单向三角高程测量在大坝变形监测中的应用
2016-12-29杨敏
杨 敏
(1.国家测绘地理信息局 重庆测绘院,重庆 400015)
单向三角高程测量在大坝变形监测中的应用
杨 敏1
(1.国家测绘地理信息局 重庆测绘院,重庆 400015)
简述了单向三角高程测量原理,通过相关项目的应用论述了单向三角高程测量的可行性,再利用项目实例,论证了利用高精度的测量仪器通过单向三角高程测量进行大坝垂直变形监测是成功的。该方法减轻了常规的水准测量或静力水准测量的劳动强度,节约了成本,提高劳动效率,可作为后期项目的借鉴。
单向三角高程;高精度;垂直变形监测
在经济迅速发展的今天,能源需求量日益增加,水能的大规模开发和利用势在必行,合理地利用水利资源也是我国实现可持续发展的重要一步。而在这一步中,大坝又起着举足轻重的作用。由于大坝的技术要求高,变形细微,若不重视便可能发生溃坝事故,造成巨大的经济损失。目前常用的垂直位移监测方法有几何水准测量法[1]、流体静力水准法[1]、GPS高程拟合法[2]和三角高程测量法。本文着重论述单向三角高程测量法在变形监测中的应用,其他方法就不赘述。
1 单向三角高程测量法
三角高程测量的基本原理[3]如图1,A、B为地面上两点,自A点观测B点的竖直角为α1,2,S0为两点间水平距离,i1为A点仪器高,v2为B点觇标高,则A、B两点间高差为:

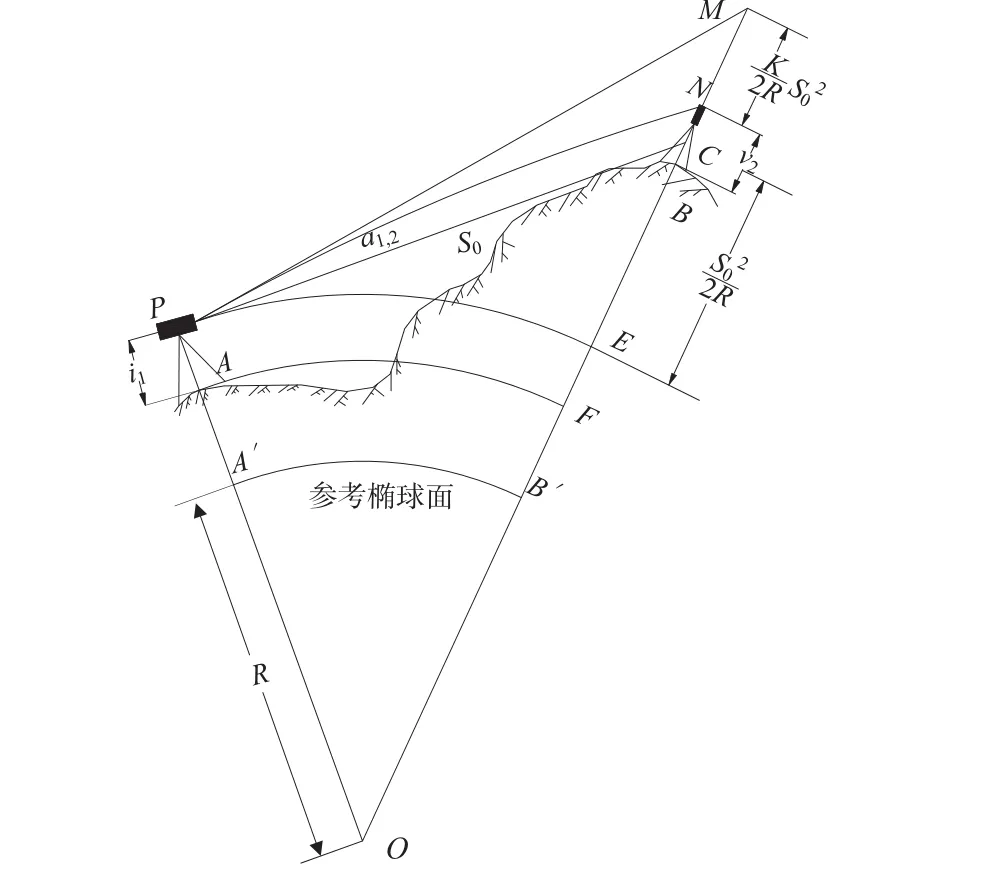
图1 三角高程原理图
式(1)是假设地球表面为一平面,观测视线为直线条件推导出来的。在大地测量中,当两点距离大于300 m时,应考虑地球曲率和大气折光对高差的影响,为了提高三角高程测量的精度,通常采取对向观测方法,求两点间高差,以减弱大气垂直折光的影响,在单向三角高程测量时,其公式为:

式中,C为球气差常数。
三角高程测量因其测量原理,在一定程度上不受地形条件的限制,尤其在地形复杂,很难架设仪器的地方,只要能让两点直接通视,控制两高差点的距离,严格按照规范加上球气差改正就能达到较高精度。
由于三角高程测量在变形监测中有相当的优势,因此小浪底工程外部变形监测[4]、琅琊山抽水蓄能电站大坝[5]、溪洛渡电站变形监测[6]等项目中均利用高精度的测量仪器,采用单向三角高程测量进行变形监测,均满足规范要求。
2 单向三角高程测量监测实例
某水利枢纽是长江上游的一个大型开发梯级项目,其大坝是目前世界上唯一一座坝高超过200 m的面板堆石坝。项目建成后为保证大坝的安全运行,需对坝体上设置的不同高程面上的4排共51个变形监测点进行周期性的观测。由于该坝体处于地势低洼地带,利用GPS进行变形监测,观测卫星数较少,精度无法保证。施工方在监测时使用常规水准进行坝体监测,效率低、劳动强度大、投入人力多,项目移交后大坝管理方想尝试用一种经济、便捷、效率高的方式来替代常规水准,通过查阅有关文献[7]得知:测边精度为1 mm+1×10-6×D,测角精度为0.5"的全站仪,监测点的三维点位精度、平面精度和高程精度在2 000 m测距范围内均能满足mm级精度要求。该大坝监测点到基准点最长边约为760 m,最短边约为350 m,因此采用高精度的全站仪来进行监测,并对比监测效果。
采用TCA2003仪器,其测边精度为1 mm+1×10-6× D,测角精度为0.5",利用单向三角高程测量,分别在2 个参考点上架设仪器对坝体上的监测点进行了5期变形监测,获得坝体上的所有监测点高程值,并进行球气差改正,最终对两站的高程值求平均值。由于篇幅所限,本文只列举坝体最上面的SA2高程面(共7点)和SA3高程面(共10点)的监测数据。利用各期的高程值分别与第1期的高程值求差,得出各高程点的变形量,如表1、表2所示。SA3高程面上监测点垂直沉降曲线如图2所示。SA2高程面上监测点垂直沉降曲线如图3所示。
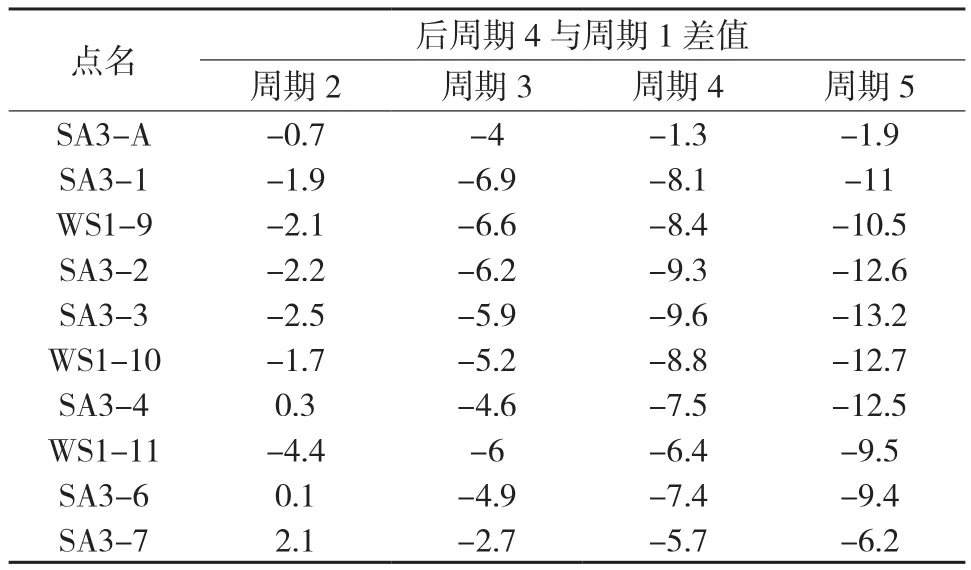
表1 SA3高程面监测点各期高程值与1期高程值的较差表/ mm
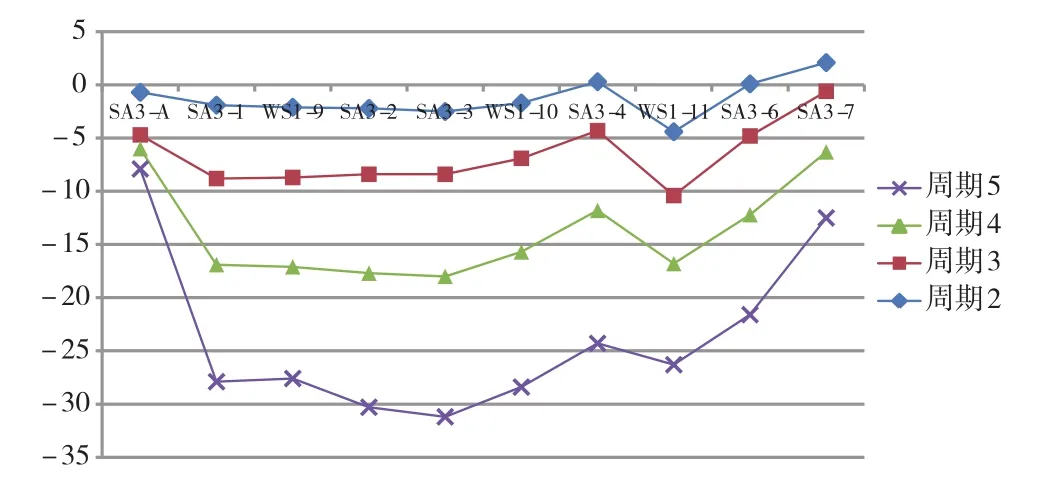
图2 SA3高程面上监测点各期沉降曲线图

表2 SA2高程面监测点各期高程值与1期高程值的较差表/ mm
由SA2和SA3两个高程面的沉降曲线图可知,大坝在观测期间一直在发生沉降,其中位于大坝两侧的点沉降量相对较小,比较稳定;位于大坝中间的点沉降量比较大,尤其以最顶层SA2高程面上的监测点最为突出,其沉降量反映了大坝沉降的总量。通过对各监测点的高程值求中误差,得到本次变形监测点的高程中误差为±1.6 mm,其观测值与前期水准观测值的最大较差为-2.5 mm,最小较差为+0.5 mm,满足管理方要求的变形监测点测量精度不大于2 mm的要求。
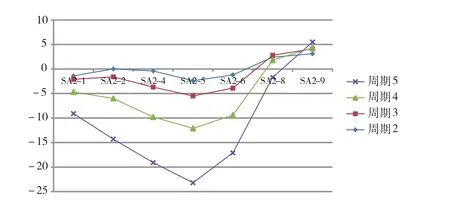
图3 SA2高程面上监测点各期沉降曲线图
3 结 语
从项目数据可以证实,利用单向三角高程监测大坝垂直变形是成功的。但在利用单向三角高程测量进行变形监测时需注意以下几点:
①必须采用高精度的全站仪,尤其对于监测点相对较多的项目,这样既能提高作业效率,也能减轻劳动强度。②可根据测站到监测点的距离设置多个工作基站,每个工作基站的距离尽量不超过600 m,垂直角不大于30°[8]。③为确保成果的可靠性,防止工作基点整体移动,需定期观测基准网,但周期可稍长(一季度或0.5 a联测一次)。④在监测时,应同时记录工作基站附近的温度和气压,最好使用干湿温度计。要选择空气相对稳定的时间段进行观测,在太阳升起和落山的1 h内不要观测,此时大气的垂直折光变化剧烈,会影响观测精度。⑤为提高三角高程测量的精度和核检测量结果,在有条件的监测点处,可联测部分高精度或等精度的水准数据。
[1] 袁天奇,张冰.大坝外部变形监测技术现状与发展趋势[J].水力发电,2003(6):52-55
[2] 郏红伟. GPS水准测量应用探讨[J].测绘通报,2005(8)∶34-38
[3] 孔祥元,郭际明. 控制测量学[M].武汉:武汉大学出版社,2006
[4] 刘朋俊,丁万庆,张荣林. TCA2003在小浪底工程外部变形监测系统中的应用研究[J].广西水利水电,2003(2)∶3-7
[5] 孙景领,黄腾,邓标.TCA2003全站仪自动识别系统ATR的实测三维精度分析[J].测绘工程,2007,16(3):48-51
[6] 李双平,方涛,王当强.测量机器人在溪洛渡电站变形监测网中的应用[J].人民长江,2007,38(17)∶54-56
[7] 梅文胜,张正禄,郭际明,等. 测量机器人变形监测系统软件研究[J].武汉大学学报∶信息科学版,2002(2)∶24-26
[8] 张正禄,邓勇,罗长林,等.精密三角高程代替一等水准测量的研究[J].武汉大学学报∶信息科学版,2006(1)∶5-8
P258
B
1672-4623(2016)01-0097-02
10.3969/j.issn.1672-4623.2016.01.029
杨敏,硕士,工程师,主要从事工程测量、大地测量、数据分析和处理以及相关方面的科研和生产工作。
2015-04-22。