机性,因而称为随机采样法。它仅适合于实体是平面或接近于平面的情况下使用,缺点是很容易丢失边界特征及曲率变化较大区域的信息。
2.2.2 弦高偏移法
根据抽样定理,抽样点的疏密应随曲面曲率的变化而变化,曲率越大抽样点越密。针对实际情况,由于激光扫描获取的实物基本上是凸壳的,或者是多个凸壳的并集,而且扫描的数据是一条条的数据线,可以用基于弦值的方法对数据进行初步的线压缩。这种方法在选点时由两个参数决定,一个是最大偏移距离,另一个是已经保留的点与下一个保留点的两点之间的距离。因为弦值的高低根曲率有密切关系,这种筛选数据点的办法对于凸壳数据具有比较明显的筛选效果。弦高偏移法能根据法矢的变化情况对数据进行精简,这是比均匀取样法优胜的地方。它可以满足计算效率较高,曲率变化较大区域的数据精度。缺点是对于曲率变化较小且较平滑区域的精度不能得到很好的保证。
2.2.3 非均匀网格法
非均匀网格方法,分为单项非均匀网格方法和双向非均匀网格方法。在单向非均匀网格方法中,采用角度偏差方法从点云数据中获取特征点。角度反映了曲率信息,角度小的地方曲率也小,反之,曲率也大。通过这些角度,提取曲率较大处的点。双向非均匀网格方法通过计算每一个点的法向向量,并以这一信息为基础来进行数据精简。对点云数据进行三角化。使用邻近三角形的法向向量来确定某一点的法向向量,计算所有点的法向向量后,就生成了网格平面。网格的最小尺寸根据零件形状的复杂程度而变化,网格规划完成以后,采用中值滤波的方法从每个网格中选取一个代表点。这种双向方法与单向方法相比,将从点云中提取更多的点,它将更精确地反映零件的形状。
在完成噪声点删除步骤后,采用非均匀网格法中的双向非均匀网格方法和弦高偏移法进行点云数据精简处理,如(图5)所示。

图5 精简后的模型点云
经检验表明,利用非均匀网格法可以获得理想的精简结果,结果如(表1)所示。

表1
2.3 点云光顺
为了降低或消除油泥模型点云数据中噪声对后续汽车覆盖件建模质量的影响,有必要对精简后的点云数据结果进行光顺滤波。
一般而言,在扫描过程中时,由于种种原因,会造成噪声点,可选用多种滤波,对点云进行光顺处理,提高整个点云的质量。根据点云的特点采用合适的光顺方法,尽量保持点云的轮廓原状。数据光顺通常采用标准高斯、平均或中值滤波算法,滤波效果如(图6)所示。

图6
2.3.1 高斯算法
高斯滤波器在指定域内的权重为高斯分布,其平均效果较小,故在滤波的同时能较好地保持原数据的形貌。
2.3.2 平均算法
平均滤波器是利用滤波窗口内各采样数据点的统计平均值来代替当前点。二维图像中的中值滤波器是查找采样点的值,取滤波窗口灰度值序列中间的那个灰度值为中值,用它来代替窗口中心所对应象素的灰度。
2.3.3 中值算法
中值滤波是一种有效的非线性滤波,常用于消除随机脉冲噪声。
根据精简后点云数据的特点,本文采用高斯滤波器对点云数据做光顺处理。处理后的效果图如(图7)所示,由图可以看出,该方法不仅有效的对数据做出了光顺处理,而且在滤波的同时最大程度上保持了点云数据的轮廓原貌。

图 7 平滑处理后的模型数据
2.4 点云数据拼合对齐
为完成对整个油泥模型的非接触三维扫描,需要对油泥模型从各个视角分5块进行扫描。由于在扫描不同区域时,都是在扫描位置对应的默认设备坐标系下进行的,因此多次扫描所对应的局部坐标系并不一致,所以必须把各次扫描对应的局部坐标系统一到同一坐标系,并消除相邻2次扫描间的重叠部分,以得到被测物体表面的完整数据。
需要将分块扫描所得到的多片点云数据拼合在一起,即点云数据的拼合对齐,其处理方法有2 种:
2.4.1 专用的测量装置
通过专用的测量装置实现数据的拼合对齐,它要求设计一个自动工件移动转换平台,用来直接记录工件在扫描过程的移动量和转动角度。
2.4.2 专业计算机软件
用专门设计的计算机软件(Imageware)实现多片块点云数据的拼合对齐,从而实现原型的再构,这是现在非接触三维扫描最常用的多片块点云数据拼合对齐方法。分块扫描得到的点云数据常可看作是一个刚体。数据对齐可以归结为三维刚体的坐标转换问题,即根据一些预先指定的最佳匹配规则,通过坐标变换,把部分重叠的两片点云最优地对齐如(图8)。
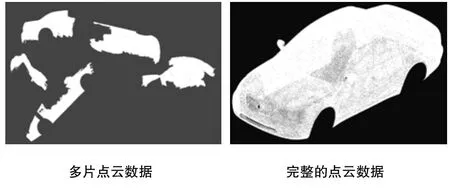
图8
3、总结
点云数据后期处理是逆向设计中的关键技术之一。如何对数据进行后期处理,使处理后的数据减少计算复杂性,提高效率,保证重建曲面的精度,使点云密度随着曲面曲率的变化而变化是未来逆向设计中点云数据处理的发展趋势;选择合理的方法对海量点云数据进行处理,对于保证曲面模型的重建精度和提高数据处理效率至关重要。针对激光三维扫描方法得到的油泥模型的点云数据,我们采用了噪声点删除、精简、光顺、拼合对齐等快速、有效的点云处理技术,从而在最大的程度上获得了较好的点云数据结果,为后续的曲线曲面创建提供基础。
[1] 刘之生.反求工程技术.北京:机械工业出版社,2003.
[2] 罗大兵,高明逆.向工程中数字化测量与点云数据处理.机械与制造,2005.
[3] 周力辉.汽车油泥模型设计制作.北京:清华大学出版社, 2006.
Clay model car postprocessing method of point cloud data
Si Shengzhi
(Anhui jianghuai Automobile Co., Ltd., Auhui Hefei 230601)
Clay model is essential to A kind of automobile modeling design method, it is designers from 2 d rendering to the real model, the method of scanning result is good or bad directly affect the clay model B surface and A surface post-production effect. Reverse engineering design is presented in this paper, under the guidance of clay model appearance features and technical requirements, using non-contact scanning methods of scanning clay model. Because the actual scanning process influenced by all kinds of man-made or random factors, makes the scan results A lot of redundant data containing noise point, which is not conducive to the follow-up of clay model B side and making A face. Laser 3 d scanning method, this paper get the clay model of point cloud data, using the rapid and effective processing technology. In the largest extent, the good point cloud data obtained as a result, the work for the follow-up of curve surface reconstruction has made the ideal process.
Clay model; Point cloud data; Contrary engineering
U466
A
1671-7988 (2016)12-166-04
司圣志,就职于安徽江淮汽车股份有限公司。