变磁通轴向磁场永磁电机机械动力学分析与弱磁能力研究
2017-01-03刘细平黄跃飞谢清华
刘细平 陈 栋 王 敏 黄跃飞 谢清华
(江西理工大学电气工程与自动化学院 赣州 341000)
变磁通轴向磁场永磁电机机械动力学分析与弱磁能力研究
刘细平 陈 栋 王 敏 黄跃飞 谢清华
(江西理工大学电气工程与自动化学院 赣州 341000)
对机械变磁通轴向磁场永磁电机(MVFAFPMEM)进行机械动力学与电磁场仿真分析,研究机械调磁装置的运动特性、角度调节能力及电机弱磁能力。基于机械系统动力学自动分析(ADAMS)虚拟样机技术,研究了不同转速下凸轮角加速度和弹簧形变情况,获得了转子错开角度随电机转速的变化规律;利用有限元方法计算了转子错开角度变化时的电机气隙磁场,研究了凸轮式机械调磁装置对电磁特性的影响。仿真结果表明,利用所设计的调磁装置,可使电机两转子间的错开角度在0°~21°范围内变化,弱磁能力较强。试验结果验证了理论与仿真分析的正确性,利用凸轮式机械调磁装置能够根据电机转速自动调节两转子间的相对位置,实现轴向磁场永磁电机气隙磁场强度的宽范围调节。
凸轮 机械变磁通 机械系统动力学自动分析 错开角度 弱磁能力
0 引言
变磁通永磁同步电机是一类具有可变气隙磁场的特种电机,磁通的改变可增大电机低速运行时的起动转矩或拓宽电机高速工作时的调速范围,在电动汽车和混合动力汽车驱动等领域具有广阔的应用前景,成为目前研究的热点。国内外学者专家相继提出了混合励磁电机[1-6]、永磁记忆电机[7-9]、机械变磁通永磁同步电机[10-18]等多种变磁通机理的永磁电机,并取得了较为丰硕的研究成果。
机械变磁通永磁电机为一种利用附加机械调磁装置实现气隙磁场调节的新型电机。此类电机的关键部件之一——机械调磁装置,直接影响电机的调磁效果和瞬态特性。因此,设计机械变磁通永磁电机时,需充分考虑该类电机机械部分的结构特征及运动特性,对电机进行机械动力学仿真研究。
基于机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems,ADAMS)的虚拟样机技术是以机械系统运动学与动力学分析为核心的高新技术,其在复杂机械系统的设计与仿真分析领域获得了广泛应用[19-21]。文献[19]基于CATIA构建了二级齿轮减速器参数化模型,利用ADAMS建立了减速器虚拟样机模型,通过动力学仿真获得了各级转速、齿轮啮合力及啮合频率。此外,虚拟样机技术已成为机器人[22-24]和断路器[25-27]研究领域的一种基本研究手段。北京矿冶研究院结合深海复杂的地质特征,运用ADAMS对混合越障模式的复合轮式采矿机器人进行了动力学建模仿真,获得了其在越障过程中的动力学特性和力学特性,验证了其具有较强的越障能力[22]。电气绝缘和电力设备国家重点实验室借助于ADAMS对塑壳断路器分闸过程中的连杆转换现象进行了研究,仿真分析和实验验证表明连杆转换位置的改进可以缩短该类断路器的分闸时间[25]。
本文针对机械变磁通轴向磁场永磁电机(Mechanically Variable Flux Axial Field Permanent Magnet Electrical Machine,MVFAFPMEM)双转子/单定子的结构特征,采用凸轮式机械调磁装置调节两盘式转子之间的相对位置;利用SolidWorks与ADAMS联合建立电机的三维虚拟样机模型,进行动力学仿真分析;研究不同转速下的凸轮角加速度和弹簧形变情况以及空载与负载情况下的转子错开角度随电机转速的变化规律。基于动力学仿真数据,计算机械变磁通永磁电机的气隙磁场分布和电磁特性;分析电机的弱磁能力;根据电机设计参数和仿真结果,试制一台样机,并开展试验研究,为机械调磁装置的结构和参数优化以及电机本体优化提供一定的理论依据。
1 电机结构与调磁原理
1.1 电机结构
机械变磁通轴向磁场永磁电机结构如图1所示,主要由盘式永磁电机和机械调磁装置两部分组成。盘式永磁电机采用双转子/单定子拓扑形式,结构简单紧凑,矩形永磁体表贴于转子背轭内侧,呈周向排列,两侧对应磁极极性相同;电枢绕组缠绕在环形无槽定子铁心上。
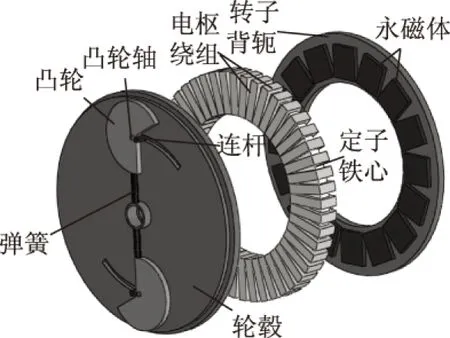
图1 机械变磁通轴向磁场永磁电机结构Fig.1 Structure of mechanically variable flux axial field permanent magnet electrical machine
机械调磁装置的实体模型如图2所示,其主要包括轮毂、凸轮、凸轮轴、连杆、弹簧及转子盘(此转子盘即为盘式永磁电机的其中一个转子盘)。此转子盘与转轴通过轴承装配,可自由转动以调节两转子间的相对位置;电机另一转子盘和轮毂同轴安装于电机转轴上,可随转轴同步旋转;连杆与转子盘以及凸轮轴与轮毂之间均为刚性连接;凸轮可绕凸轮轴任意旋转;弹簧一端固定于轮毂上,另一端与凸轮连接。为提高调磁装置的运行可靠性,其采用双凸轮结构。

图2 机械调磁装置结构Fig.2 Structure of mechanically flux-weakening device
1.2 调磁原理
凸轮式机械调磁装置的平衡位置由凸轮所受的离心力Fc和弹簧的反作用力Fs来决定。根据式(1)可知,凸轮离心力Fc与轮毂的旋转角速度ω、凸轮质量m及质心到转轴的距离r有关。在不同转速下,凸轮的平衡位置各不相同,故其质心的位置和质心到转轴的距离均会发生变化。因此,凸轮所受离心力的大小和方向均决定于电机转速。
Fc=mrω2
(1)
电机空载运行于基速以下有两种工作状态(本文中电机基速设定为1 800 r/min)。在转速极低时,弹簧形变程度非常小,凸轮处于原始位置如图3a所示;在电机转速较高时(未超过基速),凸轮的平衡位置将改变,然而由于凸轮轮廓曲线的特殊性,连杆未产生相对位移。两种工作状态下电机两转子盘均对齐,相当于一台普通的盘式永磁电机,如图4a所示。定子线圈两侧导体感应电动势之间无相位差,线圈感应电动势ec等于两侧导体感应电动势e的标量之和
ec=2ne
(2)
式中,n为线圈匝数。

图3 机械调磁装置的运行原理Fig.3 Operation principle of mechanically flux-weakening device

图4 机械变磁通轴向磁场永磁电机调磁原理Fig.4 Flux weakening principle of MVFAFPMEM

(3)
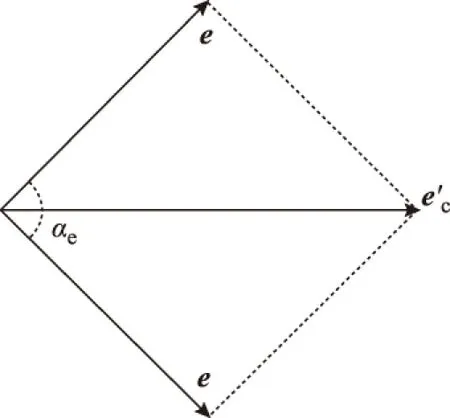
图5 线圈感应电动势矢量图Fig.5 Vector diagram of EMF induced in coil
对比式(2)和式(3)可知,通过机械调磁装置的离心运动,可使电机感应电动势减小,以实现弱磁控制;也可保持ecos(αe/2)的值恒定不变,达到变速恒压发电的目的。
2 电机虚拟样机模型
为便于观察分析机械调磁装置对电机两转子间错开角度的调节效果,采用SOLIDWORKS软件建立了机械变磁通轴向磁场永磁电机的三维实体模型,通过ADAMS/View的接口文件X_T实现了电机三维模型数据交换。
对于多刚体机械系统,ADAMS软件能够自动计算各构件的质心、转动惯量等参数,并在各构件间施加约束来定义构件间的连接方式和相对运动方式,以完成虚拟样机模型的建立。电机不同构件间的约束条件见表1。
表1 机械变磁通轴向磁场永磁电机构件间的约束条件
Tab.1 The constraints between parts of MVFAFPMEM

运动副名称构件1构件2固定副凸轮轴轮毂固定副连杆转子盘固定副定子大地固定副永磁体转子盘旋转副凸轮凸轮轴旋转副轮毂大地旋转副转子盘大地凸轮副凸轮连杆
图6为机械变磁通轴向磁场永磁电机的虚拟样机模型,其主要由物理实体模型、标准运动副以及外力等要素组成,可用于仿真分析整个电机系统的运动特性。
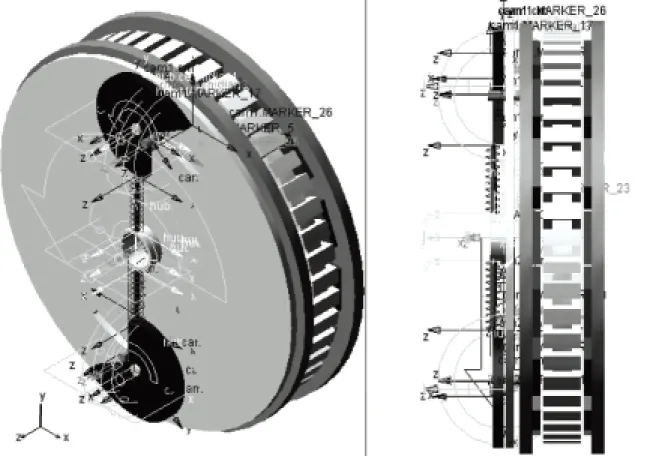
图6 机械变磁通轴向磁场永磁电机的三维虚拟样机模型Fig.6 The 3D virtual prototype of MVFAFPMEM
3 动力学仿真与分析
3.1 凸轮角加速度变化规律
凸轮起动瞬间,电机转速越高,凸轮所受离心力越大,其角加速度也将越大。图7给出了不同转速下凸轮在起动阶段的角加速度曲线,转速为3 000 r/min时的最大角加速度明显较高,与理论分析结果一致。

图7 起动阶段凸轮的角加速度变化曲线Fig.7 The angular acceleration curves of cam at the launch stage
电机设计时,为保证凸轮及弹簧的工作可靠性,需选取参数合适的弹簧以迅速有效地限制凸轮的加速运动,从而保证整个装置的安全可靠,为此需进行弹簧形变分析。
3.2 弹簧形变分析

图8 不同转速下弹簧形变长度的时变曲线Fig.8 The deformation of spring at different speeds
在仿真模型中,采用线性弹簧,即弹簧弹力系数和阻尼系数恒定,弹簧弹力越大,其形变程度也越大。电机空载运行于不同转速时弹簧形变长度的时变曲线如图8所示。由于对电机突加转速,在仿真开始时,弹簧形变长度将有一定的波动;当装置达到平衡状态时,弹簧的形变程度趋于稳定;随着转速的升高,弹簧形变程度非线性地增加。
图9分别给出了转速为1 800 r/min和3 000 r/min时弹簧的形变示意图。由图可知,3 000 r/min时的弹簧形变长度明显大于1 800 r/min时的数值。

图9 弹簧形变示意图Fig.9 Schematic representation of spring deformation
3.3 转子错开角度随转速变化规律
仿真条件不变,研究转子错开角度与电机转速之间的关系。图10为电机空载运行于1 800 r/min、2 167 r/min、2 667 r/min和3 000 r/min转速时,两盘式转子间错开角度的实时变化规律。转子间错开角度随转速的变化曲线如图11所示。
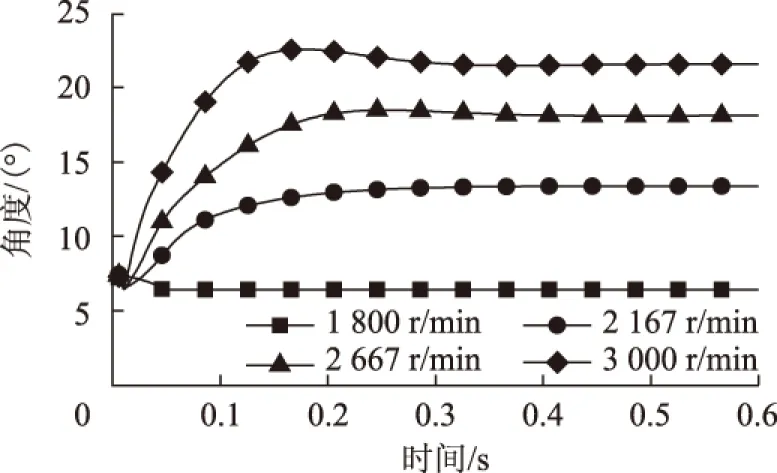
图10 空载时不同转速下转子间错开角度Fig.10 Mechanical stagger angle between rotors under different speed at no load

图11 空载时转子间错开角度的变化曲线Fig.11 The curve of mechanical stagger angle between rotors at no load
由图11可知,空载状态下,转子间错开角度的调节范围约为0°~21°。电机工作于1 800 r/min时,电机转子间几乎不存在错开角度,如图12a所示;当电机工作于3 000 r/min时,两转子间的错开角度约为15°,如图12b所示。仿真结果表明,利用机械调磁装置,电机两转子间的错开角度可随电机转速变化而改变,且调节范围较宽。

图12 电机转子间相对位置示意图Fig.12 The relative position between rotors
当负载发电运行时,电机转子受到制动性质的电磁转矩,转子错开角度较空载时将有所改变。仿真分析时,给电机转子施加一个单向力矩载荷。图13为电机负载运行于3 000 r/min时,转子间错开角度的时变曲线。当转子上的阻力矩从0 N·m逐渐增大到8 N·m时,转子错开角度则不断减小,但减幅有所下降。因此,电机外部负载状态将会影响机械调磁装置的角度调节能力。
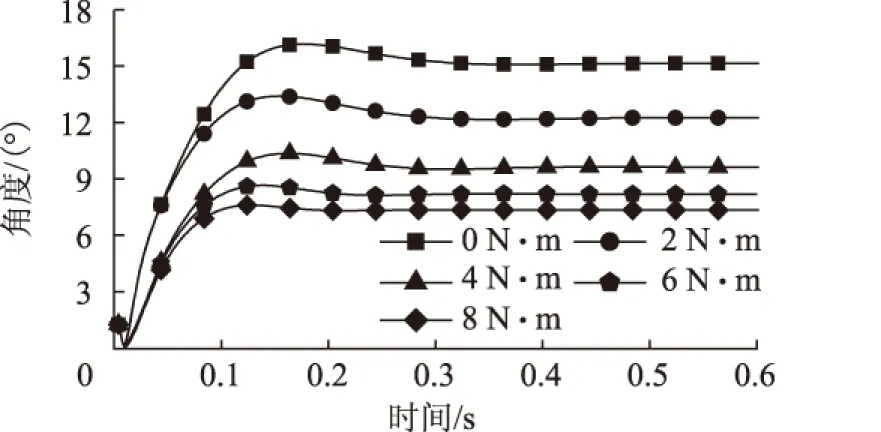
图13 不同负载状态下转子间错开角度的时变曲线Fig.13 The curve of mechanical stagger angle between rotors at different load
4 电机弱磁能力的分析研究
基于电机机械动力学仿真数据,利用有限元方法建立电机三维仿真模型,并计算电机的内部磁场及相关电磁特性。电机使用Ansys软件进行有限元仿真,采用的是第一类边界条件,即矢量磁位边界条件,定义边界上的矢量磁位为0(即理想磁绝缘),磁力线平行于边界线。图14为电机两转子盘错开角度α分别为0°和15°时,定子两侧轴向气隙磁通密度的分布规律。由图可知,电机转子处于对齐位置时,左右两侧气隙磁通密度完全对称;电机转子处于错开位置时,两侧气隙磁通密度在空间分布上存在一定的相位差β,且β值与α值相同,均为15°,从而导致电机定子铁心中合成磁通密度的变化。
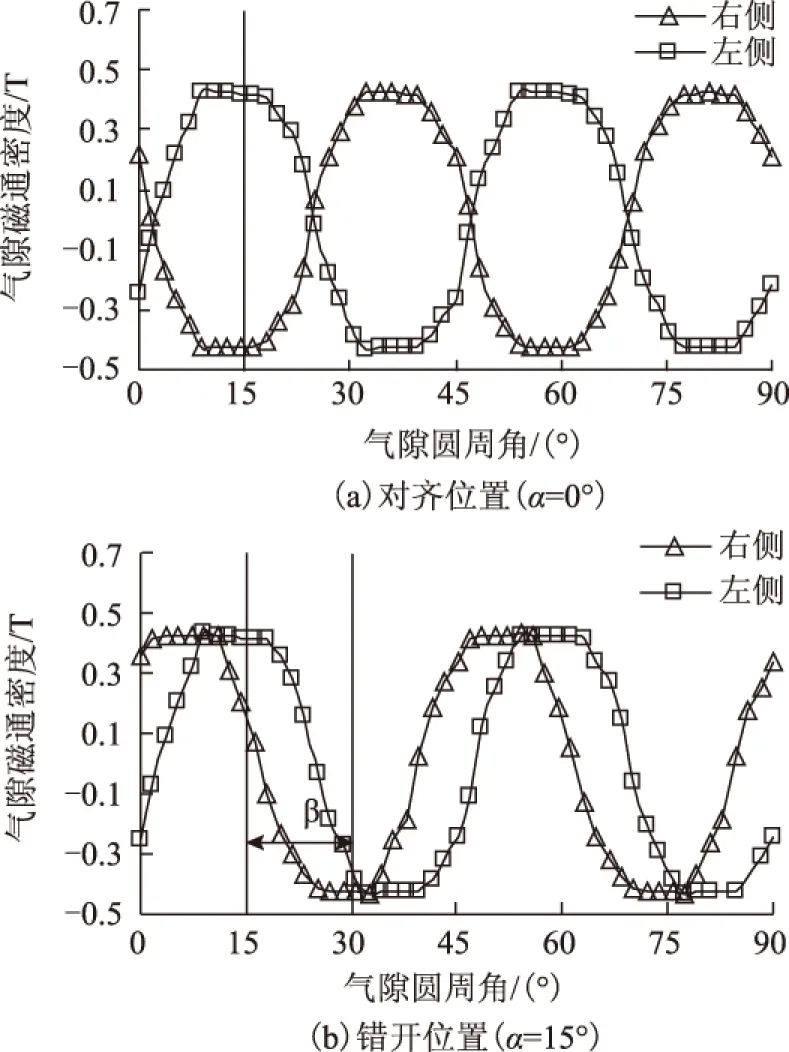
图14 电机轴向气隙磁通密度分布Fig.14 The axial air-gap flux density distribution
图15为电机转子盘在对齐位置与错开位置时定子铁心中的平均磁通密度云图。对比图15a和图15b中磁通密度云图颜色和色条,可知电机转子处于错开位置时,铁心磁通密度明显减小。
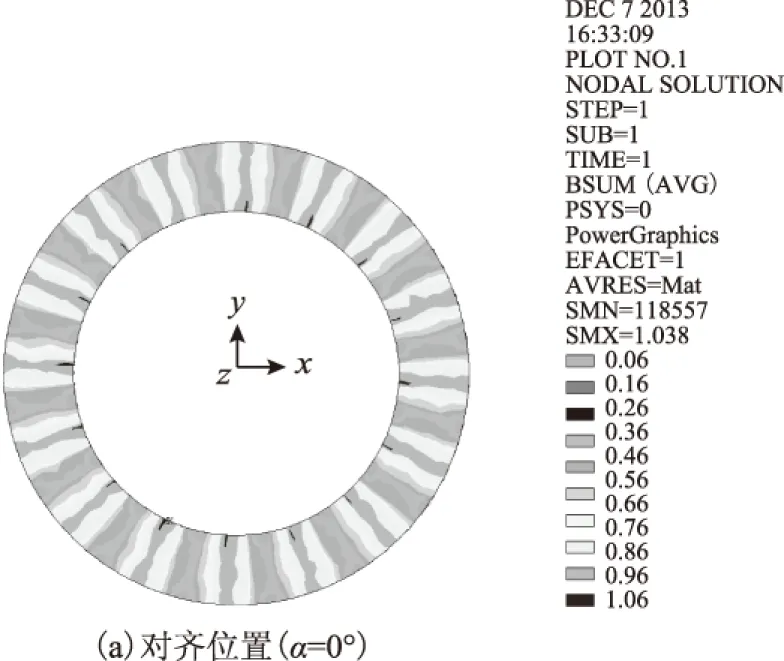

图15 电机定子铁心磁通密度云图Fig.15 Flux density distribution in stator core
电机相绕组磁链与转子盘错开角度的变化规律如图16所示,绕组磁链随转子间错开角度的不断增大而减小,且减幅较大。
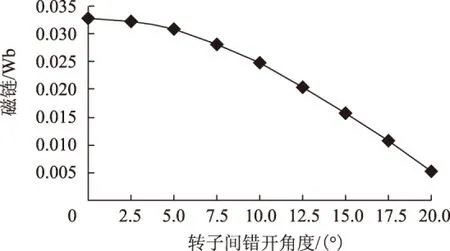
图16 电机相绕组磁链变化曲线Fig.16 The curve of winding flux linkage
图17为电机转速为3 000 r/min时的空载相绕组感应电动势,其中A表示无调磁装置,B表示采用调磁装置(两转子盘错开15°)。可知,此类机械变磁通永磁电机的弱磁比例有限元分析结果约为35.9%,弱磁效果较明显。
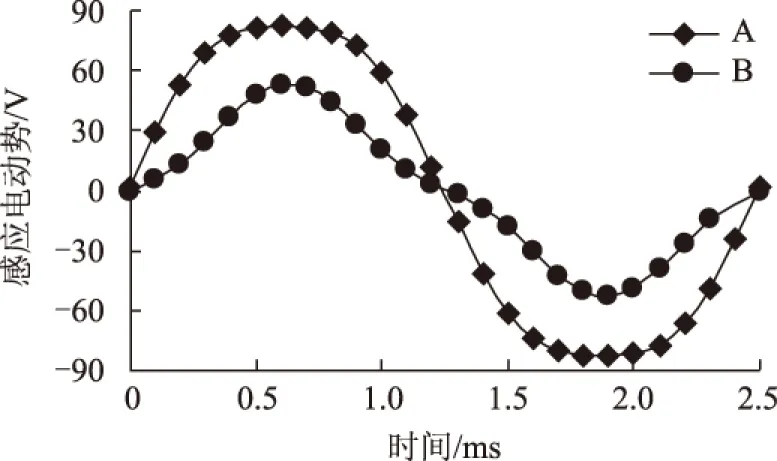
图17 电机空载感应电动势波形Fig.17 The curve of EMF at no load
上述研究结果表明,通过使用机械调磁装置,可调节转子间的相对位置,以改变机械变磁通永磁电机的内部磁场分布及电磁特性,且弱磁能力较好。
5 试验研究
5.1 样机与试验平台
本文在电机电磁设计、机械结构设计和仿真分析的基础上,确定了电机的基本参数(部分尺寸参数见表2),试制了一台小功率样机,如图18所示。电枢绕组缠绕于定子铁心上,且定子固定于机壳上,如图18a所示。矩形永磁磁钢通过铝合金固定盘固定于转子上,如图18b所示。机械调磁装置安装于转子盘外侧,其主要零部件为凸轮、轮毂和弹簧,如图18c所示。样机三相绕组由6个接线端子引出,其整机如图18d所示。
表2 机械变磁通轴向磁场永磁电机部分尺寸参数
Tab.2 Partial size parameters of MVFAFPMEM
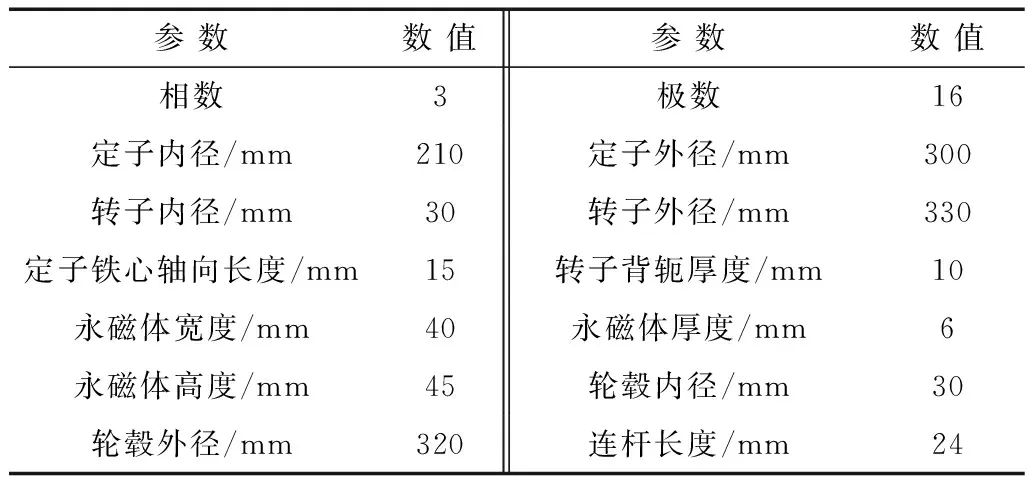
参数数值参数数值相数3极数16定子内径/mm210定子外径/mm300转子内径/mm30转子外径/mm330定子铁心轴向长度/mm15转子背轭厚度/mm10永磁体宽度/mm40永磁体厚度/mm6永磁体高度/mm45轮毂内径/mm30轮毂外径/mm320连杆长度/mm24

图18 样机组件Fig.18 Assemblies of prototype machine
图19为样机试验测试平台,主要由样机、原动机、伺服控制器、试验测试底座和示波器等构成。样机与原动机均经L型支架固定于铸铁底座上,两者通过联轴器同轴相连。原动机为一台130系列永磁伺服电机,由SLD07系列全数字式交流伺服控制器进行驱动控制,为样机提供所需的扭矩和转速。

图19 样机试验平台Fig.19 Testing platform of prototype machine
5.2 试验结果
图20为电机在转速为750 r/min时的空载感应电动势仿真波形和实测波形。对比可得,仿真值与实测值基本一致,误差较小,样机的设计研制较为合理。由于盘式电机制造工艺的局限性,在电机装配时两侧气隙长度难以保持完全一致,导致感应电动势波形发生了偏移。

图20 空载感应电动势波形(750 r/min)Fig.20 The curve of EMF at no load (750 r/min)
转速为3 000 r/min时电机弱磁能力的实测结果如图21所示,曲线N和Y分别表示电机在不采用调磁装置(两转子盘错开角度为0°)与采用调磁装置(两转子盘错开角度为15°)两种情况下的感应电动势实测波形。由图可知,与图17所示有限元分析结果基本一致,验证了机械调磁方式的可行性和理论分析的正确性。

图21 弱磁能力测试结果Fig.21 The test result of flux weakening ability
6 结论
本文通过对凸轮式机械变磁通永磁电机进行动力学仿真研究、分析机械装置的运动特性及角度调节能力、采用有限元方法计算电机的弱磁能力、研制样机和试验测试,得到以下结论:
1)凸轮角速度、弹簧形变长度随电机转速的变化规律。凸轮起动时,凸轮角加速度与电机转速呈正相关关系;凸轮稳定后,弹簧形变程度与电机转速呈正相关关系,为弹簧参数的合理选取提供了一定的理论参考依据。
2)电机具有较强的角度调节能力。电机空载时,两转子间错开角度的变化范围约为0°~21°,角度调节范围较广。电机负载工作时,机械调磁装置的角度调节能力随电机负载增大而变小,呈反相关关系。
3)电机具有较强的弱磁能力。研究表明机械变磁通永磁电机能够根据转速自动调节电机内部磁场强弱,具有较强的弱磁能力,在恒压发电及恒功率宽转速范围驱动领域具有广阔的应用前景。
此外,电机试验结果和电磁场有限元分析结果基本一致,验证了理论与仿真分析的正确性。
[1] 刘细平,郑爱华,王晨.定子分割式轴向磁通切换混合励磁同步电机三维有限元分析与实验研究[J].电工技术学报,2012,27(10):106-113. Liu Xiping,Zheng Aihua,Wang Chen.3-D finite element analysis and experiment study of a stator-separated axial flux-switching hybrid excitation synchronous machine[J].Transactions of China Electrotechnical Society,2012,27(10):106-113.
[2] 赵朝会,姬少龙,王新威.转子磁分路式径向结构混合励磁同步发电机的空载特性[J].电工技术学报,2012,27(9):198-203. Zhao Chaohui,Ji Shaolong,Wang Xinwei.No-load characteristic analysis on radial structure HESG of magnetic shunting type[J].Transactions of China Electrotechnical Society,2012,27(9):198-203.
[3] Sulaiman E,Kosaka T,Matsui N.High power density design of 6-Slot—8-Pole hybrid excitation flux switching machine for hybrid electric vehicles[J].IEEE Transactions on Magnetics,2011,47(10):4453-4456.
[4] 刘细平,左亮平,刁艳美,等.轴向磁通切换混合励磁电机励磁控制系统[J].电工技术学报,2013,28(10):97-102. Liu Xiping,Zuo Liangping,Diao Yanmei,et al.Excitation control system of axial flux-switching hybrid excited machine[J].Transactions of China Electrotechnical Society,2013,28(10):97-102.
[5] 黄允凯,周涛.基于等效磁路法的轴向永磁电机效率优化设计[J].电工技术学报,2015,30(2):73-79. Huang Yunkai,Zhou Tao.Efficiency optimization design of axial flux permanent magnet machines using magnetic equivalent circuit[J].Transactions of China Electrotechnical Society,2015,30(2):73-79.
[6] 张卓然,周竞捷,严仰光,等.新型并列结构混合励磁同步电机的结构与原理[J].中国电机工程学报,2009,29(33):83-89. Zhang Zhuoran,Zhou Jingjie,Yan Yangguang,et al.Construction and operation principle of a novel coordinate structure hybrid excitation synchronous machine[J].Proceedings of the CSEE,2009,29(33):83-89.
[7] 刘恒川,林鹤云,黄明明,等.可变磁通永磁记忆电机调磁特性[J].电工技术学报,2010,25(11):42-47. Liu Hengchuan,Lin Heyun,Huang Mingming,et al.Field-control performance of variable flux permanent magnet memory motor[J].Transactions of China Electrotechnical Society,2010,25(11):42-47.
[8] Liu Hengchuan,Lin Heyun,Fang Shuhua,et al.Permanent magnet remagnetizing physics of a variable flux memory motor[J].IEEE Transactions on Magnetics,2010,46(6):1679-1682.
[9] 周裕斌,陈阳生.一种混合永磁记忆电机的设计[J].电工技术学报,2015,30(14):51-60. Zhou Yubin,Chen Yangsheng.Design of a hybrid permanent magnet memory motor[J].Transactions of China Electrotechnical Society,2015,30(14):51-60.
[10]程树康,李春艳,寇宝泉.具有变磁阻励磁回路的永磁同步电动机电感参数[J].电工技术学报,2008,23(2):6-10. Cheng Shukang,Li Chunyan,Kou Baoquan.Research on inductance of PMSM with variable magnetic reluctance in exciting circuit[J].Transactions of China Electrotechnical Society,2008,23(2):6-10.
[11]Kou Baoquan,Li Chunyan,Cheng Shukang.Flux-weakening-characteristic analysis of a new permanent-magnet synchronous motor used for electric vehicles[J].IEEE Transactions on Plasma Science,2011,39(1):511-515.
[12]Liu X P,Wang M,Chen D,et al.A variable flux axial field permanent magnet synchronous machine with a novel mechanical device[J].IEEE Transactions on Magnetics,2015,51(11):1-4.
[13]徐妲,林明耀,付兴贺,等.混合励磁轴向磁场磁通切换型永磁电机静态特性[J].电工技术学报,2015,30(2):58-63. Xu Da,Lin Mingyao,Fu Xinghe,et al.Static characteristics of novel hybrid axial field flux-switching PM machines[J].Transactions of China Electrotechnical Society,2015,30(2):58-63.
[14]Tessarolo A,Mezzarobba M,Menis R.A new rotor design for flux weakening capability improvement in spoke-type interior permanent magnet synchronous machines[C]//Ninth International conference on Ecological Vehicles and Renewable energies (EVER),2014:1-9.
[15]Del Ferraro L,Giulii C F,Terrigi R,et al.Ironless axial flux PM machine with active mechanical flux weakening for automotive applications[C]//41st IAS annual Meeting,Conference Recoed of the 2006 IEEE Industry Applications Conference,2006:1-7.
[16]柴凤,欧景,裴宇龙.双定子锥形永磁同步电机的弱磁研究[J].电工技术学报,2013,28(7):12-18. Chai Feng,Ou Jing,Pei Yulong.Research on flux-weakening of dual-stator conical permanent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2013,28(7):12-18.
[17]Tessarolo A,Mezzarobba M,Menis R.A novel interior permanent magnet motor design with a self-activated flux-weakening device for automotive applications[C]//20th International Conference on Electrical Machines (ICEM),Marseille,France,2012:2603-2609.
[18]Capponi F G,Terrigi R,Caricchi F,et al.Active output voltage regulation for an ironless axial-flux pm automotive alternator with electromechanical flux weakening[J].IEEE Transactions on Industry Applications,2009,45(5):1785-1793.
[19]华顺刚,余国权,苏铁明.基于ADAMS的减速器虚拟样机建模及动力学仿真[J].机械设计与研究,2006,22(6):47-52. Hua Shungang,Yu Guoquan,Su Tieming.Modeling and dynamic simulation of reducer virtual prototype based on ADAMS[J].Machine Design and Research,2006,22(6):47-52.
[20]邱诚,夏伟.基于粉末本构模型和多体力学仿真的模架集成式粉末成形设备的设计[J].机械工程学报,2013,49(20):176-183. Qiu Cheng,Xia Wei.Design and manufacture of the mould-frame integrated powder forming equipment based on constitutive model of powder and simulation of multi-body dynamics[J].Journal of Mechanical Engineering,2013,49(20):176-183.
[21]黎育红,聂凌霄.基于ADAMS虚拟样机的多体系统动力学仿真[J].武汉大学学报(工学版),2011,43(6):757-761. Li Yuhong,Nie Lingxiao.ADAMS virtual prototype-based multi-body system dynamics simulation[J].Engineering Journal of Wuhan University,2011,43(6):757-761.
[22]姜勇.深海复合轮式采矿机器人越障性能研究[J].机器人,2012,34(2):137-143. Jiang Yong.Research on the over-obstacle capacity of the deep sea composite wheeled mining robot[J].Robot,2012,34(2):137-143.
[23]张学胜,赖庆仁,陈亚宁,等.负重外骨骼机器人的设计及其运动学动力学仿真[J].机械科学与技术,2013(4):568-572. Zhang Xuesheng,Lai Qingren,Chen Yaning,et al.The kinematics and dynamics simulation of the exoskeleton robot for bearing[J].Mechanical Science and Technology for Aerospace Engineering,2013(4):568-572.
[24]何富君,张灵聪,李秀伟,等.基于ADAMS的PGZX-1型炉管爬行机器人建模与仿真[J].机械科学与技术,2013(8):1182-1185. He Fujun,Zhang Lingcong,Li Xiuwei,et al.Modeling and simulating PGZX-1 pipe climbing robot with ADAMS[J].Mechanical Science and Technology for Aerospace Engineering,2013(8):1182-1185.
[25]季良,陈德桂,刘颖异,等.连杆转换位置对MCCB操作机构的影响及其优化[J].电工技术学报,2010,25(9):87-91. Ji Liang,Chen Degui,Liu Yingyi,et al.Analysis and optimization of linkage transfer position for the operating mechanism of MCCB[J].Transactions of China Electrotechnical Society,2010,25(9):87-91.
[26]Fang S,Lin H,Ho S L,et al.Characteristics analysis and simulation of permanent magnet actuator with a new control method for air circuit breaker[J].IEEE Transactions on Magnetics,2009,45(10):4566-4569.
[27]Fang S,Lin H,Ho S L,Transient co-simulation of low voltage circuit breaker with permanent magnet actuator[J].IEEE Transactions on Magnetics,2009,45(3):1242-1245.
Analysis of Mechanical Dynamics and Flux Weakening Ability for a Variable Flux Axial Field Permanent Magnet Electrical Machine
Liu Xiping Chen Dong Wang Min Huang Yuefei Xie Qinghua
(School of Electrical and Automation Jiangxi University of Science and Technology Ganzhou 341000 China)
To a mechanically variable flux axial field permanent magnet electrical machine (MVFAFPMEM),the mechanical dynamics simulation and electromagnetic analysis are implemented in this paper to obtain the motion characteristic and angle adjustment capability of the mechanically device,as well as flux weakening ability of MVFAFPMEM.The cam angular acceleration and spring deformation are studied at different speed,so the stagger angle between the two rotors with rotor speed can be obtained by virtual prototype technology named Automatic Dynamic Analysis of Mechanical Systems(ADAMS).The air-gap flux distribution of MVFAFPMEM at different stagger angle is calculated by finite element method (FEM),and its electromagnetic characteristics are studied by adopting the mechanical flux-weakening device.The simulation results show that the stagger angle between the two rotors can vary from 0 to 21 (deg) by this device,and a better flux weakening ability is obtained.The corresponding experiments are carried out to validate theory analysis,and it shows that the stagger angle between the rotors can be adjusted automatically by the rotor speed at a wide flux regulation range of MVFAFPMEM.
Cam,mechanical variable flux,Automatic Dynamic Analysis of Mechanical Systems,stagger angle,flux weakening ability
国家自然科学基金项目(51267006,51007033)、江西省科技项目(20153BCB23012,20151BBE50109)和江西理工大学清江青年英才支持计划资助。
2015-06-17 改稿日期2015-10-23
TM315
刘细平 男,1976年生,博士,教授,硕士生导师,研究方向为稀土永磁电机设计、风力发电及其相关控制、电力电子技术。
E-mail:liuxp211@163.com(通信作者)
陈 栋 男,1989年生,硕士研究生,研究方向为稀土永磁电机分析设计。
E-mail:chendong1207@163.com
