SOLIDWORKS Simulation机构运动仿真在驱动马达选型中的应用
2017-01-03撰文达索析统上海信息技术有限公司彭军
撰文/达索析统(上海)信息技术有限公司 彭军
SOLIDWORKS Simulation机构运动仿真在驱动马达选型中的应用
撰文/达索析统(上海)信息技术有限公司 彭军
自动化装备通常会采用马达(电机)驱动机构运动,进行输送、装配和包装等操作动作例如生产线。马达选型通常需要考虑多个因素,其中扭矩特性是一个重要指标。本文阐述了如何在SOLIDWORKS中进行多步骤机构运动分析,同时获取多个马达力矩的产品仿真和设计思路。
一、引言
自动化设备大量采用各种马达(电机)进行机构驱动,如何确定驱动力矩进而选择性能合适且价格经济的驱动马达是一个关键问题。相对于粗糙的经验估计和手工计算,机构运动仿真软件可以精确计算驱动力矩,进而与马达扭矩匹配,选择型号最合适的驱动马达。本文针对一款工业自动化包装设备,使用SOLIDWORKS Motion的机构运动仿真来计算马达力矩,将计算结果作为驱动马达选型的参考。
二、问题及模型描述
该包装设备在一个工作循环中会将传送带A上的四个包装袋运送到传送带B上的包装箱内,工作频率是每分钟二十个工作循环。在运动机构上布置有三个旋转马达驱动设备转,如图1所示。该设备框架材料是普通钢材,所有运动部件材料是6063铝合金材料。
由于本次计算目的是得到设备马达布置处的马达力矩,因此进行两次机构运动分析。在第一个机构运动仿真中设置运动机构抓手处的路径配合,在三个马达处设置铰链(Hinge)配合。通过机构运动仿真,反向计算得到三个铰链配合处的旋转角速度曲线,并导出成.csv文件,作为下一个机构运动仿真算例的马达参数的输入文件。
在第二个机构运动仿真算例中,压缩前述算例中的路径配合,在三个Hinge配合处设置三个旋转马达。马达参数输入前面计算得到的马达角速度曲线,然后计算得到三个马达的约束反力矩。

图1 包装设备
三、机构运动仿真过程
第一个机构运动仿真算例,在图1所示的三个马达处各设置一个铰链配合(Hinge),该配合允许绕圆柱面轴向的旋转运动,约束其他的运动自由度。设置铰链配合的目的在于输出运动所需要的角速度曲线,如图2所示。
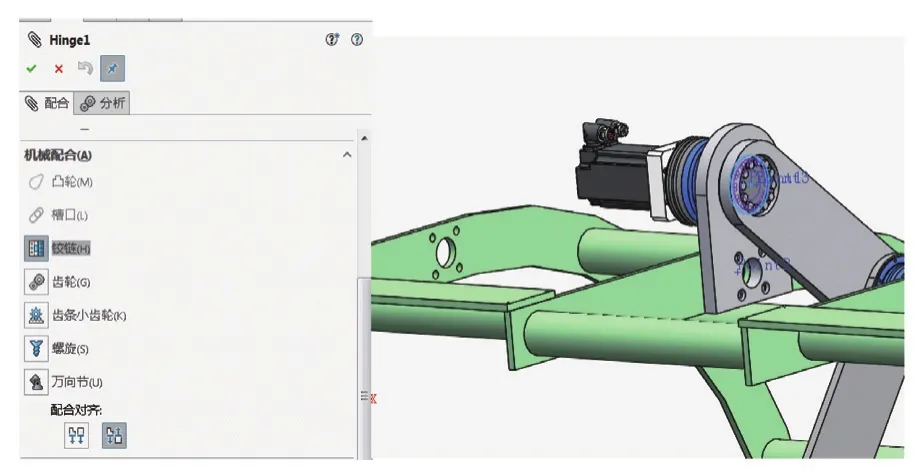
图2 马达布置处铰链配合
SOLIDWORKS机构运动仿真模块Motion中建立运动仿真分析步,建立如图3所示的路径配合马达。路径曲线可以使用SOLIDWORKS中的3D草图来建立。
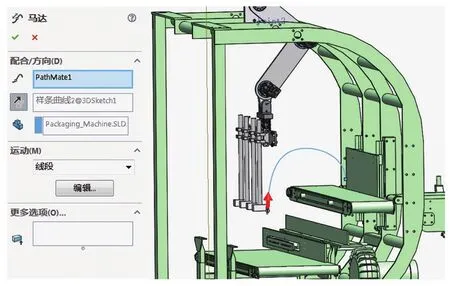
图3 路径配合马达
对该路径配合马达的运动参数进行设置,在运动(M)项下面选择线段,并编辑(图3)。设置位移路径,时间0~1秒,设置位移值1,对应曲线类型为3-4-5多项式(3-4-5 Polynomial);时间1~2秒,设置位移值0,对应曲线类型为3-4-5多项式(3-4-5 Polynomial)。该设置表示2秒时间为一个运动工作循环,时间点0秒开始沿路径运动,时间点2秒返回到初始位置点。3-4-5多项式描述了位移值y与自变量x的曲线关系,自变量中含有三次方、四次方和五次方项,设置多项式曲线的目的是确保位移运动曲线在各阶段能平滑过度。
在图4中还可以看到,SOLIDWORKS自动生成了该位移多项式曲线对应的速度曲线、加速度曲线等。

图4 路径配合马达参数设置
在运动算例属性处设置计算的每秒帧数为200,如图5所示。该运动仿真时间设置为2秒,进行运动仿真计算。

图5 运动算例属性设置
主要的结果输出项如图6所示,分别输出三个铰链处的旋转角速度曲线,并另存为csv文本文件,取名motor1. csv(图7)。

图6 铰链处结果输出

图7 铰链处角速度曲线
第二个机构运动仿真算例,将第一个机构运动仿真算例复制成一个新的Motion运动仿真算例。压缩路径配合马达,在三个铰链配合处的圆柱面上设置旋转马达,在马达参数设置中的运动(M)处选择数据点,如图8所示。

图8 旋转马达设置
插值类型选择立方样条曲线,点击输入数据,将第一个机构运动仿真算例计算得到的三个铰链处的角速度曲线导入,如图9所示。计算帧数等参数设置与第一个算例相同,运行该运动仿真。
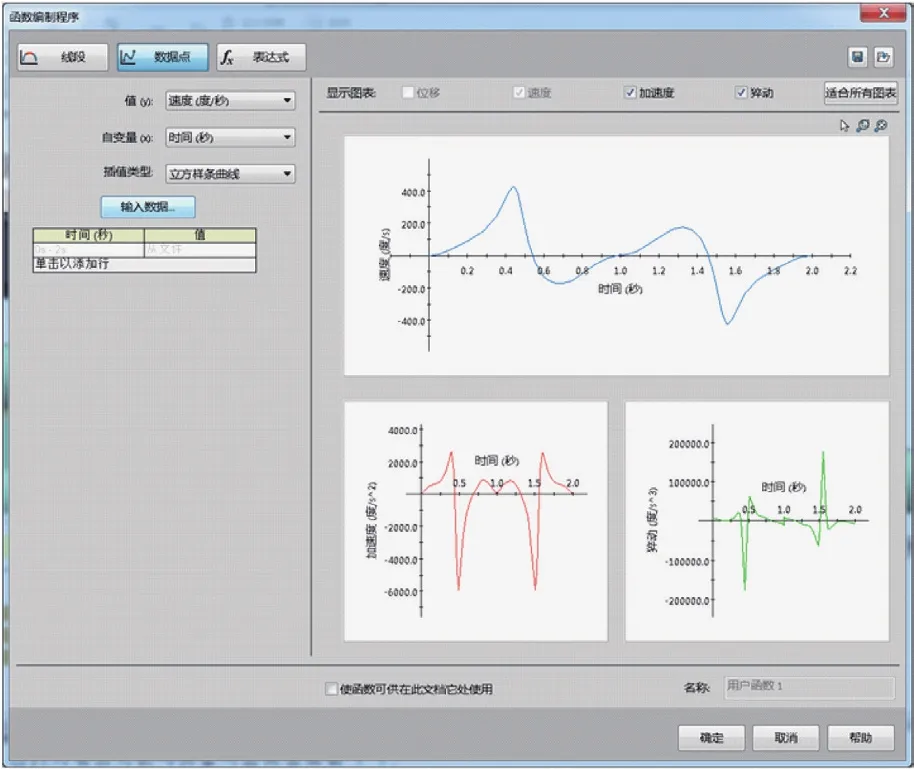
图9 旋转马达参数
四、结果输出
从第二个机构运动仿真算例的结果曲线Motor1的马达力矩(图10)可以看到,该设备在0.4秒、0.5秒、0.85秒和1.0秒处出现峰值力矩。
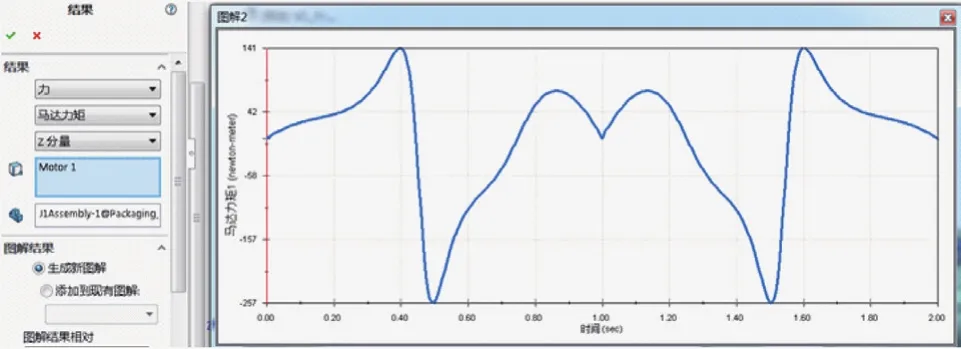
图10 Motor1的马达力矩曲线
五、结语
SOLIDWORKS Simulation中的机构运动仿真模块Motion可以帮助设计工程师精确计算设备机构运动的驱动力矩,作为马达选型的参考。Motion中计算得到的位移运动、连接力等数据结果也可以作为设备零部件结构强度刚度有限元仿真的输入数据,同时Motion也可以与ROCKWELL的Motion Analyzer等软件一起进行机电一体化的机构运动协同仿真分析,功能非常强大,非常适合自动化设备行业的设计人员使用。
