基于PID控制风板装置的设计与实现
2016-12-29张扬
张 扬
(山西职业技术学院 电气工程与自动化系,太原 030006)
基于PID控制风板装置的设计与实现
张 扬
(山西职业技术学院 电气工程与自动化系,太原 030006)
介绍了以STC89C52单片机作为系统控制核心,采用角度传感器(WDD351)实时检测帆板的偏移角度,通过单片机程序的PID控制算法处理PWM控制信号,继而调节风扇的送风量使帆板达到要求角度。算法有别于常见的控制系统,其采用的PID控制算法不要求确定受控对象的精确数学模型,而根据控制规则组织控制决策表,由控制决策表决定控制量的大小。解决了PID在面对被控对象存在三角函数数学模型时的控制问题,较好的完成了比赛要求,取得了良好的产品效果。
单片机; 角度传感器;PID
2015年全国大学生电子设计竞赛高职组控制类题目——风板控制装置,首次在竞赛题目中加入了算法的内容。对于高职学生来说还是有一定的难度,通过三天的努力取得较好的结果。根据题目制作要求如图1所示的风板控制装置。

图1 风板控制装置示意图
Fig.1 Wind board schematic control means
风板在预置角度(45°~135°)之内完成任务要求。基本任务:(1)设定一个角度值后由起点开始启动,控制风板到达指定角度停留5 s,动作完成后平稳停留终点位置。(2)设定两个角度值,由终点启动到达指定角度后再预置角度之间做摆动,动作完成后平稳停留起点。(3)状态转变时有明显声光提示。发挥部分中用长尾金属夹栓一个重量10g砝码作为添加条件,再次实现基本任务中的动作要求,但过渡阶段时间、摆动次数、误差角度值有所变化。
1 系统设计方案
本系统核心采用STC89C52DIP40芯片单片机,执行机构以L298驱动模块驱动风机,利用WDD35D1角度传感器测角度、电机驱动(PWM)技术结合PID算法实现帆板的转角测试,借用控制器单元、LCD液晶显示、按键模块、声光提示系统等功能为其服务。为了满足帆风机控制装置控制系统的设计要求,进行了各单元模块的比较论证及确定,在满足设计系统优良下,全方面性本着硬件线路简单,充分发挥软件编程方便灵活的特点。系统方案[4]框图如2所示:

图2 系统方案结构框图
Fig.2 A block diagram of system solutions
2 硬件电路设计
系统的硬件设计是按照题目的特定要求,由单片机、电机驱动模块、采集模块、AD 转换模块、按键模块、显示模块、声光提示等模块组成的。受篇幅所限,将硬件电路重点说明两点:一是12 V1.5 A风机控制器设计,二是角度传感器的数据采集电路。
风机驱动电路。
1)按照系统设计对风力的需求,经实验后选择12 V1.5 A大功率轴流风机,对应的采用L298驱动芯片46 V4 A,该芯片为双路全桥式驱动,可驱动两台直流电机。电路如图3所示。
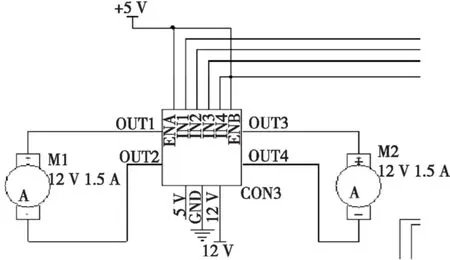
图3 风机驱动电路图
Fig.3 Fan drive circuit diagram
2)数据采集模块。根据系统方案设计,利用WDD35D1角度传感器检测风板角度位置,它采用材料聚合物材料,物理性质半导体材料晶体结构,导电塑料输出模拟型信号,所以需要通过DA转换,如图4所示。
设计采用TLC2543模数转换芯片,串行通信接口,具有输入通道多、性价比高、易于和单片机接口的特点,可广泛应用于各种数据采集系统。经tlc2543模块编译后,反馈单片机,由L298电机驱动模块控制吹风量的大小,从而实现风板的闭环控制。
3 软件设计
风板控制装制要求系统控制风机的风量,以实现运动控制,这给软件设计带来了更高的要求。为此在软件设计中,引入了PID调节单片机输出的PWM信号控制风机转速的快慢,通过角度传感器的反馈信号,动态计算风机PWM值。PWM即脉宽调制,是英文“Pulse Width Mdulation” 的缩写。利用微处理器的数字输出对模拟电路进行控制的一种非常有效的技术,通过改变直流风机电枢上“占空比”(一个周期内“接通”和“断开”时间的长短)来达到改变平均电压大小的目的,从而控制电动机的转速,也正是因为如此PWM又被称为“开关驱动装置”。如图5所示,给出了本次设计的主要软件设计流程。
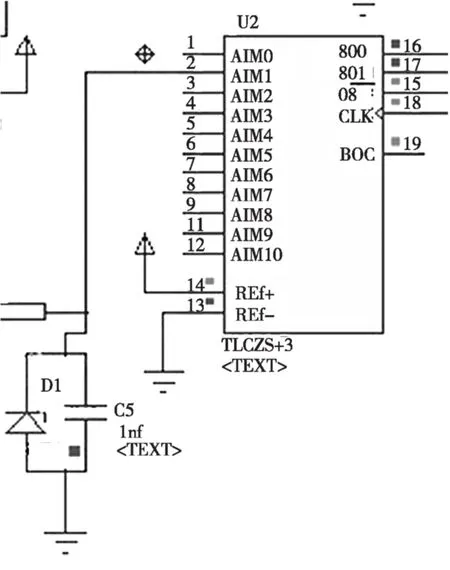
图4 D/A驱动电路图
Fig.4 D/A drive circuit diagram
3.1 软件设计需求与PID算法分析
本系统设计之初将传统PID控制引入,算法设计比较简单,由于对控制过程中,被控对象的受力分析不细致,实验呈现PID响应速度不满足控制要求的问题。经过实验发现,风板在不同角度时的受力情况如图6所示。
重力、机械摩擦和风力存在三角函数关系。如下力矩方程所示:

F: 风板受到的吹力矩;
G:风板的重力;
f: 转轴所受摩擦力;
θ: 风板旋转的角度;
∂:方向与竖直方向的夹角;
D:轴半径;
l:风板长度。
故此,在180°范围内,受系统硬件结构和风板受力变化等方面的影响,通过模糊控制器[1]对响应曲线进行粗调,PID控制器对响应曲线进行微调,并且模糊控制器对风板的角度进行了范围预估,再由传统PID控制器进行调节,解决了重力、机械摩擦和风力存在三角函数关系导致PID响应慢的问题。为此,设计引入了模糊控制理念[2],以模糊控制器判断风板受力角度变化范围,以传统PID调节风板转动精度,采用开关式模糊PID控制器[3],引入不完全微分型PID算法进行了软件设计。

图 5 软件设计流程图
Fig.5 Software design flow

图6 受力分析图
Fig.6 Stress Analysis diagram
4 结 论
通过比赛结果的验证,可以得出以下结论:风板在±45~60°角之间重力矩较大,需要的风力矩随之较大;±60~80°角之间重力矩较小,需要的风力矩也较小,但是机械摩擦力增大;80~110°角之间重力矩可忽略,此时仅存在摩擦力与风力之间的关系。综上所述,风板在45~135°之间,受力的变化呈时变性、非线性和不确定性。经试验验证,基于模糊控制的PID控制器,完成了题目所有要求,误差偏离值小,系统运行稳定、迅速、可靠,获得山西赛区二等奖,体现了“满足项目要求,性能保证长期稳定,性价比高”的设计理念,但由于时间相对较短,本文的系统设计需要大量的状态参数进行测试,所以个别角度的控制精度还有待提高。
[1] 陈云泽,乔建华.自适应模糊PID轧机液压AGC系统特性研究[J].太原科技大学学报,2015,36(3):10-12.
[2] 潘岱,张红梅,刘艳丽.基于MATLAB平台的自动控制理论辅助教学改革探索 [J].通讯世界, 2015(20):29-32.
[3] 王鸣.基于模糊控制理论的一种PID参数自整定控制器的设计与仿真[J].自动化与仪器仪表,2000,18(1):14-17.
[4] 李明杰,赵志诚,桑海.单级倒立摆的分数阶PIλDμ控制器设计[J].太原科技大学学报,2014,35(1):23-24.
PID Control Deflector Means of Design and Implementation
ZHANG Yang
(Department of Electrical Engineering and Automation, Shanxi Vocational and Technical College, Taiyuan 030006, China)
This 2015 National Undergraduate Electronic Design Contest Control Class Title - wind deflector control system design device introduces the STC89C52 microcontroller as the core control system by using the angle sensor (WDD351) real-time detection windsurfing offset angle through the microcontroller program PID control algorithm processing PWM control signal, and then adjusting the air supply fan makes windsurfing to meet the requirements angle. Algorithm is different from the common control system, which uses PID control algorithm that is not required to determine the precise mathematical model of controlled object, according to the rules of the organization controlling control decision tables, the control decision table determines the amount of control the size. PID control solved the problem in the face of trigonometric mathematical model of controlled object so as to better complete the competition requirements, and the product achieved good results.
microcontroller, angle sensor, PID
1673-2057(2016)06-0443-04
2016-01-22
张扬(1983-),讲师,硕士研究生,产要研究方向为可编程控制器的开发与应用。
TP237
A
10.3969/j.issn.1673-2057.2016.06.005