电子罗盘的GPS检定场校准方法
2016-12-29彭友志刘正华
彭友志,刘正华,叶 静
(1.中国地震局地震研究所 地震大地测量重点实验室,湖北 武汉 430071;2.中建三局集团有限公司建筑设计院,湖北 武汉 430035)
电子罗盘的GPS检定场校准方法
彭友志1,刘正华1,叶 静2
(1.中国地震局地震研究所 地震大地测量重点实验室,湖北 武汉 430071;2.中建三局集团有限公司建筑设计院,湖北 武汉 430035)

主要研究了如何利用GPS检定场测量方位角的来校准电子罗盘。将WGS84空间直角坐标转换成站心坐标的模型,利用模型计算检定场两点的方位角。介绍了GPS电子罗盘校准方法,并进行了不确定度分析,最后给出算例验证方法的正确性。
方位角;GPS电子罗盘;校准
1 GPS电子罗盘定向原理
GPS电子罗盘已经广泛应用于航海、航天的姿态测量和导航等工作,其原理如图1所示。GPS罗盘采用2个GPS天线构成一个基线矢量B12,基线两端的天线分别接收到的多颗同一卫星的GPS载波信号,求取2个天线的瞬时相位差,由载波相位的双差观测方程,解算出整周模糊度,则可以用最小二乘法解算出基线矢量B12(WGS84坐标),从而可以得到GPS罗盘的方位角。虽然电子罗盘中GPS测点坐标的精度很低,坐标的精度是3 m左右(利用广域差分能到m级精度),但是坐标差的精度能到cm级,这样电子罗盘的定向精度能达到15'左右,0.36 m左右的电子罗盘测姿精度能到0.5°[1-4]。
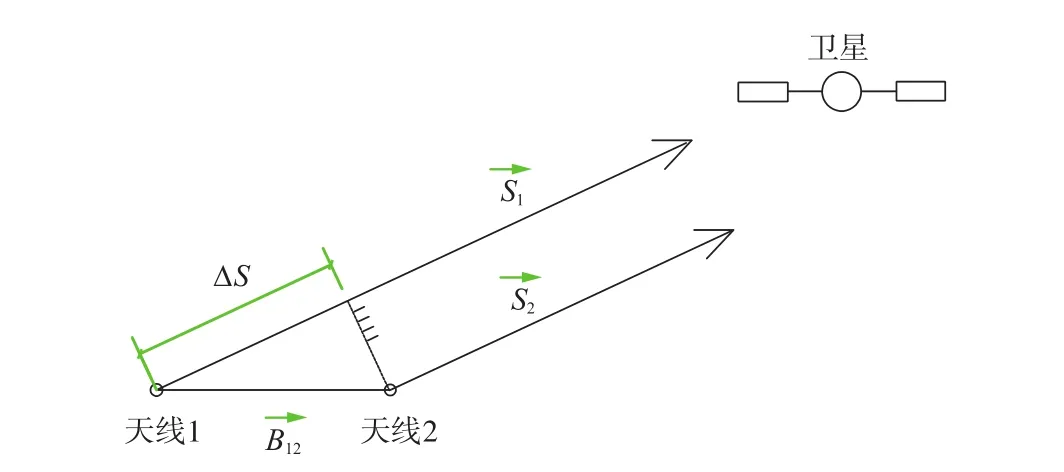
图1 GPS罗盘定向原理
GPS子午线方位角在工程测量中已经广泛应用[2],但目前还没有专门的校准规范给出校准方法。在航海中,通常通过子午线方位角来进行导航。GPS检定场只有点位的WGS84坐标和基线值,WGS84坐标是地心坐标系,而子午线方位角是采用站心坐标系,需要先将基线场的WGS84空间直角坐标转换成站心坐标的模型。
2 基于GPS的子午线方位角规算模型
如图2所示,P、Q两点的坐标差由GPS测得,要计算基线PQ的方位角,只要把Q点的坐标转化成以P为原点的站心坐标即可。
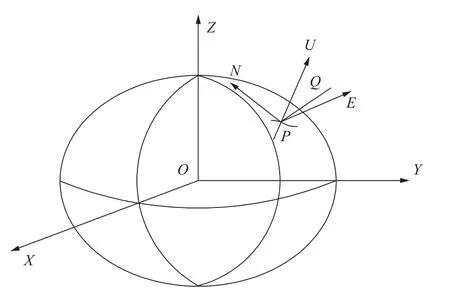
图2 站心坐标系和空间直角坐标系的转换模型
以测站P所在坐标系为站心坐标系,记为P-NEU。首先将P-NEU坐标轴的E轴反向,得到E'。设P点的大地经纬度为B、L,绕E'轴旋转(90°-B),最后再绕Z1轴旋转(180°-L),即可得到:
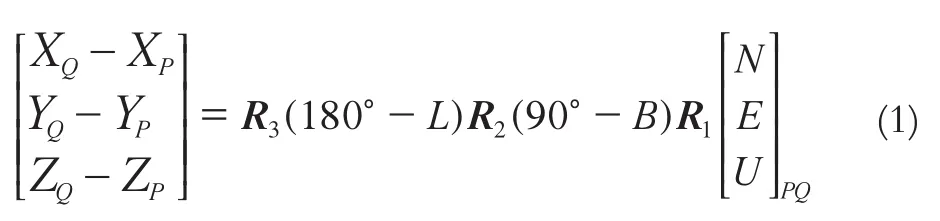
其中,
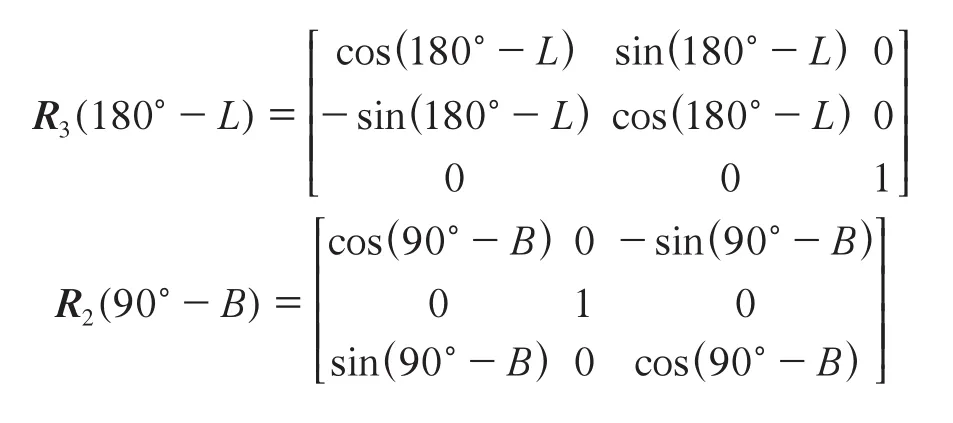
则有,
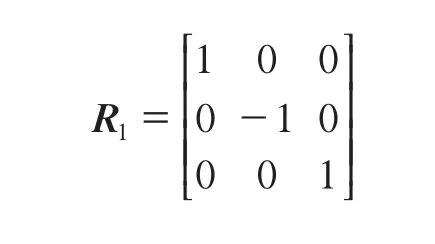
由此可知,根据两点的WGS84坐标,已知P、Q两点的空间坐标的坐标差以及P点的大地坐标,可求得点Q在P点处站心地平坐标系中的坐标(N,E,U)[5,6]。
P点至Q点的方位角为:

利用误差传播定理可以得到坐标(N,E,U)的协方差阵。
对式(3)线性化:

再根据误差传播定理,即可得到方位角θ的方差阵Dθ。
3 校准方法
在GPS校准场选定2个相距24 m左右的观测墩,在观测墩之间用脚架架设起GPS电子罗盘,在观测墩1上架设高精度全站仪,精确整平后照准观测墩2上的觇牌中心,再微调电子罗盘的架设位置,使觇牌中心、电子罗盘中心指向标志在一条直线上,记录下电子罗盘的定向角度值N1;再将电子罗盘旋转180°,再次微调电子罗盘的架设位置,使棱镜中心、电子罗盘中心指向标志在一条直线上,记录下电子罗盘的定向角度值N2。将观测的角度值与GPS校准场归算后的子午线方位角比较,即可得到GPS电子罗盘指向校准值。
特别需要注意的是,GPS电子罗盘的方位角是以两个GPS天线中的一个为站心计算的,而本方法校准是以两个观测墩其中一个为站心计算的,但是由于两个观测墩和电子罗盘相距很近,高差也不大,所以方位角的偏心误差很小,可以忽略不计。
4 校准计算实例
4.1 方位角计算
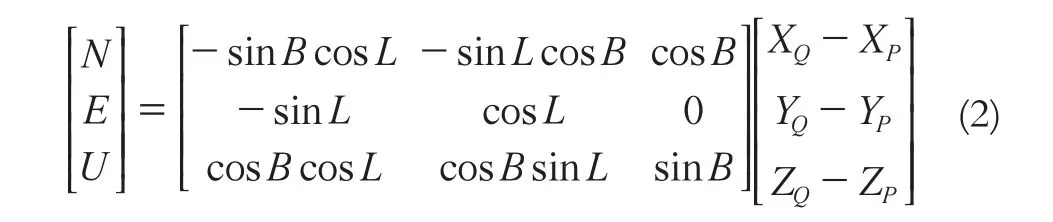
给定C、D两点的GPS坐标,以及C点的大地坐标。利用式(2)求解D点在C点处站心地平坐标系中的坐标(N,E,U),再利用式(3)求解C点至D点的方位角(表1、表2)。
表1 已知点的空间坐标 /m
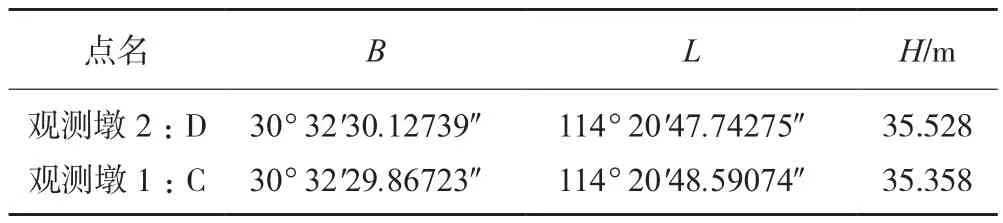
表2 已知点的大地坐标求解出的方位角
4.2 精度评定
根据GPS数据处理软件,可以获得两点坐标差的协方差阵,再利用误差传播定理得到坐标(N,E,U)的协方差阵,根据式(4),利用误差传播定理,得到方位角的中误差,本算例所得方位角的中误差约为±30.5"(计算过程如文献[7])。
5 不确定度分析
GPS检定场校准电子罗盘时的不确定度来源主要有:
1)由GPS检定场校准时带来的计算方位角的不确定度影响u1=30.5",本算例中,以贝塞尔公式算得A类不确定度和中误差一致,约为30.5";
2)全站仪的横轴误差带来的放线不确定度影响,取2"的全站仪横轴误差的限差u2=15";
3)全站仪的强制对中带来架设不确定度影响0.5 mm,归化成角度约为u3=4.3";
4)全站仪照准定向目标带来的不确定度影响0.5 mm,归化成角度约为u4=4.3";
5)电子罗盘的安置不确定度影响1.0 mm,归化成角度约为u5=8.6";
6)电子罗盘的定线误差不确定度影响1.0 mm,归化成角度约为u6=8.6"。
此外,由于站心偏心所带来的方位角偏差,由于距离很短,忽略不计。所以GPS检定场校准电子罗盘时的不确定度为:

式中各项的不确定度并不相关,可取c1=c2=c3=c4=c5=c6=1。
GPS检定场校准电子罗盘合成不确定度为:

取k=2时,GPS检定场校准电子罗盘的扩展不确定度为:
P228.4
B
1672-4623(2016)01-0069-02
10.3969/j.issn.1672-4623.2016.01.020
2015-01-30。
项目来源:中国地震局地震研究所所长基金资助项目(6103);国家计量检定规程《全球定位系统(GPS)接收机(测地型和导航型)检定规程》编写组实验基金资助项目。