基于稀疏点云的ADAS三维地图构建方法
2016-12-27胡庆武
姚 远,王 玥*,胡庆武
(1.武汉大学 遥感信息工程学院,湖北 武汉 430079)
基于稀疏点云的ADAS三维地图构建方法
姚 远1,王 玥1*,胡庆武1
(1.武汉大学 遥感信息工程学院,湖北 武汉 430079)
提出了一种基于机载LiDAR稀疏点云与已有道路二维导航地图快速构建ADAS三维地图的方法。通过稀疏点云与导航地图拓扑叠加分析和三维空间关系检验,实现了对复杂道路结构的高程平滑和面向ADAS的道路三维地图构建。以香港地区ADAS地图为例,采用该方法进行了三维地图构建。结果表明,该方法合理且效率高,精度满足先进自动驾驶三维地图要求。
ADAS;机载LiDAR;三维地图;高程平滑
谷歌的智能驾驶是基于导航技术的,它结合地图数据、GPS数据以及在行驶过程中对周围环境的探测来决定如何行驶[1]。精确的地图数据在智能驾驶的实现中非常重要,利用地图数据可预知前方道路状况以决定是否需要增减油门[2],并可在高程约束下选择最优路径。地图数据作为一种新的传感器,在ADAS中应用广泛,LI Kang[3]等提出实时构建道路曲率以支持ADAS应用的思路;Thomas B[4]等构建了一种实时更新与测试ADAS地图的方法;LU Meng[5]等研究了在ADAS的使用中如何利用地图有效减少交通事故的发生;李德毅[6]提出的智能驾驶需要高精度三维导航地图,但现存导航地图多以二维为主,缺少高程信息,实用性不强。
近年来,机载LiDAR作为精确、快速获取三维数据的技术正得到广泛认同[7]。通过高速激光扫描测量的方法,大面积快速获取被测对象表面的三维坐标数据,可快速采集城市三维信息[8]。LiDAR点云的存在为利用现存的二维导航地图生成三维地图提供了可能。本文提出一种基于机载LiDAR稀疏点云和已有道路二维导航地图来快速构建ADAS三维地图的方法。
1 算法框架
本文基于LiDAR稀疏点云的ADAS三维地图构建在统一的地理参考下,通过稀疏点云与导航地图平面拓扑叠加分析和三维空间关系检验,将稀疏点云的高程信息无缝平滑地转移到二维导航地图上,以此实现导航地图中道路的三维构建,如图1所示。
实现ADAS三维地图构建的关键是稀疏点云高程数据到道路对象的准确转换[9]。一方面,稀疏点云来自机载LiDAR扫描,点云数据含有粗差;另一方面,点云密度与道路对象分割不匹配,在同一路段内道路点云高程存在变化,如图2所示,路段1、2内的点云存在高程差异,路段1和路段2结合处点云也存在高程差异,还有部分点云在路段的边界附近,这些都给基于LiDAR稀疏点云的道路高程赋值带来困难。因此,需要对稀疏点云粗差进行预处理,并通过空间一致性检验来解决点云到道路对象的合理赋值。因此,本文设计的算法流程为:首先对点云数据进行预处理并构建格网;然后将构网的数据和二维导航地图数据叠加赋予高程信息生成三维导航数据;再对生成的三维导航数据进行平滑处理并进行一致性检验,最后得到符合要求的三维导航地图(图3)。
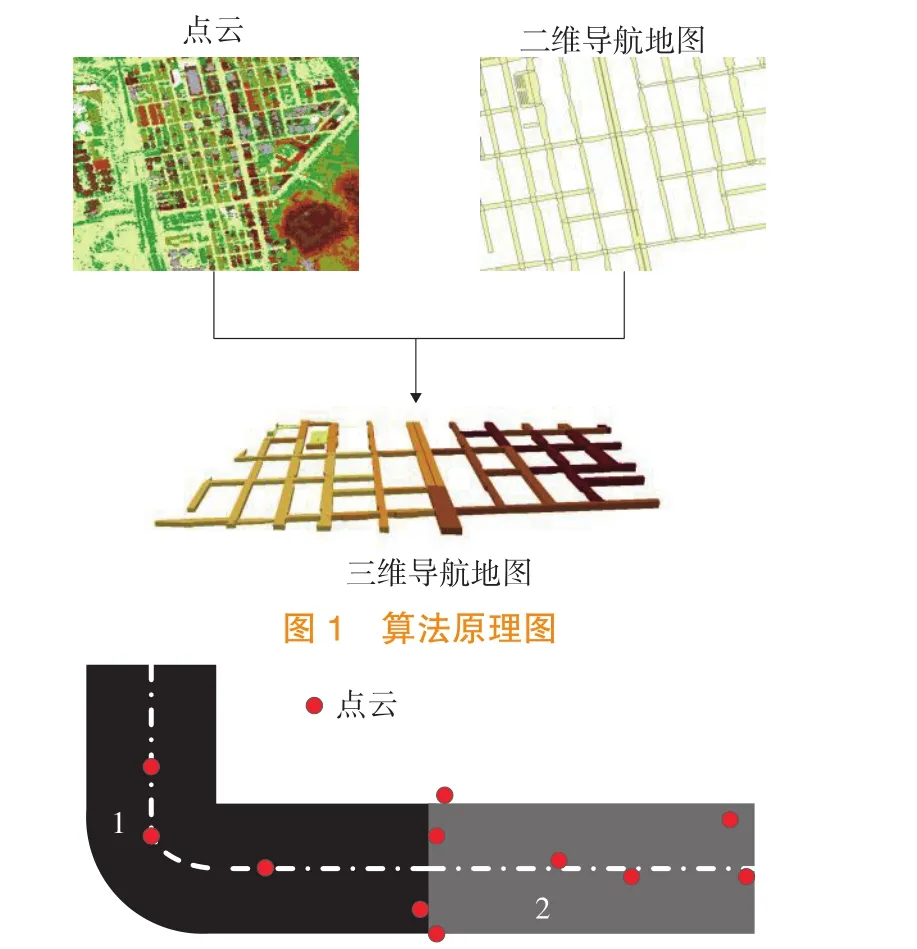
图2 点云与道路对象匹配问题
2 ADAS三维地图构建算法
基于稀疏点云和二维导航地图叠置构建三维地图的方法包括点云数据预处理、二维导航地图叠置分析、高程平滑和空间关系校验等。点云数据预处理包括点云数据的坐标转换、不同航带点云的拼接和点云粗差过滤,以减少点云在后续叠置分析中对精度的影响。

图 3 算法流程
2.1 二维导航地图叠置分析
利用点云数据和二维导航地图数据构建三维导航地图需要将二者进行叠加分析。然而,机载点云的数据量很大,直接进行叠加分析运算量大且耗时,寻找有效算法加快处理的速度很重要。本文根据高程赋值的特点将点云数据按照范围构建格网,再将格网和二维导航地图进行叠加分析,主要步骤如下:
1)稀疏点云格网构建。计算稀疏点云所有点所在的平面范围:(Xmin,Ymin)和(Xmax,Ymax),根据平面范围生成0.1×0.1的点云格网[10]。格网点的高程值取格网范围内所有点高程值的最小值hmin。
2)空间叠置。将点云格网与二维导航地图进行空间叠置分析。
3)高程赋值。对于二维导航地图上的点P(x,y),统计以此点为中心,10×10格网内所有点的高程值,将最小值Minh作为该点的高程值。
将分别采用直接叠置分析和构建格网后进行叠置分析的运行时间进行对比,结果如表1所示。可见,本文构建格网的叠置分析方法能够将点云和二维导航图叠置分析的效率提高1 000倍以上,解决了利用大数据量稀疏LiDAR点云构建三维导航地图的运算效率问题。

表1 不同叠置分析方法效率对比
2.2 高程平滑
通过稀疏点云与二维导航图直接叠置分析生成的三维导航地图中,每个点的高程值都是基于点云孤立生成的,没有考虑道路要素内部的拓扑一致性,因此存在高程突变和高程赋值错误,影响在ADAS中的使用。一种常见高程异常为高架桥道路,受制于点云密度和精度,道路面上的高程点存在部分是路面上LiDAR点云高程值,部分是桥梁下方点云高程值,以最小高程值作为道路面高程叠置赋值,会导致道路面高程错误[11]。因此,需通过道路内部的拓扑结构进行高程平滑,改正高程突变和高程赋值错误。本文采用二次曲面拟合进行高程平滑。
二次曲面方程为:

式中,(x,y)为平面坐标;f(x,y)为高程值。
道路要素内部所有点的高程值h1,h2,h3,…,hn中,若某一点高程值hk相对应的高程残差vk满足下列条件:

根据以上算法原理,本文采用基于二次曲面拟合进行高程异常点改正,实现高程平滑。
设三维导航数据中道路要素编号依次为(p1,p2,…,pn),n为道路要素的总个数,高程平滑步骤如下:
1)提取道路要素。取出第i个道路要素pi。
2)计算标准差。针对取出的道路要素pi,统计pi中所有点h1,h2,…,hm(m为点个数)的高程之和Sumh,根据点的个数求平均值,计算标准差的估计量σ。
3)找到异常数据。取出pi中点hk与3σ比较大小:大于此值,进入下一步;小于此值,跳过这个点,计算下个点。
4)高程异常值修改。根据异常值hk前后6个点的非零高程值,由式(1)拟合一个二次曲面函数。根据拟合的曲面函数计算异常点的高程值,存入数据中,返回3)。
5)中止。当k=m时道路要素pi平滑完成,道路要素内部过程中止;当i=n时所有道路要素高程平滑过程中止。
2.3 空间关系检验
二维导航地图在赋予高程信息并平滑后生成的三维导航地图需要检验生成精度是否满足要求。现场测量验证费力耗时,可根据三维导航数据的空间拓扑一致性和合理性进行校验。本文设计了2种空间关系校验方法。
2.3.1 导航地图要素内部检验
由于单一要素内部的高程变化不是很大,检验采用高程的均方差。对于每个要素,计算其高程值的均方差,如果均方差超过给定阈值,则内部检验不合格,此要素标记为错误。
2.3.2 导航地图要素之间检验
要素之间的检验采用邻接性。本文定义邻接性:相邻要素之间具有相同的平面坐标值时,高程值相同说明邻接性正常,反之则邻接性不正常。如图4所示,道路要素1的P1点和道路要素2的P2点满足:x1=x2,邻接性不正常,2个要素都标记为错误。
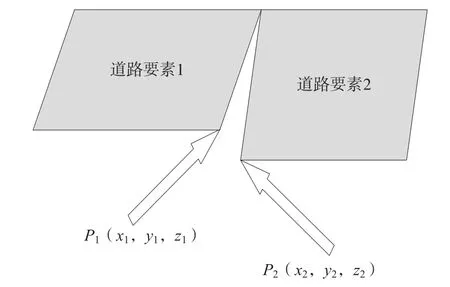
图 4 邻接性检验示例
3 实验及分析
本文采用香港油尖旺区(街区道路)和观塘区(高架桥道路)的三维ADAS导航地图来验证构建方法的有效性。道路部分分为机动车辆道路要素、交叉道路要素和分割车道要素。稀疏点云来自机载LiDAR,点云数据经过初步处理以及地面点和非地面点的分离,有效减少了点云高程赋值的工作量。

图5 实验数据集
如图5所示,实验数据中蓝色要素为ADAS二维导航地图,其他颜色要素为来自LiDAR地面点的稀疏点云。采用本文算法生成三维导航地图,结果如图6、 7所示,局部放大图为全局图红圈标注部分的放大图。无论是一般的道路街区还是高架桥区域,采用本文算法,都能得到较好的道路三维导航图,相邻的道路要素高程过渡自然平滑,无明显的高程阶跃。

图6 油尖旺区ADAS结果
为了进一步定量评价本文算法的有效性,对该方法生成的道路三维ADAS导航图进行空间关系检验,其结果如表2所示。2个实验数据集得到的三维道路ADAS导航图外部邻接性检验结果都在97%以上,说明三维导航地图相邻道路面高程过渡平滑,无明显阶跃;内部均方差在0.5 m以内的达到97%以上,说明道路路段内部高程赋值平稳,与实际道路情况相符,因此本文算法是有效的。

表2 三维ADAS导航图空间关系检验结果
4 结 语
本文提出利用机载激光点云数据结合二维导航地图生成三维导航地图的方法,通过稀疏点云与导航地图拓扑叠加分析和三维空间关系检验,实现面向ADAS的道路三维地图构建,为ADAS提供了基础三维道路信息,便于司机对道路状况的预判,进行最优路径规划和减少能源的消耗。香港地区ADAS地图构建结果表明,本文方法能有效解决利用已有数据生成三维导航地图的问题,可降低基于车载三维激光扫描移动测量系统制作ADAS三维导航图的工作量。需要进一步解决的是要素内部LiDAR点云密度不够时高程赋值精度的问题。
[1] Hillel A B, Lerner R, Levi D, et al. Recent Progress in Road and Lane Detection: a Survey[J].Machine Vision and Applications,2014,25(3):727-745[2] Etsion I, Sher E. Improving Fuel Efficiency with Laser Surface Textured Piston Rings[J].Tribology International,2009,42(4): 542-547
[3] LI K, TAN H, Misener J A, et al. Digital Map as a Virtual Sensor-dynamic Road Curve Reconstruction for a Curve Speed Assistant[J]. Vehicle System Dynamics,2008,46(12):1 141-1 158
[4] Thomas B, Lowenau J, Durekovic S, et al. Test Results and Validation of the Feed Map Framework with ADAS Applications[C]. International IEEE Conference on Intelligent Transportation Systems,Beijing, 2008
[5] LU M, Wevers K, WANG J. Implementation Road Map for In-vehicle Safety Systems in China[J].Transportation Research Record: Journal of the Transportation Research Board, 2010(2148):116-123
[6] 李德毅.大数据时代的位置服务[J]. 测绘科学, 2014(8): 3-6
[7] Manandhar D, Shibasaki R. Vehicle-borne Laser Mapping System(VLMS)-a New Observation System for 3D Mapping of Urban Areas[C].IEEE/ISPRS Joint Workshop on Remote Sensing and Data Fusion over Urban Areas, Rome,2001
[8] Grinstead B, Koschan A, Page D, et al. Vehicle-borne Scanning for Detailed 3D Terrain Model Generation[C]. Commercial Vehicle Engineering Congress and Exhibition, Chicago, 2005
[9] WANG J, Lawson G, SHEN Y. Automatic High-fidelity 3D Road Network Modeling Based on 2D GIS Data[J]. Advances in Engineering Software,2014,76: 86-98
[10] SHI W Z, LI B J, LI Q Q. A Method for Segmentation of Range Image Captured by Vehicle-borne Laser Scanning Based on the Density of Projected Points[J]. Acta Geodaetica Et Cartographic Sinica, 2005,34:95-100
[11] Cavegn, Stefan, Stephan Nebiker. Automated 3D Road Sign Mapping with Stereovision-based Mobile Mapping Exploiting Depth Information from Dense Stereo Matching[J]. Photogrammetrie Fernerkundung Geoinformation, 2012(5):631-645
P28
B
1672-4623(2016)07-0059-03
10.3969/j.issn.1672-4623.2016.07.018
姚远,硕士研究生,研究方向为地图学与地理信息系统。
2015-06-02。
项目来源:国家自然科学基金资助项目(41271452)。(*为通讯作者)
