分布式CAN、ZigBee混合物联网*
2017-01-05周娜何铮
周娜,何铮
(1.海口经济学院,海口 571127;2.海南政法学院)
分布式CAN、ZigBee混合物联网*
周娜1,何铮2
(1.海口经济学院,海口 571127;2.海南政法学院)
在组建大型物联网系统中,采用分布式CAN-ZigBee混合物联网架构是融合了全ZigBee系统、多叠CAN系统、分布式物联网系统优点的一种优化设计。它在测控小数据实时传输中,以高速、安全、硬件滤波点到点的CAN传输取代以太网传输,同时保留了分布式系统的优点。在大系统中,各种感知网的节点统一赋以全系统唯一地址,从而可采用简单、快捷的路由实现节点任意布设、移动和跨子网的测控。
物联网;分布式;CAN总线;ZigBee
引 言
在当今办公楼、别墅等智能化的系统集成中,随着各种设备(如灯光、家电、音响、安防、环境、门禁、养生等)的接入,智能测控感知网的规模越来越大,一个系统需接入的感知节点数目从几十上升到几百,甚至过千,而且传统设备多是有线RS-485等接口类型的,而新开发的设备多是ZigBee等无线接入接口类型的。
能接入成百上千个节点的大系统,当前主要只有3种方法:全ZigBee系统(见图1)、多叠CAN系统(见图2)和分布式互联网系统(见图3)。
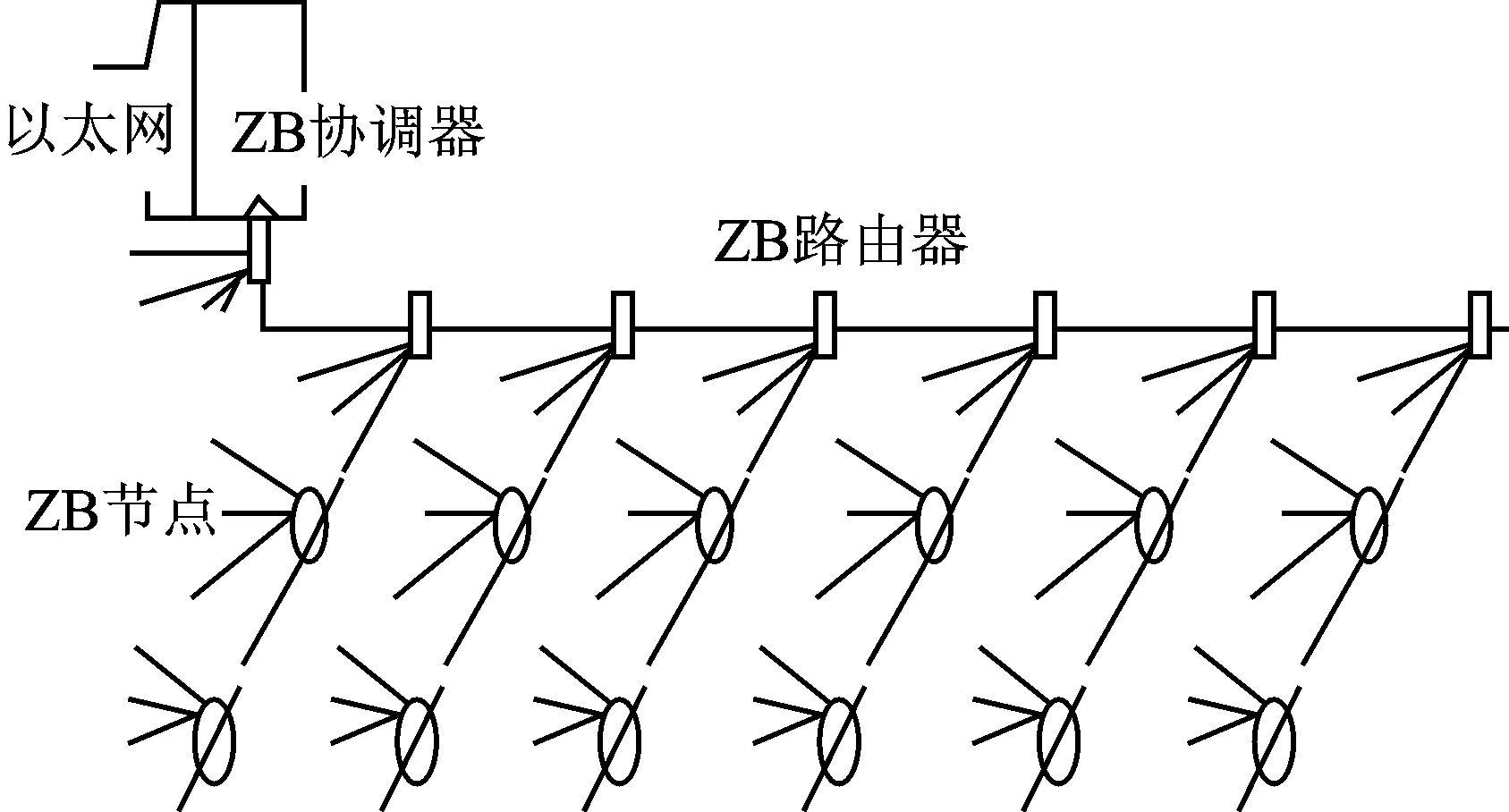
图1 全ZigBee系统

图2 多叠CAN系统图

图3 分布式互联网系统
全ZigBee系统具有可跳转、自组网、可接入节点数多(16位短地址,可接入65 535个节点)、节点功耗低等优点,而最大的优点在于无需布线、可随意增补节点,且节点可变换位置,因而在当今得到了广泛的应用。
但ZigBee无线接入网若采用网状拓扑结构,安全通达性好,但路由复杂、时延大,而且不确定,实时性不好;若采用树型结构,固定节点地址,路由算法简单,但在大范围内节点多时,树型结构的辈份太多、跳转多、时延大,而且可靠性差,当树型路由器中一跳失效,其子系的工作基本全部失控。
多叠CAN系统具有安全性高、传输速度快、实时性好的优点,但只能有线传输,需布线,因而系统架设后,变更增补节点困难,不能移动放置,总体成本较高。

图5 CAN-ZigBee混合物联网地址分配
分布式互联网系统接入性特别好,通过网关能接入各种有线及无线感知网组成的庞大系统,并且它是分布式结构,当主干出现问题,每个感知网都能自己独立工作。但因为互联网是基于IP及MAC的通信,对嵌入式系统而言,对下面感知网的增加节点、变换位置、移动部署不利。同时互联网通信时延大,偶尔会出现丢包,实时性不好。当智能系统需要在各感知网间、节点间相互实时测控时,它的效果不是太好。
针对这个问题,设计了一种分布式CAN/485-ZigBee混合物联网,其拓扑结构如图4所示。它利用速度快、可靠性高、可硬件滤波、直接点到点传输的CAN通信取代ZigBee网络中的传输主干,进而取代分布式互联网系统中的以太骨干网,组成统一编址的分布式CAN-ZigBee混合物联网。

图4 分布式CAN-ZigBee混合物联网
这种分布式CAN-ZigBee混合物联网的优点在于:
① 在同一物联网系统中CAN、ZigBee、RS-485等多种通信方式混用,方便了各种设备的直接接入;
② 系统中有线通信与无线通信混用,结构方式有多种变化,有利于前期接入和后期自由调整节点;
③ 整个系统的每一个节点,不论何种通信媒介都统一混合编址,便于组建大系统,在系统内实现快速跨媒介控制和交换数据;
④ 所有节点统一混合编址,都采用固定地址、固定地址路由算法,便于系统设计、生产、安装、维护和改变;
⑤ 远程主干传输由CAN代替ZigBee,利用CAN特有点到点的直传技术,大大克服了远距离ZigBee网络数据传输多点接力路由速度慢而且可靠性差的弊端;
⑥ 采用分布式结构,将庞大的一个协调器,众多辈系的ZigBee网络改成众多四辈小家庭的分布式的ZigBee网,最多四级跳传,大大提高了系统的可靠性。
1 系统地址分配
CAN-ZigBee混合物联网中,不管何种传输媒介类型的节点,都有一个全系统唯一的16位地址,使其成为本节点在整个大统一系统中的标识。其16位地址分配见图5。
在16位地址中,高8位为一级CAN主干网络地址,由于受CAN系统的制约,一级网络最多只能有32个(一个CAN接口,00~1F)或64个(两个CAN接口,00~1F、20~3F)。
在低8位中,高3位为二级子网地址,为了和CAN兼容及子网容量不要太大,所以每个子网分配约32个节点,这样正好形成8个子网,子网号为0~7,0为CAN(或RS-485)子网;1~7号为ZigBee子网(协调器、中继器地址分别为20、40、60、80、A0、C0、E0)。
最低5位为子网中测控节点在子网内的地址。每个子网测控节点为31个(地址为01~1F),若有协调器,则节点共32个(加入XX20协调器),若有中继器,则节点共33个(加2个中继器XX40、XX80、XXA0、XXC0、XXE0)。
整个系统地址容量为8 192,但测控节点最少可接入31×8×31=7 684个,已完全满足要求。若还要组建更大的系统,可以从主网关(地址0000)接出2路CAN总线,这样,整个系统地址容量为8 192×2),测控节点最少可接入31×8×31×2=15 368个。
1.1 主网关(根节点,地址为0x0000)
0000节点为系统根节点(主网关),它的CANA接口是CAN主干通信网的主节点,可接31个CAN-ZigBee中继器(地址为0x0100、0x0200、…、0x1F00),它的CANB/485接口可接入CAN/485测控节点(地址为0001~001F)。
它的ZigBee接口为ZigBee系统的协调器(地址为0x0020),下面可接有深度为4,每个父亲最多有32个孩子,孩子中有2个是路由器的树型ZigBee系统。
1.2 CAN-ZigBee路由器(地址为0x0100、0x0200、…、0x1F00)
CAN-ZigBee路由器在一级主干网上的地址为0x0100、0x0200、…、0x1F00。它的下行有2个接口,一个是下行CAN/485接口,每个CAN/485接口可自行接入31个CAN/485测控节点:0101~011F、0201~022F、…、1F01~1F1F,最多可有31×31=961个CAN/485节点;另一个是ZigBee接口,为下行ZigBee系统的协调器,它下面可接有深度为4,每个父亲最多有32个孩子,孩子中有2个是路由器的树型ZigBee系统。这31个协调器地址为0x0120、0x0220、0x0320、…、0x1F20。
1.3 ZigBee系统(具有32个相同树型结构)
(1) 协调器 32个(0x0020、0x0120、0x0220、0x0320、…、0x1F20)
16位地址中高字节为一级网络号:00、01、02、…、1F;低字节为协调器根地址20。
(2) 路由器(32×6个)
每一个协调器都组成一个深度为4,每个父亲最多有32个孩子,孩子中有2个是路由器的树型ZigBee系统。这32×6个路由器地址为:0x0040、0x0060、0x0080、0x00A0、0x00C0、0x00E0;0x0140、0x0160、0x0180、0x01A0、0x01C0、0x01E0;……;0x1F40、0x1F60、0x1F80、0x1FA0、0x1FC0、0x1FE0。
(3) ZigBee测控节点(32×31×6个)
每个路由器下可接31个测控节点,它们的地址为:0x0041~005F、0x0061~007F、0x0081~009F、0x00A1~00BF、0x00C1~00DF、0x00E1~00FF;0x0141~015F、0x0161~017F、0x0181~019F、0x01A1~01BF、0x01C1~01DF、0x01E1~01FF;……;0x1F41~1F5F、0x1F61~1F7F、0x1F81~1F9F、0x1FA1~1FBF、0x1FC1~1FDF、0x1FE1~1FFF。
2 路由算法
2.1 0000节点
0000节点方框图如图6所示。
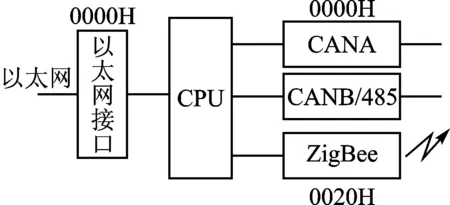
图6 0000节点方框图
① 目的地址为0000H的信息均为上行发往以太网(云)的信息,该节点CPU配备有地址—信息代码转换表,以帮助上传/下达控制/状态信息。
② 该节点同时为CAN网及ZigBee网关节点(CAN接口地址为0000H, ZigBee接口为协调器,地址为0020H),发往0001~001F节点的信息均转从CANB/485口发出,发往01XX~0FXX的信息均转CANA口发出,发往002X~00FF的信息均转ZigBee口发出。
③ 该节点也可组成最小系统,接入31个CAN/485节点(0001~001F),31个ZigBee节点(0021~003F)。
2.2 CAN-ZigBee中继器
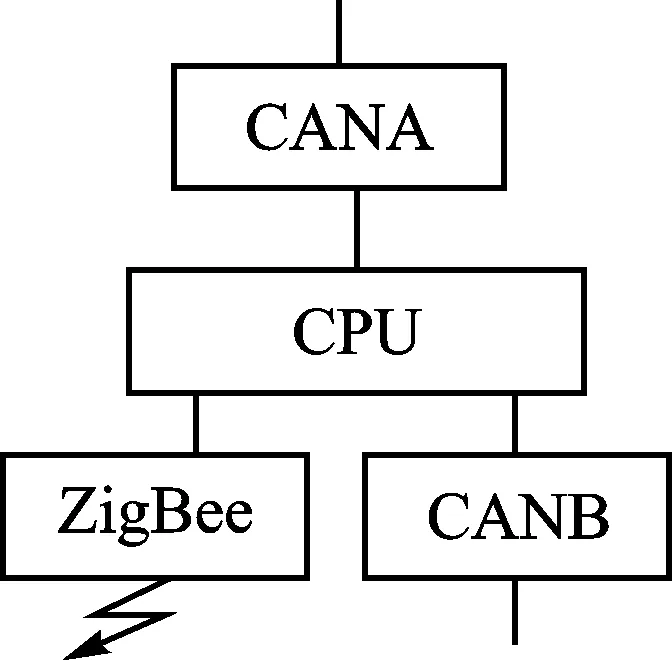
图7 中继器框图
这是位于主干网络(CAN总线)上的CAN-ZigBee中继器,其高字节为CAN一级子网号,低字节均为00,组成本中继器地址(0000、0100、0200、1F00)。中继器框图如图7所示。
① 第1字节为本一级子网号的信息,均通过CANA滤波自动接收,再按地址路由算法,将第2字节除以32,整数为第二级子网号。二级子网号为0的节点数据通过CANB发送到各CAN测控节点; 二级子网号为0的节点数据通过CANB发送到各CAN测控节点;二级子网号非0的节点数据发送到ZigBee协调器。
② ZigBee协调器接收的帧地址二级子网号非0的节点数据均直接发送,其中二级子网号为1的节点数据均直接发送给各测控节点;二级子网号为2~7的节点数据均发送到ZigBee中继器。
③ CPU接收到CANB发来的数据,发往非本一级子网地址的数据全部通过CANA中继器向外转发,通过CAN滤波机制发往目的一级子网;发往本一级子网地址的数据全部通过ZigBee协调器转发。
④ CPU接收到ZigBee发来的数据,发往非本一级子网地址的数据全部通过CANA中继器向外转发,通过CAN滤波机制发往目的一级子网;发往本一级子网地址的数据全部通过CANB中继器发往各CAN测控节点。
2.3 ZigBee中继器
每个ZigBee协调器组成4级深度,每级有31~33个节点(其中可有2个中继器)的树型ZigBee网。每个中继器均按固定地址路由算法计算路由。ZigBee网络拓扑结构图如图8所示。
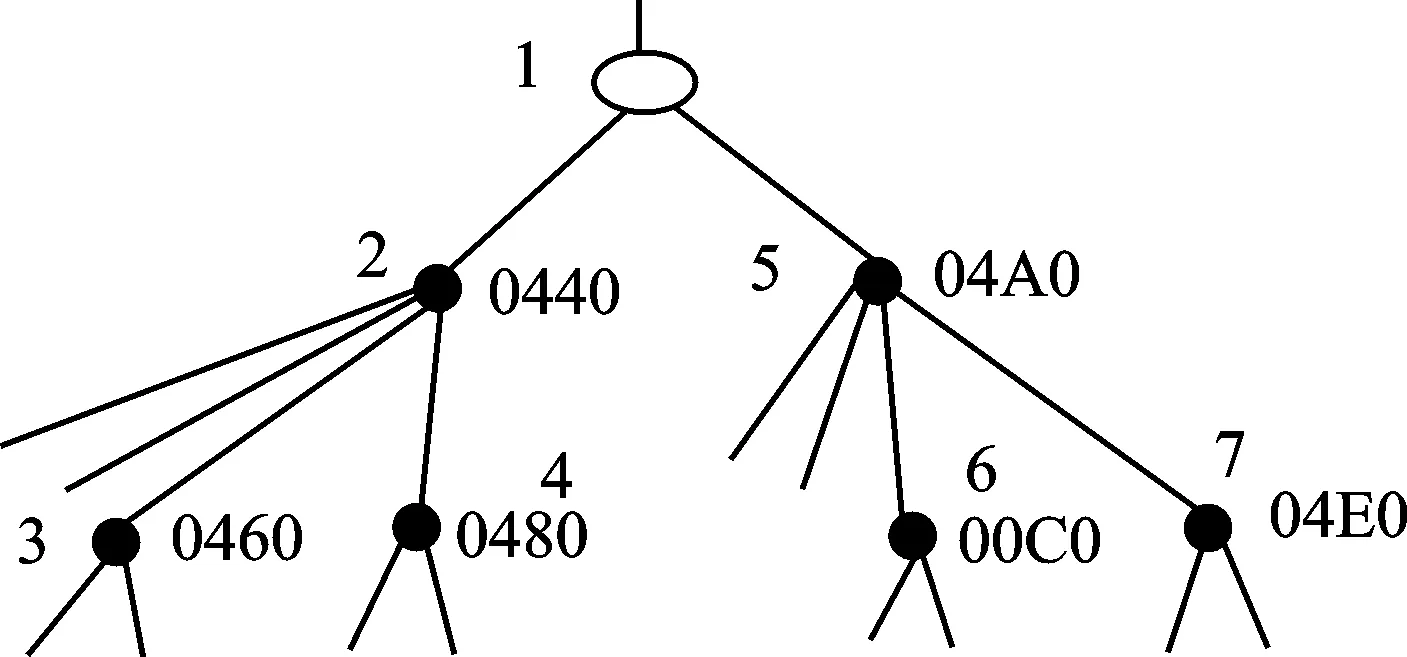
图8 ZigBee网络拓扑结构图
① 目的地址为0000或第1字节(一级网络号)非本网络的,均向父辈中继器或协调器发送。
② 目的地址第1字节(一级网络号)为本网络的,将目的地址第2字节除以32,整数为第二级子网号,尾数为测控节点号。
(a) 若是发往本二级子网及本子网的子中继器的测控信息,直接发往子节点及子中继器;
(b) 若是发往非本二级子网的及非本子网的子辈中继器的,向上级父辈中继器转发。
3 硬件组成
在CAN-ZigBee混合物联网中,最主要的设备是主网关及CAN-ZigBee中继器,设计选用了恩智浦的LPC1768。LPC1786采用Cortex-M3内核,它集成有1个以太网MAC、2路CAN收发器及多个UART接口、SPI接口。
如图9所示,全部选用,则成为CAN/485-ZigBee主网关;若不要DP83848(以太PHY),则组成CAN/485-ZigBee中继器。

图9 网关框图
[1] Guangzhou ZLGMCU Development.LPC1700 用户手册,2010.
[2] TI.CC253x System-on-Chip Solution for 2.4 GHz IEEE 802.15.4 and ZigBee Applications User's Guide.
[3] 周武斌.ZigBee无线组网技术的研究[D].长沙:中南大学,2009.
[4] 何铮,周娜.基于Cortex-M3/M0的智能家居中的感知与控制子网设计[J].单片机与嵌入式系统应用,2014(12).
Large-scale Internet of Things Based on Distributed CAN and ZigBee
Zhou Na1,He Zheng2
(1.Haikou College of Economics,Haikou 571127,China;2.Hainan Institute of Political Science and Law)
In the construction of large-scale Internet of things,the use of distributed CAN-ZigBee network architecture is a kind of optimization design which combinates the whole ZigBee system,multi-stack CAN system,distributed networking system.It in the small control data real-time transmission,transmitted with high speed,safety,hardware filtering nap can replace the ethernet transmission,while retaining the advantages of distributed system.In the system,the various sensor network nodes are unified to the only system wide address,which can adopts a simple and high-efficient routing to achieve any node layout,mobile and inter subnet control.
internet of things;distributed;CAN bus;ZigBee
2016年度海南省高等学校科学研究项目:物联网养生系统开发及产业化的研究(项目编号:Hnky2016-55)。
TP273
A
�士然
2016-06-08)
